

Прикладные задачи электромеханики, энергетики, электроники: труды Всерос. студенческой науч.-техн. конф
.pdfнапряжения каждого источника устанавливается численно равной величине МДС соответствующей катушки, т.е. I1W1 и I2W2 .
Рис. 2. Модель разветвленной магнитной цепи
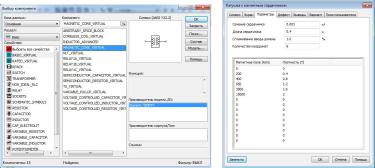
Вкачестве нелинейных элементов Rm1, Rm2, Rm3 , указанных на схеме замещения (рис.1,б) и соответствующих каждому ферромагнитному участку магнитной цепи (рис.1,а), используется имеющийся в библиотеке Multisim [4] виртуальный магнитный элемент (Magnetic _ Core_ Virtual), расположенный: «Пассивные компоненты»→ «Basic_ Virtuai»→ «Magnetic_Core_Virtual» (рис.3,а).
Вдиалоговом окне каждого из выбранных магнитных элементов (рис.3,б) необходимо ввести геометрические параметры,
соответствующего участка, т. е. площадь поперечного сечения сердечника (м2): S1, S2 и S3 и длину средней магнитной силовой линии (м): l1, l2 и l3. В строке «Сглаживание ввода домена» указать значение, равное 1%, а в строку «Количество координат» ввести число координатных точек кривой намагничивания B(H) материала сердечника.
Вэтом же окне в столбик «Магнитное поле (A/m)» заносятся все заданные значения напряженности магнитного поля H, а в столбик «Плотность (Т)» – соответствующие им значения магнитной индукции
В.
21
а) б)
Рис. 3. Диалоговые окна выбора виртуального магнитного элемента (а) и установки его параметров (б)
В модели (рис.2) воздушный зазор представляется резистором Rmв с сопротивлением, равным магнитному сопротивлению воздушного зазора, определяемого из [2] по выражению
Rmâ |
lâ |
|
|
1 |
||
4 10 |
7 |
|
|
|
|
|
|
|
Sâ |
Ãí |
|||
Для магнитной цепи (рис.1,а) при значениях длины воздушного зазора lв=0,009 м и площади его сечения Sв=S2=0,003 м2 магнитное сопротивление воздушного зазора составило Rmв=2387 ком.
Для измерения магнитных потоков Ф1, Ф2 и Ф3 используются, включенные в каждый участок цепи, амперметры А (режим DC, внутреннее сопротивление – 1 мОм), а для измерения магнитного напряжения Umab между узлами «а» и «b» магнитной цепи – вольтметр V (режим DC, внутреннее сопротивление – 1 ГОм).
Для рассматриваемой магнитной цепи (рис.1) на основании аппроксимации кривой намагничивания выполнен расчет с применением MathCad. Результаты расчета представлены на рис. 4. Сравнение результатов моделирования и расчетов показало их совпадение. При этом моделирование ускоряет процесс анализа и делает его более наглядным.
22

Рис. 4. Фрагмент MathCad документа расчета магнитных потоков аналитическим методом
Приведенная методика моделирования магнитных цепей позволяет получить характеристику зависимости магнитной индукции в зазоре магнитной цепи от изменения токов в катушках источников МДС и определять диапазон допустимых значений токов, в пределах которого находится необходимая величина магнитной индукции в воздушном зазоре.
Литература
1.Шалягин Д.В. Устройства железнодорожной автоматики, телемеханики и связи: учебник для вузов [Текст] / Д.В. Шляпин, Н.А. Цыбуля. – М.: Маршрут, 2006. – 587 с.
2.Бессонов Л.А. Теоретические основы электротехники. Электрические цепи [Текст] / Л.А. Бессонов. – 11-е изд., перераб. и
доп. – М.: Гардарики, 2006. – 701 с.
3. Загидуллин Р.Ш. Multisim, LabVIEW и Signal Express.
Практика автоматизированного проектирования электронных устройств [Текст] / Р.Ш. Загидуллин. – М.:Горячая линия-Телеком, 2009. – 366 с.
4. Марченко А.Л. Лабораторный практикум по электротехнике и электронике в среде Multisim: учеб. пособие для вузов [Текст] / А.Л. Марченко, С.В. Освальд. – М.: ДМК Пресс, 2010. – 448 с.
Московский государственный университет путей сообщения (Воронежский филиал МИИТ)
23
УДК 621.313
Д.А. Ашарапова, Р.О. Нюхин РАСЧЕТ НАДЕЖНОСТИ ЛИНЕЙНОГО ЭЛЕКТРОПРИВОДА
Определена вероятности безотказной работы вентильного безредукторного линейного электропривода
Ключевые слова: электропривод, надежность, линейный электродвигатель
Электропривод предназначен для применения в следящих высокоточных электроприводах, многочисленных устройствах автоматики.
Электропривод относится к невосстанавливаемым системам. Требования по надежности:
−требования надежности устанавливаются в соответствии с ГОСТ РВ 20.39.413-97;
−вероятность безотказной работы электропривода должна быть не менее 0,95 на время штатной работы 25000 ч.
Расчет производится при следующих допущениях:
а) отказы элементов являются событиями случайными и независимыми;
б) учитываются только элементы, входящие в основную функциональную схему работы изделия;
в) вероятность безотказной работы элементов изменяется от времени по экспоненциальному закону, т.е. опасность отказов (λi) не зависит от времени;
г) учет влияния условий работы производится приближенно; д) параметрические отказы отдельно не учитываются.
Для основного функционального соединения элементов в изделии надежность ВП:
N |
|
|
Р(t) Pi (t); |
|
(1) |
i 1 |
|
|
P(t) e it |
, |
(2) |
i |
|
|
где λi – интенсивность отказов, 1/ч.
t – время работы изделия ( 25000), ч.
24
Электропривод состоит из двух основных узлов: линейного
электродвигателя и микроконтроллерного устройства |
цифрового |
управления, надежность которых соответственно РД и РМ. |
|
Надежность электропривода: |
|
РД = РД ·РМ. |
(3) |
Расчет надежности линейного электродвигателя.
С учетом сложившейся практики использования синхронных двигателей с постоянными магнитами интенсивность отказов линейного двигателя примем 0,11·10-6 1/ч.
Учет влияния условий эксплуатации изделия в ориентировочном расчете производится с помощью поправочного коэффициента Кλ. Величина интенсивности отказов компонента:
j |
j0K , |
(4) |
где λj0 – интенсивность отказов при работе изделия в стационарной наземной аппаратуре.
Кλ = 3.
j 0,11 10 6 3 0,33 10 6 1/ч.
PД (t ) e 0,3310 6 25000 0,9956.
Расчет надежности микроконтроллерного устройства цифрового управления
Микроконтроллерное устройство цифрового управления в своем составе содержит ni количество компонентов, соответственно:
|
ni |
|
i |
j , |
(5) |
j 1
где λj – интенсивность отказа отдельного компонента. Эксплуатационная интенсивность отказов для примененной
номенклатуры компонентов представлена в таблице. Вероятность безотказной работы:
РМ е 1.7454610 6 25000 0.9573
Вероятность безотказной работы электропривода на время штатной работы 25 000 ч:
Р = 0,9959·0.95719 = 0,9525.
Таблица
25
Компоненты |
Количе |
Интенсив |
Интенсивно |
Интенсивно |
|
ство, ni |
ность |
сть отказов |
сть отказов |
|
|
отказов |
компонента |
λi·10-6 1/ч |
|
|
λj0·10-6 1/ч |
λj·10-6 1/ч |
|
Транзисторы |
11 |
0,00484 |
0,01452 |
0.15972 |
Диоды |
28 |
0,00324 |
0,0972 |
0.27216 |
Микросхемы |
17 |
0,00056 |
0,00168 |
0.02856 |
Резисторы |
130 |
0,001212 |
0,003636 |
0,047268 |
Конденсаторы |
70 |
0,01162 |
0,03486 |
0,024402 |
Соединители |
22 |
0,004725 |
0,014175 |
0.31185 |
Дроссели |
3 |
0,007 |
0,021 |
0.0063 |
Соединения |
746 |
0,0007 |
0,0021 |
|
пайкой |
|
|
|
0,8952 |
ИТОГО |
|
|
|
1.74546 |
λi =1.74546 ·10-61/ч – интенсивность отказов микроконтроллерного устройства цифрового управления.
Перечень сокращений
Р(t) – вероятность безотказной работы линейного электропривода
РД(t) – вероятность безотказной работы линейного двигателя РМ(t)– вероятность безотказной работы микроконтроллерного
регулятора вектора
λi – интенсивность отказов t – время работы изделия
λj0 – интенсивность отказов при работе изделия в стационарной наземной аппаратуре
Кλ – поправочный коэффициент
λj – величина интенсивности отказов компонента
Воронежский государственный технический университет
26
УДК 621.313
Д.Э. Штень, Т.Е. Черных
АНАЛИЗ КРИВОЙ ИНДУКЦИИ В ВОЗДУШНОМ ЗАЗОРЕ АСИНХРОННОГО ДВИГАТЕЛЯ С ВНЕШНИМ РОТОРОМ ПРИ ИСПОЛЬЗОВАНИИ СОВМЕЩЕННОЙ И КЛАССИЧЕСКОЙ ОБМОТОК
Рассматривается применение совмещенной обмотки в асинхронных двигателях с внешним ротором
Ключевые слова: асинхронный двигатель, совмещенная обмотка
В России на долю асинхронных двигателей приходится более 50% потребления всей вырабатываемой энергии. В промышленности эта цифра составляет более 60%, а в системах водоснабжения до 90%. Большинство технологических процессов осуществляется именно асинхронными двигателями во многих сферах жизнедеятельности человека. Появление двигателей с совмещенными обмотками дает возможность улучшения параметров асинхронных двигателей без увеличения себестоимости.
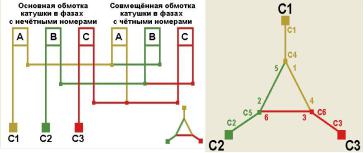
На рисунке 1 представлена схема соединения катушек совмещенной обмотки.
Рис. 1
В зависимости от схемы подключения трехфазной нагрузки к трехфазной сети (звезда или треугольник) можно получить две системы токов, образующих между векторами индукции магнитных потоков угол в 30 электрических градусов. Соответственно, к
27
трехфазной сети можно подключить двигатель, имеющий не трехфазную обмотку, а шестифазную. При этом часть обмотки должна быть включена в звезду, а часть в треугольник и результирующие вектора индукции полюсов одноименных фаз звезды и треугольника должны образовывать между собой угол в 30 электрических градусов.
Для дальнейшего исследования был выбран асинхронный двигатель со следующими параметрами:
–внешний диаметр статора: 121 мм
–внешний диаметр ротора: 168 мм
–номинальная мощность: 2 кВт
–высота оси вращения: 100 мм
–частота вращения: 1000 об/мин
–число пар полюсов: 2p = 6
–число пазов статора: 36.
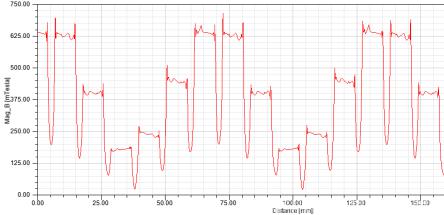
При моделировании были получены следующие графики: График кривой индукции в воздушном зазоре создаваемой
обмоткой статора двигателя с совмещенной обмоткой представлен на рисунке 2.
Рис. 2.
График кривой индукции в воздушном зазоре создаваемой обмоткой статора двигателя с классической обмоткой представлен на рисунке 3.
28
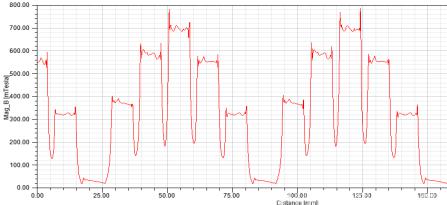
Рис. 3.
Анализируя представленные графики, можно сделать вывод, что применение совмещенной обмотки в асинхронных двигателях с внешним ротором позволяет уменьшить уровень магнитной индукции полей от нечетных гармоник, за счет перераспределения электромагнитного поля в воздушном зазоре, что зачастую приводит к снижению добавочных потерь в частях магнитопровода электродвигателя.
Литература 1. Копылов И.П. Проектирование электрических машин [Текст]:
учебник для вузов / Под ред. И.П. Копылова. – 4-е изд., перераб. и доп.
– М.: Юрайт, 2011. – 767 с.
Воронежский государственный технический университет
29
УДК 621.313
А.И. Нефедов, Я.С. Шаповалов, А.Ю.Писаревский
ОБЗОР ВОЗМОЖНОСТИ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК ВЫСОКОДИНАМИЧНОГО ЭЛЕКТРОПРИВОДА
Рассматривается один из способов улучшения характеристик высоко динамичного электропривода, путем замены якоря стандартной зубцовой конструкции на гладкий якорь беззубцового типа
Ключевые слова: двигатель постоянного тока, беззубцовая конструкция
якоря
В настоящее время для электромашиностроительных предприятий предъявляются качественно новые высокие требования в области создания специальных высоко динамичных электроприводов. Характеристики электропривода определяются в первую очередь характеристиками исполнительного двигателя.
Помимо общих требований (малые габариты и вес, дешевизна, высокий КПД, надежность, бесшумность, отсутствие радиопомех и т.д.), к исполнительным электродвигателям предъявляются и специфические требования, связанных в первую очередь с управляемостью.
1.Электродвигатели (ЭД), применяемые в электроприводе, должны иметь плавную регулировку скорости в широких пределах.
2.Режим работы ЭД должен быть устойчивым во всем рабочем диапазоне угловых скоростей. Под устойчивостью подразумевается способность двигателя восстанавливать установившуюся скорость вращения при небольших кратковременных возмущающих воздействиях (по питающей сети, по моменту нагрузки).
3.Возможность реверсирования.
4.Мощность управления должна быть малой при значительной мощности на валу.
5.Электропривод должен обладать высоким быстродействием, т.е. малым временем отработки сигнала.
6.Хорошие пусковые свойства: малый момент трогания, высокая кратность пускового момента и малая кратность пускового тока.
Требования к характеристикам:
1.Высокая степень линейности механической характеристики;
30