

3744
.pdfРис. 4.1. Диаграммы кодирования аналогового сигнала
Всистемах с ИКМ применяются такие же способы манипуляции как и в каналах с дискретными сигналами.
Составные сигналы могут быть последовательными, когда образуются совокупности элементарных сигналов, следующих один за другим во времени.
Вслучае параллельного составного сигнала, совокупность элементарных сигналов передается одновременно. Возможет и параллельно-последовательный сложный сигнал, в котором часть элементов передается в различные интервалы времени, а часть одновременно.
Примером последовательного составного кода является сигнал, состоящий из отрезков синусоидальных колебаний одной частоты, где элементом сигнала является отрезок синусоидального колебания длительностью T/N с той или иной начальной фазой. Последовательность смены начальных фаз элементов определяется чаще всего последовательностями (кодами) Баркера или Хаффмана в случае двух вариантов
61
начальных фаз. Эти последовательности являются также шумоподобными сигналами в которых начальная фаза изменяется через некоторые интервалы времени. Манипуляция фазы осуществляется так, чтобы сигнал был достаточно широкополосным и приближался к спектру шумоподобного сигнала. Подобные сигналы используются для разделения лучей в многолучевых каналах связи, подавление сосредоточенных помех, а также для построения систем скрытой радиосвязи. В этих сигналах применяется манипуляция фазы на π в кодовых интервалах τ0.
Последовательный сигнал может состоять из отрезков различных частот, когда за время τ0 излучается колебание частотой f1, а за время прилегающего к нему отрезка времени, излучается колебание частоты f2. Элементарным сигналом по - прежнему является отрезок синусоидального колебания. Составной сигнал образуется последовательной передачей отрезков колебаний различных частот, генерируемых по заданному закону. Этот случай соответствует ЧМ. При этом база сигнала равна 2∆ FTc=Nm, где N- число элементов, m- число частот, используемых для формирования сигнала.
Параллельный составной сигнал представляет собой сумму ортогональных гармонических колебаний. В этом случае элементом сигнала является отрезок колебания определенной частоты длительности Tc. Составной сигнал представляет собой сумму ортогональных колебаний разных частот на интервале Tc. Эти сигналы используются для работы в условиях мощных сосредоточенных помех и в каналах с селективными замираниями.
В системах связи предусматриваются также и дискретные методы передачи. При этом оценка широкополосности дискретных сигналов основана на сравнении базы сигнала с единицей. При этом базой сигнала B=2∆FTc, где ∆F – полоса частот, занимаемая сигналом; Tc- длительность сигнала. Элементарным сигналом принято считать сигнал длительностью τ0 без избыточности, база
62
которого равняется единице. Элементарные сигналы могут иметь малую длительность и большую полосу частот, это широкополосные элементарные сигналы. Узкополосные элементарные сигналы имеют большую длительность и малую полосу частот.
В большинстве случаев за полосу сигнала принимают полосу частот, в которой сосредоточена большая часть энергии сигнала: например 90 % или 95 %. При этом элементарные сигналы могут иметь импульсы различной формы: прямоугольную (∆Fτ0=0,81), треугольную (∆Fτ0=0,84), косинусоидальную (скважность равна двум), для которых ∆Fτ0=0,73 и колокообразную (∆Fτ0=0,60). Для таких элементарных сигналов база соответствует интервалу частот, на котором сосредоточено 90 % энергии сигнала [10].
4.3. Основы технической реализации цифровой модуляции
Основной проблемой построения любой системы связи является выбор и техническая реализация способов ведения передаваемой информации, физический переносчик в точке передаче и выделение этой информации в точке приема. Это наиболее тонкая задача известна как проблема «модуляции и демодуляции».
Цифровые системы передачи обладают следующими особенностями:
-любые сообщения представляются в цифровой форме, т.е. в виде последовательности битов {aj,i=…,-1,0,+1,…}, при любом значении индекса i, символ ai принимает значение
{0,1};
-передатчик системы формирует и передает по очереди
в канал |
конечное число сигналов {sm(t), |
m=1,2,…,M}, |
|
различающихся по форме, которые |
принято называть |
||
канальными символами, равными по длительности Tкс. Один |
|||
канальный символ переносит один бит |
или |
больше число |
|
|
63 |
|
|
битов, подлежащих передаче; при M=2 систему передачи называют двоичной; при М>2 систему называют M-ичной [13].
Таким образом, передача сообщений цифровыми системами осуществляется путем преобразования их последовательности битов, которые преобразуются в последовательности канальных символов.
Число используемых канальных символов M и их форма в различных системах различна и они известны в точке приеме. Поэтому основная функция приемника, а точнее его демодулятора в цифровой системе передачи состоит в том, чтобы оценить какой из возможных символов (сигналов) был передан передатчиком был передан передатчиком на интервале времени длительностью Tкс.
Проблема оценивания (различения) сигналов возникает потому, что системы передачи должны проектироваться таким образом, чтобы передатчик излучал, а приемник правильно принимал канальные символы с минимально возможной энергией.
Пер. биты
Имп. модул.
Имп. демод.
Прин. биты
Рис. 4.2. Временные диаграммы сигналов в устройствах цифровой передачи
64
Критическим местом в системе передачи, в котором энергия канальных символов оказывается наименьшей, является вход приемника. Энергия принимаемого символа Ес здесь должна быть не менее некоторого порогового значения Епор, которое определяется заданным пороговым значением отношения сигнал/шум (ОСШ) qпор2.
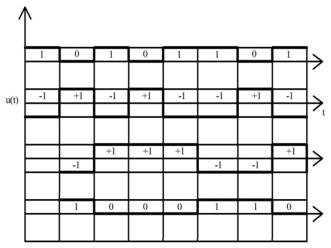
До формирования канальных символов подлежащие передачи биты обычно сначала преобразуются в последовательность положительных и отрицательных импульсов длительностью Тс, прямоугольной формы, для которой принимаем обозначение v(t); последовательность полученных таким образом импульсов называется модулирующим сигналом.
Преобразование последовательности битов в последовательность электрических импульсов осуществляется по следующему правилу: 0→bv(t), 1→ -bv(t), где b>0 – амплитуда импульса. При этом модулирующий сигнал
u(t)= ( ) = ∑ ( − ) . |
(4.2) |
В этом равенстве суммирование осуществляется по всем возможным значениям индекса i, а множитель bi, может принимать значения +b или –b [13].
На рис. 4.2 представлены примеры реализации сигналов при цифровой модуляции: последовательность переданных битов {ai}, а последовательность электрических импульсов модулятора прямоугольной формы и различной полярности {bi}, восстановленная в приемнике последовательность электрических импульсов демодулятора и, наконец, последовательность принятых битов { }. Здесь не приведены канальные символы. Угловой скобкой над символами обозначены их оценки.
Необходимо отметить два важных обстоятельства: искажение формы сигнала и его временную задержку при
65
прохождении через канал передачи. Искажения формы сигнала обусловлены двумя факторами:
-наличием в передатчике и приемнике специальных устройств формирования и обработки электрических сигналов;
-наличием помех в канале передачи.
4.4.Методы цифровой модуляции в мобильной связи
Втехнике подвижной радиосвязи методы модуляции играют важную роль. Помимо своей основной функции преобразования низкочастотного модулирующего сигнала в высокочастотный сигнал с изменяющейся частотой, фазой или амплитудой (с изменяющимися модулируемыми параметрами) процесс модуляции является составной частью общего процесса с характеристиками канала. Современные методы многопозиционной модуляции в полном соответствии с теоремой Шеннона могут рассматриваться и как способ кодирования данных сообщений в символы канала.
Рассмотрим, как меняется полоса частот радиоканала при различных способах манипуляции. Поступающий на вход передатчика ЦИС Vцис представляет собой последовательность логических “единиц” (коротких импульсов) и логических “нулей”, следующих с тактовой частотой ft=1/TT (рис. 4.3, а). Для манипуляции в передатчике формируется управляющий (модулирующий) сигнал Vy по следующему закону (рис. 4.3, б): приходу “1” ЦИС соответствует управляющий импульс с амплитудой +1, длительностью Тт, который далее будем условно обозначать как “1”, поступлению “О” ЦИС соответствует управляющий импульс с амплитудой -1, длительностью Тт, который далее будем условно обозначать как “0”. Сигнал Vy на рис. 4.3, б относится к классу сигналов, не обращающихся в ноль.
66
4.4.1. Амплитудная модуляция
Простейшим методом манипуляции является AM, при которой цифре “1” напряжения Vy соответствует излучение РЧ колебания, а “0” Vy — пауза. Радиосигнал AM описывается законом
UAM=U(l+Vy(t))cos(ωot). (4.3)
В чистом виде AM в цифровой радиосвязи применяется редко из-за низкой помехоустойчивости. Однако оценку эффективности других методов манипуляции удобно проводить путем сравнения с AM. Полоса частот, занимаемая AM сигналом, определяется, как и при обычной амплитудной модуляции. Спектр AM сигнала состоит из несущей (4.2) и боковых частот[14].
67
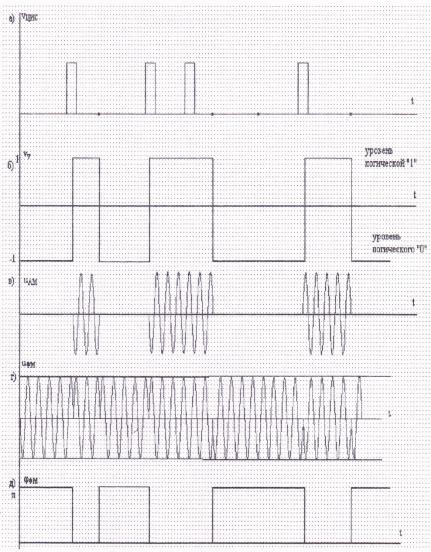
Рис. 4.3. Временные диаграммы формирования
сигналов с АМ и ФМ
68
Полоса частот, занимаемая радиосигналом цифровой связи, достаточно велика и значительно превышает полосу частот аналоговым радиосигналом .
Требуемая полоса частот пропорциональна скорости передачи. Поэтому при больших скоростях передачи необходимо стремиться к эффективному использованию спектра, т. е. сужать полосу частот при сохранении объема передаваемой информации путем использования сигналов с ограниченным спектром (разд.3).
4.4.2. Фазовая модуляция
Радиосигнал при бинарной фазовой манипуляции (называемой также двоичной ФМ или ФМ-2) BPSK (BinaryPhaseShiftKeying) можно представить в виде:
s[t; U(t)] = U (t)cos(ω0t ± π) . |
(4.4) |
То есть модулированный сигнал имеет вид гармонических колебаний, фаза которых в зависимости от передаваемого символа +1 или -1 может меняться скачком на ±
π.
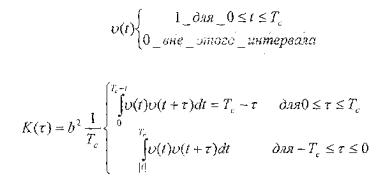
Рассмотрим частный случай, как правило, используемый в цифровых системах передачи, когда форма символа υ(t) является прямоугольной:
(4.5)
69

С учетом преобразования сигнала, имеем
(4.7)
Спектральную плотность мощности модулирующего процесса при форме символа вычисляем как преобразование Фурье:
.
(4.8)
Поэтому спектральная плотность мощности радиосигнала может быть получена из спектра модулирующего сигнала:
(4.9)
а физический спектр (т.е. только для положительных частот) ФМ-2радиосигнала в рассматриваемом случае имеет вид:
(4.10)
С целью последующего сравнения спектров для различных способов модуляции введем нормировку спектра на
70