

3785
.pdf2 |
ВЫБОР ГЛАВНЫХ РАЗМЕРОВ |
ГЛАВА |
И РАСЧЕТ ОБМОТКИ СТАТОРА |
2.1. Выбор главных размеров и расчет обмотки статора
Расчет асинхронных машин начинают с определения главных размеров: внутреннего диаметра статора D и расчетной длины воздушного зазора lδ. Размеры D и lδ связаны с мощностью, угловой скоростью Ω и электромагнитными нагрузками А и Вδ выражением машинной постоянной Арнольда СА [11]:
С |
|
D2l |
|
2 |
. |
(2.1) |
|
А |
kBkоб АВ |
||||||
|
p/ |
|
|
|
На первом этапе расчета двигателя все величины, входящие в (2.1), кроме синхронной угловой скорости, неизвестны. Поэтому расчет проводят, задаваясь на основании имеющихся рекомендаций значениями электромагнитных нагрузок (А и Вδ), коэффициентов (αδ, kВ и koб), и приближенно определяют расчетную мощность Р'. Остаются два неизвестных (D и lδ), однозначное определение которых без дополнительных условий невозможно. Таким условием является отношение lδ/D или более употребительное в расчетной практике отношение λ = lδ /τ. Это отношение в значительной степени определяет экономические данные машин, а также оказывает влияние на характеристики и условия охлаждения двигателей.
У большинства выпускаемых асинхронных двигателей общего назначения отношение λ, изменяется в достаточно узких пределах. Поэтому для определения D и lδ можно предварительно выбрать то или иное отношение λ, характерное для заданного исполнения и числа полюсов машины. Это позволит однозначно определить главные размеры, исходя из (2.1). Однако внутренний диаметр статора непосредственно связан определенными размерными соотношениями с внешним диаметром статора Da, в свою очередь, определяющим высоту оси вращения h, значение которой при проектировании новых двигателей может быть принято только из стандартного ряда высот, установленных ГОСТом.
Определение внутреннего диаметра статора
Внешний диаметр статора должен также соответствовать определенным условиям, налагаемым требованиями раскроя листов электротехнической стали с наименьшими отходами при штамповке. С учетом этих требований при ручном расчете асинхронного двигателя более целесообразным является выбор главных размеров, основанный на предварительном определении высоты оси вращения, увязке этого размера с внешним диаметром статора и последующем расчете внутреннего диаметра статора D.
В связи с этим выбор главных размеров проводят в следующей последовательности. В случае когда высота оси вращения не задана в задании на проектировании, ее предварительно определяют по табл. 2.1 [7] для заданных Р2 и 2р в зависимости от исполнения двигателя.
11
Таблица 2.1 Увязка мощностей с установочными размерами для асинхронных двигателей серии 4А
Высота |
Обозначение |
|
Мощность двигателей |
|
Размеры |
||||||
оси |
длины |
со степенью защиты IP44, |
|
выступающего |
|||||||
вращения |
|
|
|
кВт при 2p |
|
|
|
конца вала |
|||
h, мм |
|
|
|
|
|
|
|
|
|
D1 x l1 |
|
|
|
2 |
4 |
|
6 |
8 |
10 |
|
12 |
2p=2 |
2p=4…12 |
56 |
– |
0,18 |
0,12 |
|
– |
– |
– |
|
– |
11 х 23 |
|
0,25 |
0,18 |
|
– |
– |
– |
|
– |
||||
|
|
|
|
|
|
||||||
63 |
– |
0,37 |
0,25 |
|
0,18 |
– |
– |
|
– |
14х30 |
|
0,55 |
0,37 |
|
0,25 |
– |
– |
|
– |
||||
|
|
|
|
|
|
||||||
71 |
– |
0,75 |
0,55 |
|
0,37 |
0,25 |
– |
|
– |
19х40 |
|
1,1 |
0,75 |
|
0,55 |
– |
– |
|
– |
||||
|
|
|
|
|
|
||||||
80 |
– |
1,5 |
1,1 |
|
0,75 |
0,37 |
– |
|
– |
22х50 |
|
2,2 |
1,5 |
|
1,1 |
0,55 |
– |
|
– |
||||
|
|
|
|
|
|
||||||
90 |
L |
3 |
2,2 |
|
1,5 |
0,75 |
– |
|
– |
24х50 |
|
1,1 |
– |
|
– |
||||||||
|
|
|
|
|
|
|
|
|
|||
100 |
S |
4 |
3 |
|
– |
– |
– |
|
– |
28х60 |
|
L |
5,5 |
4 |
|
2,2 |
1,5 |
– |
|
– |
|||
|
|
|
|
|
|||||||
112 |
M |
7,5 |
5,5 |
|
3 |
2,2 |
– |
|
– |
32х80 |
|
|
4 |
3 |
– |
|
– |
||||||
|
|
|
|
|
|
|
|
||||
132 |
S |
– |
7,5 |
|
5,5 |
4 |
– |
|
– |
38х80 |
|
M |
11 |
11 |
|
7,5 |
5,5 |
– |
|
– |
|||
|
|
|
|
|
|||||||
160 |
S |
15 |
15 |
|
11 |
7,5 |
– |
|
– |
42х110 |
48х110 |
M |
18,5 |
18,5 |
|
15 |
11 |
– |
|
– |
|||
180 |
S |
22 |
22 |
|
– |
– |
– |
|
– |
48х110 |
55х110 |
M |
30 |
30 |
|
18,5 |
15 |
– |
|
– |
|||
200 |
M |
37 |
22 |
|
18,5 |
– |
– |
|
– |
55х110 |
60х140 |
L |
45 |
30 |
|
22 |
– |
– |
|
– |
|||
225 |
M |
55 |
55 |
|
37 |
30 |
– |
|
– |
55х110 |
65х140 |
250 |
S |
75 |
75 |
|
45 |
37 |
– |
|
– |
65х140 |
75х140 |
M |
90 |
90 |
|
55 |
45 |
– |
|
– |
|||
280 |
S |
110 |
110 |
|
75 |
55 |
– |
|
– |
70х140 |
80х170 |
M |
132 |
132 |
|
90 |
75 |
– |
|
– |
|||
315 |
S |
160 |
160 |
|
110 |
90 |
55 |
|
45 |
75х140 |
90х170 |
M |
200 |
200 |
|
132 |
110 |
75 |
|
55 |
|||
355 |
S |
250 |
250 |
|
160 |
132 |
90 |
|
75 |
85х170 |
100х210 |
M |
315 |
315 |
|
200 |
160 |
110 |
|
90 |
|||
Из ряда высот осей вращения принимают ближайшее к предварительно найденному меньшему стандартному значению h. Следует иметь в виду, что ГОСТ 13267-73 (СТ СЭВ 4435-83) определяет стандартные высоты осей вращения независимо от назначения и конструктивного исполнения асинхронных двигателей, поэтому высота оси вращения любого проектируемого двигателя должна быть равна одному из этих значений: 25, 28, 32, 36, 40, 45, 50, 56, 63, 71, 80, 90,100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400, 450, 500, 560, 630, 710, 800, 900, 1000 мм.
Номинальные высоты оси вращения свыше 1000 мм должны соответствовать значениям 100…1000, умноженным на 10, а для высот оси вращение меньше 25мм – значениям 25…200, делёнными на 10. Допускается использование нулевой высоты оси вращения.
12

Зависимость (2.1) показывает, что при одной и той же длине l мощность P' изменяется пропорционально D2. Поэтому машину при выбранной высоте оси вращения выгодно выполнять с возможно большим диаметром. Максимально возможный диаметр Dа должен быть Da ≤ 2(h – h1min), где h1min – минимальное расстояние от стали сердечника статора до опорной плоскости машины (рис. 2.1), включающее толщину корпуса bкорп и расстояние от корпуса до опорной плоскости h2. Если машина выполняется со сварной станиной, то допустимое расстояние h1min уменьшается. В том случае, когда h1 >> h1min, в нижней части корпуса оребренных двигателей исполнения со степенью защиты IP44 размещают несколько охлаждающих ребер, высота которых может быть меньше, чем у расположенных на верхней и боковых частях корпуса.
Обычно расстояние h1 выбирают равным или несколько большим h1min, значения которого для двигателей с различной высотой оси вращения h приведены на рис. 2.2. При выборе Da должно быть учтено также требование использования для штамповки рулонной или листовой электротехнической стали стандартных размеров с наименьшими отходами.
Внешние диаметры сердечников статоров двигателей серий в зависимости от высоты оси вращения при учебном проектировании могут быть приняты по данным табл. 2.2 [11].
|
|
|
|
|
Рис. 2.2. Минимально допустимое |
||||
|
Рис. 2.1. К выбору наружного |
|
расстояние h1 от сердечника статора |
||||||
|
|
до опорной поверхности двигателя |
|||||||
|
|
диаметра Dc статора |
|
в зависимости от высоты оси вращения |
|||||
|
|
|
|
|
двигателей со станиной: |
||||
|
|
|
|
|
|
1 – литой; 2 – сварной |
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Таблица 2.2 |
||
|
|
Внешние диаметры статоров асинхронных двигателей |
|||||||
|
|
|
различных высот оси вращения |
|
|
|
|||
|
h, мм |
56 |
63 |
71 |
80 |
90 |
|
||
|
Da, мм |
0,08– 0,096 |
0,1–1,08 |
0,116–0,122 |
0,131–0,139 |
0,149–0,157 |
|
||
|
h, мм |
100 |
112 |
132 |
160 |
180 |
|
||
|
Da, мм |
0,168–0,175 |
0,191-0,197 |
0,225–0,233 |
0,272–0,285 |
0,313–0,322 |
|
||
|
h, мм |
200 |
225 |
250 |
280 |
315 |
255 |
|
|
|
Da, мм |
0,349–0,359 |
0,392–0,406 |
0,437–0,452 |
0,52-0,53 |
0,59 |
0,66 |
|
|
Внутренний диаметр статора D в общем случае можно определить по внешнему диаметру Dа, высотам ярма (ha) и зубцов (hz) статора:
D = Da – 2(ha + hz).
На данном этапе расчета размеры ha и hz неизвестны. Поэтому для определения D используют эмпирические зависимости. При одном и том же уровне индукции на участках магнитопровода в машинах с одинаковым D высота ярма статора будет пропорциональна потоку, а следовательно, обратно пропорциональна числу полюсов машины (прямо пропорциональна полюсному делению). Принимая, что размеры пазов не зависят от числа полюсов машины, получаем приближенное выражение
13

D = KDDa. |
(2.2) |
Значения коэффициентов КD, приведенные в табл. 2.3, характеризуют отношения внутренних и внешних диаметров сердечников статоров асинхронных двигателей серий 4А и АИ при различных числах полюсов и могут быть использованы для предварительного определения D вновь проектируемой машины.
Таблица 2.3 Отношение КD = D/Da, в асинхронных двигателях
в зависимости от числа полюсов
2p |
2 |
4 |
6 |
8 |
10–12 |
КD |
0,52–0,6 |
0,62–0,68 |
0,7–0,72 |
0,72–0,75 |
0,75–0,77 |
Далее находят полюсное деление τ, м:
τ = πD/2p |
|
(2.3) |
||
и расчетную мощность P' , Вт: |
|
|
||
|
kЕ |
|
(2.4) |
|
P' mIE P2 cos |
, |
|||
|
||||
где Р2 – мощность на валу двигателя, Вт; kE – отношение ЭДС обмотки статора к номинальному напряжению, которое может быть приближенно определено по рис. 2.3, η – КПД, соs φ – коэффициент мощности.
KЕ |
2p=2 |
|
|
|
|
|
0,98 |
|
4 |
|
|
|
|
0,97 |
|
6 |
|
|
|
|
|
|
|
|
|
|
|
0,96 |
|
8 |
|
|
|
|
|
|
|
|
|
|
|
0,95 |
|
|
|
|
|
|
0,94 250 |
|
|
|
|
|
Da |
300 |
350 |
400 |
450 |
500 |
мм |
|
|
Рис. 2.3. Значения коэффициента KE |
|
|
|||
Предварительные значения η и cos φ, если они не указаны в задании на проектирование, находятся по ГОСТу. Приближенные значения η и cos φ могут быть приняты по кривым рис. 2.4.
Предварительный выбор электромагнитных нагрузок А, А/м, и Bδ, Тл, должен быть проведен особо тщательно, так как они определяют не только расчетную длину сердечника, но и в значительной степени характеристики машины. При этом если главные размеры машины зависят от произведения АВδ, то на характеристики двигателя оказывает существенное влияние также и соотношение между этими величинами. Рекомендации по выбору А и Вδ представлены в виде кривых на рис. 2.5 – 2.6 для машин различных мощности и исполнения.
14

На каждом из рисунков даются области их допустимых значений. При выборе конкретных значений А и Вδ в пределах рекомендуемой области следует, руководствуясь приведенными выше замечаниями, учитывать требования технического задания к характеристикам проектируемого двигателя.
Рис. 2.4. Примерные значения КПД и cos φ асинхронных двигателей:
а– со степенью защиты IP44 и мощностью до 30 кВт; б – со степенью защиты IP44
имощностью до 400 кВт; в – со степенью защиты IP23
Рис. 2.5. Электромагнитные нагрузки асинхронных двигателей со степенью защиты IP44 при высоте оси вращения:
а – h ≥ 132 мм; б – h = 150…250 мм; в – h ≥ 280 мм (с продуваемым ротором)
15

Рис. 2.6. Электромагнитные нагрузки асинхронных двигателей со степенью защиты IP23 при высоте оси вращения: а – h = 160…250 мм; б – h ≥ 280 мм;
Коэффициент полюсного перекрытия αδ и коэффициент формы поля kВ в асинхронных машинах определяются степенью уплощения кривой поля в зазоре, возникающей при насыщении зубцов статора и ротора, и могут быть достаточно достоверно определены толь ко после расчета магнитной цепи. Поэтому для расчета магнитной цепи удобнее рассматривать синусоидальное поле, а влияние искажения формы поля учесть при расчете магнитного напряжения отдельных участков магнитной цепи.
Основываясь на этом, значения коэффициентов предварительно принимают равными:
αδ = 2/π ≈ 0,64; kВ = π/(2
 2 ) = 1,11.
2 ) = 1,11.
Предварительное значение обмоточного коэффициента koб1 выбирают в зависимости от типа обмотки статора. Для однослойных обмоток koб1 = 0,95...0,96. Для двухслойных и одно- двухслойных обмоток при 2р = 2 следует принимать koб1 = 0,90... 0,91 и при большей по-
люсности koб1 = 0,91. ..0,92.
Синхронная угловая частота двигателя Ω, рад/с, рассчитывается по формуле
Ω = 2π n1 или Ω = 2π f1
60 p
где n1 – синхронная частота вращения, об/мин; f1 – частота сети, Гц.
Из (1.1), с учетом значения αδ , расчетная длина магнитопровода, м,
p/
l D2 kBkоб1АВ .
(2.5)
(2.6)
Критерием правильности выбора главных размеров D и lδ служит отношение λ = lδ /τ, которое обычно находится в пределах, показанных на рис. 2.7 для принятого исполнения машины. Если λ оказывается чрезмерно большим, то следует повторить расчет для ближай-
16

шей из стандартного рада большей высоты оси вращения h. Если λ слишком мало, то расчет повторяют для следующей в стандартном раду меньшей высоты h.
На этом выбор главных размеров заканчивается. В результате проведенных вычислений получены значения высоты оси вращения h, внутреннего диаметра статора D, внешнего диаметра статора Dа, расчетной длины магнитопровода lδ и полюсного деления τ.
|
|
IР44 |
|
|
|
|
IР23 |
|
|
2,0 |
|
|
|
|
1,5 |
|
|
|
|
1,0 |
|
|
|
|
0,5 |
|
|
|
|
0 |
|
|
2р |
|
4 |
6 |
8 |
||
2 |
||||
Рис. 2.7. Отношение λ = lδ /τ асинхронных двигателей |
||||
Для расчета магнитной цепи помимо lδ необходимо определить конструктивную длину и длину стали сердечников статора (l1 и lст1) и ротора (l2 и lст2). В асинхронных двигателях, длина сердечников которых не превышает 250...300 мм, радиальные вентиляционные каналы не делают. Сердечники шихтуются в один пакет. Для такой конструкции
l1 = lст1 = lδ. |
(2.7) |
В более длинных машинах сердечники разделяют на отдельные пакеты, разделенные между собой радиальными вентиляционными каналами. В двигателях с фазными роторами или со сварной короткозамкнутой обмоткой пакеты выполняют длиной 40...60 мм. Крайние пакеты могут быть более длинными. В двигателях с литой короткозамкнутой обмоткой ротора число пакетов по технологическим соображениям из-за сложности заливки уменьшают и пакеты выполняют более длинными.
Стандартная ширина радиального воздушного канала между пакетами bk = 10 мм. Число пакетов nпак и их длина lпак связаны с расчетной длиной следующим соотношением:
nпак = lст / lпак ≈ lδ / lпак = целое число, |
(2.8) |
при этом число радиальных каналов nк = nпак - 1. |
|
Длина стали сердечника статора в таких машинах |
|
lст1 = lпак nпак, |
(2.9) |
или при пакетах разной длины |
|
17
lст1 = lпак |
(2.10) |
Конструктивная длина сердечника статора
l1 = lст1 + bк nк. |
(2.11) |
Окончательное значение lδ для машин с величиной воздушного зазора δ < 1,5 мм
lδ ≈ lст1. |
(2.12) |
В машинах с δ ≥ 1,5 мм при расчете lδ учитывают искривление магнитных силовых линий потока в воздушном зазоре над радиальными вентиляционными каналами:
lδ ≈ l1 - b'к nк, |
(2.13) |
где b'к – расчетная ширина радиальных каналов, зависящая от соотношения δ и bк. Значение b'к при bк = 10 мм определяется по табл. 2.4 либо из выражения
b'к = γ'δ |
(2.14) |
где |
/ |
|
2(bk / )2 |
|
|
|
|
. |
|
|
|
|||
5 2(bk / )
Таблица 2.4 Расчетная ширина радиальных каналов b'к при bk = 10 мм
δ, мм |
1,5 |
1,6 |
1,7 |
1,8 |
1,9 |
2,0 |
2,5 |
3,0 |
b'к, мм |
7,3 |
7,1 |
7,0 _ |
6,9 |
6,8 |
6,7 |
6,2 |
5,7 |
Конструктивную длину сердечника ротора в машинах с h < 250 мм берут равной длине сердечника статора, т. е. l2 = l1. В двигателях больших габаритов ротор выполняют длиннее статора за счет увеличения длины его крайних пакетов на 5 мм и в крупных машинах высокого напряжения – на 10 мм.
Длина стали сердечника ротора
lст2 = lпак2 = l2 – nкbк |
(2.15) |
Выбор и расчет обмотки статора
Следующий этап расчета включает определение числа пазов статора Z1 и числа витков в фазе обмотки статора w1. При этом число витков фазы обмотки статора должно быть таким, чтобы линейная нагрузка двигателя и индукция в воздушном зазоре как можно более близко совпадали с их значениями, принятыми предварительно при выборе главных размеров, а число пазов статора обеспечивало достаточно равномерное распределение катушек обмотки.
Чтобы выполнить эти условия, вначале выбирают предварительно зубцовое деление tz1, в зависимости от типа обмотки, номинального напряжения и полюсного деления машины. Для более равномерного распределения катушек обмотки по длине окружности зазора необходимо большое число пазов, а следовательно, маленькие зубцовые деления. В то же время ширина паза, составляющая примерно половину зубцового деления, не должна быть слишком малой, так как в этом случае ухудшается заполнение паза медью обмотки, а в ма-
18
шинах небольшой мощности может также недопустимо уменьшиться механическая прочность зубцов. Кроме того, надо иметь в виду, что стоимость машины с увеличением числа пазов возрастает, так как увеличиваются сложность штампа и трудоемкость изготовления и укладки обмоток.
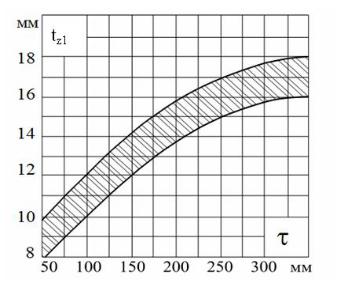
Значения зубцовых делений статора tz1 асинхронных двигателей с обмоткой из круглого провода, необходимые для предварительного выбора числа пазов, приведены на рис. 2.8 [14]. Меньшие значения в каждой из показанных на рисунке областей возможных значений tz1 характерны для машин меньшей мощности для каждого из диапазонов высот осей вращения.
Рис. 2.8. Зубцовые деления статоров асинхронных двигателей
При выборе типа обмотки и формы паза в асинхронных двигателях с напряжением (линейным) до 660 В включительно, целесообразно воспользоваться рекомендациями, приведенными в табл. 2.5 [13].
|
|
Тип обмотки и форма пазов статора |
Таблица 2.5 |
|
|
|
|
||
h, мм |
2p |
Тип обмотки |
Форма паза |
|
50-160 |
2, 4, 6, 8 |
Однослойная всыпная концентрическая |
Трапецеидальный |
|
двухплоскостная |
полузакрытый |
|||
|
|
|||
180-250 |
2, 4, 6, 8 |
Двухслойная всыпная |
Трапецеидальный |
|
полузакрытый |
||||
|
|
|
||
280-355 |
2, 4, 6, 8 |
Двухслойная из жестких полукатушек |
Прямоугольный |
|
355 |
10, 12 |
полуоткрытый |
||
|
||||
280;315 |
10,12 |
Двухслойная всыпная концентрическая |
Трапецеидальный |
|
полузакрытый |
||||
|
|
|
Для машин с обмоткой из прямоугольного провода при Uном ≤ 660 В и в высоковольтных машинах tz1 зависит от мощности и номинального напряжения и может быть взято в соответствии с данными табл. 2.6. В процессе расчета целесообразно не ограничиваться выбором какого-либо одного конкретного зубцового деления, а, руководствуясь приведенными выше соображениями, рассмотреть диапазон возможных значений tz1 в пределах указанных значений зубцовых делений tz1min...tz2max. Тогда возможность числа пазов статора Z1, соответствующих выбранному диапазону tz1,
Z1min...Z1max |
D |
... |
D |
(2.16) |
|
tz2min |
|||
|
tz1max |
|
||
19
Таблица 2.6 Зубцовое деление статора tz1, м, при прямоугольных пазах
Полюсное |
|
Напряжение, В |
|
деление τ, м |
до 660 |
3000 |
6000 |
Менее 0,15 |
0,016–0,02 |
0,022–0,025 |
0,024–0,03 |
0,15–0,4 |
0,017–0,022 |
0,024–0,027 |
0,026–0,024 |
Более 0,4 |
0,02–0,028 |
0,026–0,032 |
0,028–0,038 |
Окончательное число пазов статора Z1 следует выбирать в полученных пределах с учетом условий, налагаемых требованиями симметрии обмотки, и желательного для проектируемой машины значения числа пазов на полюс и фазу q1. Число пазов статора в любой обмотке асинхронных машин должно быть кратно числу фаз, а число q1 = Z1/(2pm) в большинстве асинхронных машин должно быть целым. Лишь в многополюсных асинхронных двигателях иногда выполняют такое число пазов, при котором q1 является дробным, причем большей частью со знаменателем дробности, равным двум, например q1 = 2 1/2 или 3 1/2. В отдельных случаях это правило может быть нарушено, однако необходимо иметь в виду, что обмотки с дробным q1 при сравнительно небольших числах пазов и полюсов, характерных для большинства асинхронных двигателей, приводят к некоторой асимметрии МДС. Поэтому выбор окончательного числа пазов следует проводить с четкой увязкой и контролем получаемого при этом числа q. Окончательное значение tz1 = πD/(2pmq) не должно выходить за указанные выше пределы более чем на 10 % и в любом случае для двигателей с h ≥ 56 мм не должно быть менее 6–7 мм.
При определении числа эффективных проводников в пазу uп руководствуются следующим: uп должно быть целым, а в двухслойной обмотке желательно, чтобы оно было кратным двум. Применение двухслойных обмоток с нечетным uп допускается лишь в исключительных случаях, так как это приводит к необходимости выполнять разновитковые катушки, что усложняет технологию изготовления и укладки обмотки. Поэтому полученные в расчете числа uп приходится округлять до ближайшего целого или четного числа. Чтобы это округление не было слишком грубым (что особенно заметно при малых uп), вначале определяют предварительное число эффективных проводников в пазу u'п при условии, что параллельные ветви в обмотке отсутствуют (а = 1)
u'п = πDA / I1ном Z1, |
(2.17) |
где А – принятое ранее значение линейной нагрузки, А/м: I1ном – номинальный ток обмотки статора, А:
I1ном = Р2 / (mU1ном η cosφ)/ |
(2.18) |
Полученное по (2.17) значение u'п не округляют до целого, а находят такое число параллельных ветвей обмотки а, при котором число эффективных проводников в пазу либо будет полностью удовлетворять отмеченным условиям, либо потребует лишь незначительного изменения:
uп = а u'п. |
(2.19) |
Число а при этом, естественно, может быть взято только из ряда возможных чисел параллельных ветвей для обмотки данного типа и заданного числа полюсов, при условии что ток в проводниках не может превышать предельно допустимого значения для выбранной марки обмоточного провода.
20