

3618
.pdfРасчет главных размеров
|
|
и |
размерность |
|
|
|
|
|
|
|
|
|
|
|
|
|
№ |
Наименовани |
Обозначение |
Расчетная |
Численное значение |
||||||||||||
|
е величины |
|
|
формула |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
Удельная |
fт., |
2 |
— |
20 103 |
|
|
|
|
|||||||
|
тяговая сила |
Н/м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
Диаметр |
D2, м |
— |
0,018 |
|
|
|
|
||||||||
штока |
|
|
|
|
||||||||||||
|
Площадь |
|
|
Sa |
FTmax |
|
160 |
|
|
|
|
|||||
3 |
активной |
Sа, м2 |
|
|
|
0,008 |
||||||||||
fТ |
|
|
||||||||||||||
поверхности |
|
20 10 |
3 |
|||||||||||||
|
|
|
|
|
|
|
|
|
||||||||
|
двигателя |
|
|
|
|
|
|
|
|
|
|
|||||
4 |
Диаметр |
Dм, м |
— |
0,016 |
|
|
|
|
||||||||
|
магнита |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Длина |
|
|
Lа |
Sа |
|
|
0,004 |
0,16 |
|||||||
5 |
активной |
Lа, м |
|
|
0,016 |
|||||||||||
DM |
|
|||||||||||||||
|
части |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||
6 |
Число пар |
р |
|
p |
La |
|
|
|
|
0,008 |
|
|
4 |
|||
полюсов |
|
2 |
|
2 0,02 |
||||||||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скорость |
Vs,м/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
подвижной |
— |
4 |
|
|
|
|
|||||||||
2 |
|
|
|
|
|
|||||||||||
|
части |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
Полезная |
Р2 max, |
P2max FТmax VS |
|
40 4 160 |
|||||||||||
мощность |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
61 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
№ |
Наименовани |
Обозначение размерность |
Расчетная |
|
|
Численное значение |
|
|||||||||
|
е величины |
|
формула |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
КПД |
|
η |
— |
|
|
|
|
|
|
0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Число |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
параллельны |
а |
|
|
|
|
|
|
|
2 |
|
|
|
|
||
|
х ветвей фазы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
Число фаз |
|
m |
— |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
12 |
Действующи |
Iа, А |
Iа |
|
P2max |
|
|
160 |
7,2 |
|||||||
|
й ток |
в |
|
|
|
|
|
|
|
|
|
|||||
|
|
a m U |
|
|
||||||||||||
|
|
|
|
|
||||||||||||
|
обмотке |
|
|
|
|
|
2 2 22 0,5 |
|
|
|||||||
|
якоря |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13 |
Длина пакета |
L , |
L |
DM |
|
|
0,016 0,0502 |
|||||||||
|
якоря |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14 |
Полюсное |
|
τ, м |
— |
|
|
|
|
|
|
0,02 |
|
|
|
|
|
|
деление |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
Число |
в |
Nк, |
— |
|
|
|
|
|
|
8 |
|
|
|
|
|
|
катушек |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
фазе |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
16 |
Плотность |
|
jдоп,А/ |
— |
|
|
|
|
|
|
6 106 |
|
|
|
|
|
|
тока |
|
м2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
17 |
Определим |
|
Sм, м2 |
Sм |
|
Ia |
, |
|
3,6 |
0,6 10 |
6 |
, |
||||
|
площадь |
|
|
|
|
|
|
|
|
|||||||
|
|
|
а jдоп |
|
|
6 106 |
|
|||||||||
|
сечения |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
элементар- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ного |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
проводника |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Воронежский государственный технический университет
62
УДК 621.313
П.А. Агарков, С.А. Белозоров
ИССЛЕДОВАНИЕ ВЛИЯНИЯ ЗАДАНИЯ ГРАНИЧНЫХ УСЛОВИЙ НА КАРТИНУ МАГНИТНОГО ПОЛЯ ПОСТОЯННОГО МАГНИТА ПРИ МОДЕЛИРОВАНИИ В CAE СИСТЕМАХ
Рассматриваются особенности моделирования магнитов различных форм с учётом количества полюсов с помощью граничных условий второго рода
За последнее десятилетие при проектировании различных устройств все чаще используют программные продукты, позволяющие создавать компьютерные модели. В моделях реализуют наглядное изображение сложных физических процессов, что значительно облегчает процесс проектирования.
ВCAE системах возможна реализация различных физических процессов. Одной из задач, рассматриваемых в данных системах, является магнитостатика. Актуальным направлением в этой отрасли считается моделирование постоянных магнитов различной конфигурации.
Используя CAE систему Elcut, можно существенно облегчить процесс проектирования устройств, включающих в свою конструкцию постоянные магниты.
Вданной статье будет рассмотрено влияние задания граничных условий на картину магнитного поля в целом. Она будет меняться в зависимости от выбора граничных условий. На практике, распределение магнитно-силовых линий зависит от способа намагничивания.
Всравнение будут приводиться 2 варианта условий: с помощью задания магнитной проницаемости и коэрцитивная силы, через токовый слой на поверхности магнита (граничное условие второго рода). Для наглядности результаты будут визуализированы.
Задачей Неймана (граничное условие второго рода) является тот случай, когда требуется найти решение уравнения в некоторой области пространства, на границе которой внешняя нормальная производная имеет значение отличное от нуля.
Применяя различные способы задания граничных условий к решению задач магнитостатики, в частности, при моделировании
63

магнитного поля постоянного магнита, следует отметить, что для моделирования необходимо знать параметры магнита, такие как коэрцитивная сила и остаточная намагниченность  .
.
Зная коэрцитивную силу, нетрудно найти из выражения магнитную проницаемость μ магнита.
Рассмотрим моделирование призматических двухполюсных магнитов. Такой вид магнитов является одним из распространенных, так как имеет относительно простую конструкцию и широкий спектр применения.
I II
Рис. 1. Картина магнитного поля призматического двухполюсного магнита, при использовании двух видов условий
(I - при помощи задания свойств материала, II - задача Неймана)
На рис. 1 представлены картины магнитных силовых линий призматического магнита для двух способов моделирования. Картины поля абсолютно одинаковы, поэтому делаем вывод, что для данного вида магнита способ его задания в модели не влияет на конечный результат.
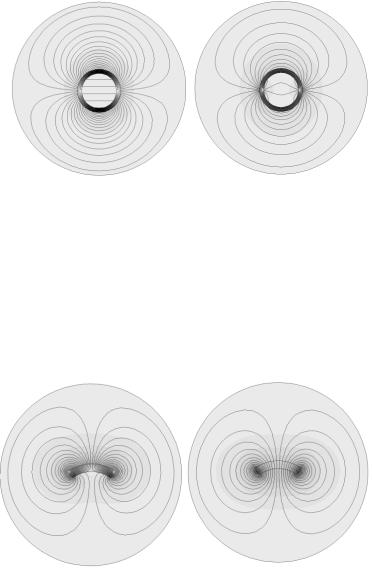
На рис. 2 представлены картины магнитных силовых линий кольцевых двухполюсных магнитов.
64
I II
Рис. 2. Картина магнитного поля кольцевого двухполюсного магнита
Рассмотрев рис. 2, сделаем вывод: применение задачи Неймана при моделировании кольцевых магнитов позволяет получить правильный результат. Очевидно, что результат ее решения говорит об уместном способе задания граничных условий, так как она учитывает потоки рассеяния внутри кольца.
Рассмотрим моделирование сегментных магнитов (рис. 3).
I II
Рис.3. Картина магнитного поля сегментного двухполюсного магнита
Исходя из результата опыта, изображенного на рис. 3, следует
65

отметить геометрическое расположение средней магнитной линии в теле магнита. Как видно для первого случая (I) - это прямая, для второго (II) – дуга, повторяющая контур границы. Проанализировав решение, содержащее среднюю линию в виде дуги, мы получим верное представление о распределении силовых линий магнитного поля.
Моделирование кольцевых многополюсных магнитов – особый случай. На рис. 4 представлена картина магнитных силовых линий четырёхполюсного кольцевого магнита. Кольцевые магниты, имеющие число полюсов большее двух, наиболее часто используются в электромашиностроении, например, в микромашинах специального назначения.
Рис. 4. Картина магнитного поля кольцевого четырех полюсного магнита
На картине поля (Рис. 4) видно отсутствие альтернативного решения задачи Неймана, что говорит о необходимости использования граничных условий второго рода для моделирования постоянных магнитов, имеющих многополюсное намагничивание, в CAE системе Elcut.
При проектировании устройств малой мощности на этапе моделирования знания о наиболее верном использовании различных граничных условий может заметно снизить конечную погрешность.
Воронежский государственный технический университет
66
УДК 621.313
П.А. Агарков, С.А. Горемыкин
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК БАЛАНСИРОВОЧНОГО СТАНКА АТМ-001Х
Приведена информация о проверке характеристик оборудования для прецизионной балансировки роторов гироскопов на станке АТМ-001Х
В настоящее время существует необходимость в повышении точности используемого оборудования на производстве. На первый план начинают выходить специальные электрические машины. Это обусловлено появлением различных исполнительных механизмов, используемых в специальной технике. При изготовлении качественных электрических машин одной из важнейших операций является балансировка ротора. Универсальный балансировочный станок АТМ-001Х для динамической балансировки роторов гиромоторов и других специальных машин фирмы изготовителя АКРОН-3 имеет ряд преимуществ. При относительно невысокой стоимости он имеет возможность находить малые значения дисбаланса при высоких частотах вращения ротора. На базовом предприятии была поставлена задача проверить технологические характеристики нового станка и подготовить его для ввода в
эксплуатацию.
Рассмотрим на примере станка АТМ-001Х требования к динамической балансировке роторов малой массы. В таблице приведены технические характеристики станка.
Технические характеристики станка
Основные технические характеристики |
АТМ- |
|
001Х |
|
|
Максимальная масса ротора, кг |
0,5 |
Максимальная нагрузка на одну опору, кг |
0,3 |
Максимальный диаметр ротора, мм |
100 |
Порог чувствительности станка (мин. достижимый |
0,05 |
остаточный удельный дисбаланс), г´мм/кг |
|
Скорость вращения при балансировке, об/мин |
300.60000 |
|
|
67 |
|
Станок позволяет отслеживать динамические изменения сигналов, поступающих от датчиков стоек и датчика метки. Сигнал от стоек механическим способом (через упругий контур) передается торсионом, жестко закрепленный с контуром. На торсионе закреплен постоянный магнит. Имея внешнее возмущение от перемещения стоек, переменный магнитный поток во времени, индуцирует в обмотке датчика ЭДС, которая поступает на усилитель сигнала. Для достижения поставленных задач по балансировке роторов малой массы часто приходится учитывать параметры микроклимата в помещении, а также частоты внешних вибраций. При динамической балансировке следует выбирать частоту вращения ротора, отличную от собственной резонансной частоты всей системы.
Порядок работы на станке АТМ-001Х:
1.Подключить станок в сеть переменного напряжения 220 В.
2.Запустить необходимое ПО.
3.Установить ротор на оправку для балансировки.
4.Установить оправку с ротором на механический контур. Законтрить вертикальное передвижение оправки двумя прижимами.
5.Нанести на ротор светопоглощающую ленту или черный след маркера.
6.Выставить датчик метки, используя осциллограф. 7.Запустить двигатель (оправка имеет рабочую обмотку). 8.Используя показания станка, найти место для удаления
материала, стрелки положительным направлением против часовой. Коррекцию производить в двух плоскостях одновременно.
9. Снять оправку со станка. Удалить или добавить материал по требованию чертежа, используя показания станка.
Приведенный порядок действий, при эксплуатации, является наиболее оптимальным. Результатом исследований является внедрение станка в производство базового предприятия. Одним из роторов, проверенных на данном станке являлся ротор гиромотора с остаточным дисбалансом равным 0.8 г·мм.
Воронежский государственный технический университет
68

УДК.621.313
Р.Ю. Плетнев, О.Г. Левина
АНАЛИЗ НЕКОТОРЫХ ХАРАКТЕРИСТИК И ПАРАМЕТРОВ ШАГОВЫХ ДВИГАТЕЛЕЙ
Рассмотрены некоторые способы форсирования тока в обмотке шагового двигателя с целью повышения его быстродействия
Среди разнообразия используемых в промышленности электрических машин отдельное место занимают шаговые двигатели (ШД). Их области применения разнообразны. Станки с ЧПУ, привода с дискретным управлением, запись и воспроизведение информации и мн. др. Основной особенностью ШД является то, что дискретный сигнал (импульс тока), подаваемый на обмотку, преобразуется в перемещение ротора на определенный угол (единичный шаг м). Поэтому угол поворота ротора ШД всегда соответствует числу поданных импульсов тока. Второй важной характеристикой ШД является максимальный статический момент, развиваемый на валу. Его можно оценить, запитав обмотку постоянным током. Перечисленные параметры
ШД относят к его статическимf |
|
|
|||||
характеристикам. |
|
|
|
|
|||
Важным |
параметром |
ШД |
|
|
|||
является скорость отработки сигнала. |
|
|
|||||
Она |
оценивается |
|
частотой |
|
|
||
приемистости (fпр), которой называют |
|
|
|||||
максимальную |
частоту |
импульсов |
|
|
|||
управления, при которой число |
|
|
|||||
отработанных |
шагов |
точно |
|
М |
|||
соответствует |
числу |
поступивших |
|
||||
|
|
||||||
импульсов |
тока. Приемистость ШД |
Зависимость частоты |
|||||
зависит от величины нагрузки на валу, |
|||||||
приемистости ШД от |
|||||||
причем, |
с увеличением |
нагрузки |
нагрузки на валу |
||||
приемистость |
падает. |
Эта |
|||||
|
|
||||||
закономерность определяется механической характеристикой ШД, показанной на рисунке сплошной линией в виде падающей кривой. С увеличением частоты импульсов приемистость ШД падает.
69
Повышение приемистости ШД под нагрузкой - актуальная задача, от её решения зависит производительность оборудования или быстродействие информационных систем, где используется ШД. Нами установлено, что быстродействие ШД зависит, в основном, от момента инерции всех вращаемых ротором частей, приведенного к оси вала, и от постоянной времени электрических цепей, представленных, в основном, обмоткой двигателя.Уменьшение маховой массы вращающихся частей привода – задача, которая решается в основном конструкторскими приемами, учитывающими физические свойства материалов и геометрию деталей [1]. Постоянная времени электрических цепей может быть уменьшена выбором только их конфигурации и параметров. Задача решается несколькими способами: выбор последовательности коммутации обмоток ШД, включением в цепь обмотки «форсирующих» сопротивлений, использованием «вольтодобавки» (повышение напряжения в начале импульса), применением регулирования тока в импульсе широтноимпульсным методом. Практика показывает, что перечисленные решения всегда приводят к снижению КПД и надежности привода.
Имеется предложение форсировать ток в обмотке ШД на основе явления, относящегося к переходным процессам с некорректными начальными условиями. Включение индуктивности в цепь питания ШД позволяет придать источнику энергии свойства источника тока. Анализ показывает, что при подборе оптимальной индуктивности может быть достигнуто практически мгновенное нарастание тока в обмотке ШД. Длительность переднего фронта импульса тока в этом случае будет определяться лишь динамическими характеристиками коммутирующего ключа. Эксперимент подтвердил, что в этом случае приёмистость ШД заметно возрастает без дополнительных затрат энергии (пунктирная линия на рисунке).. Этот прием наиболее эффективен при поочередном подключении фаз ШД с источнику.
Литература 1. Б.А. Ивоботенко, В.Ф. Казаченко, Проектирование
шагового электропривода \\ Уч. пос. МЭИ, Москва, 1985г.
Воронежский государственный технический университет
70