

3.4 Алгоритм сравнения с шаблоном (TemplateMatching)
Сравнение с шаблоном – технология для поиска областей на изображении, которые совпадают с изображением-шаблоном с заданной точностью.
Требуется два компонента – исходное изображение (например, снимок с камеры) и изображение-шаблон. Чтобы определить сходный участок, нам нужно наложить шаблон на снимок и попиксельно двигать его, слева направо, сверху вниз. В каждом положении вычисляется метрика, которая показывает, совпадают картинки или нет.
Для каждого положения шаблона метрика заносится в результирующую матрицу R. Каждое положение (x,y) в R содержит метрику совпадений.
После окончания сравнения лучшие совпадения мы найдём в глобальных минимумах (при использовании метода наименьших квадратов) или максимумах (при использовании метода корреляции или метода кросс-корреляции).
Существуют несколько методов сравнения (метод наименьших квадратов, метод корреляции, метод кросс-корреляции)
Ниже рассмотрен пример применения алгоритма сравнения с шаблоном с использованием метода наименьших квадратов для нахождения метрики R(x,y)

где
 – матрица результатов,
– матрица результатов,
 -
текущие координаты шаблона,
-
текущие координаты шаблона,
 ,где
w и h-ширина и высота шаблона соответственно.
,где
w и h-ширина и высота шаблона соответственно.
Модель метода сравнения с шаблоном представлена на рис. 7-8
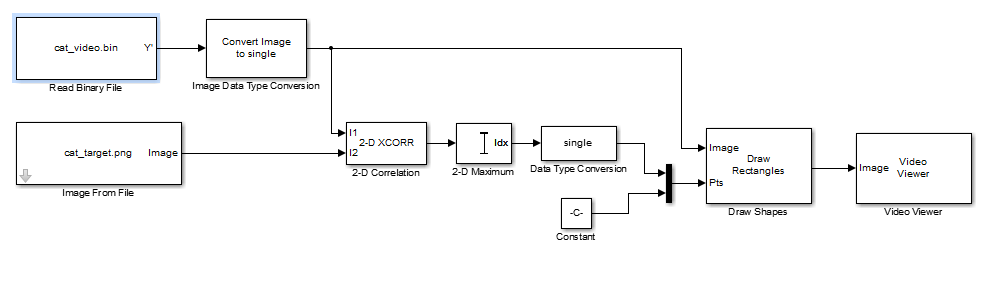
Рис. 7 Основное окно модели
Первый шаг алгоритма – загрузка в модель изображения-шаблона и видео-файла, который предварительно следует перевести в бинарный формат.
Блок «2-D Correlation» определяет коэффициент корреляции между шаблоном и текущим кадром видеофайла. Блок «2-D Maximum» определяет точки максимальной корреляции между изображениями.
В районе максимальной корреляции рисуется прямоугольник, затем из обработанных кадров получается новый видео-файл.


Рис.8 Результат работы модели
Данный метод является наиболее простым методом трекинга, но также и наиболее неточным, в процессе работы модели было обнаружено довольно много ошибок обнаружения.
4. Заключение
В данной работе были рассмотрены основные методы трекинга изображений – алгоритм Виолы-Джонса, алгоритм с использованием оптического потока и алгоритм сравнения с шаблоном. При этом выявились их преимущества и недостатки. Например, алгоритм с использованием оптического потока без ошибок работает со стационарными камерами, но при двигающейся камере результат распознавания становится абсолютно непредсказуемым. Алгоритм сравнения с шаблоном крайне прост в реализации, но при этом неустойчив, в его работе выявлено много ошибок.
Наилучшие результаты у алгоритма Виолы-Джонса – он также прост в реализации, обладает высоким быстродействием и устойчивостью при движении камеры. Несмотря на то, что существуют ошибки при трекинге характерных признаков, всегда можно подобрать такой классификатор, который будет учитывать эти ошибки и минимизировать их.
5. Список литературы
[1] Вудс, Гонзалес «Цифровая обработка изображений»
[2] http://habrahabr.ru/post/135244/
[3] http://robocraft.ru/blog/computervision
[4] MATLAB & Simulink User’s Guide