

Прикладные задачи электромеханики, энергетики, электроники: труды Всероссийской студенческой научно-технической конференции. Шелякин В.П
.pdfзаменить другими, более совершенными, с лучшими характеристиками.
Для проведения унификации СЭМО необходимо знать:
виды объектов унификации и характеристики уже используемых, проектируемых и предполагаемых к реализации объектов;
основные направления процесса унификации; необходимость применения данных образцов СЭМО;
требуемую эффективность разработок, их технический уровень и исходные данные для реализации этого.
Кроме того необходимо учитывать возможность изготовления образцов на промышленных предприятиях
При проведении унификации:
определяют группы похожих объектов СЭМО и их типы; для этих объектов выбирают направления унификации и
возможные варианты их решения; по результатам предыдущих этапов определяют лучшие варианты
унификации, типы и характеристики образцов.
При этом для всех этапов унификации необходимо разработать подробные методики, позволяющие определить параметры этапов с достаточно высокой точностью и достоверностью.
В процессе унификации выбирается такой вариант, который обеспечивал бы максимум технико-экономических показателей с учетом требуемого технического уровня и объемов финансирования.
Однако при замене отдельных частей изделия на более совершенные возникают дополнительные затраты.
Экономический эффект от внедрения данных мероприятий можно рассчитать, используя методику [4].
Литература
1. L N Titova, U A Pertsev, S A Samodurova and P O Nuhin. Development of an evaluation method for electromechanical systems unification. Published 1 March 2020 • Published under license by IOP
Publishing Ltd IOP Conference Series: Materials Science and Engineering, Volume 791, IV International Scientific and Technical Conference "Energy Systems" 31 October – 1 November 2019, Belgorod, Russia
21
2.Аносов Р. С., Глазунов Ю. М., Перцев Ю. А. Постановка задачи системной унификации энергетических систем // Энергия – XXI век. 2017. № 3 (99). С. 17–24.
3.Перцев Ю.А., Титова Л.Н., Зеленская С.Г. Оценка унификации электромеханических систем // Новые технологии в научных исследованиях, проектировании, управлении, производстве: труды Междунар. науч.-техн. конф., посвященной памяти д.т.н., профессора Зайцева Александра Ивановича. --Воронеж: Из-во ВГТУ, 2019. С. 369373.
3. Аносов Р. С., Глазунов Ю. М., Зеленская С. Г. Методика оценки технико-экономического эффекта от реализации вариантов унификации энергетических систем // Энергия – XXI век. 2017. № 4 (100). С. 86–91.
Воронежский государственный технический университет ВУНЦ ВВС ВВА им. профессора Н. Е. Жуковского
и Ю. А. Гагарина
22
УДК 004.942
Д.Р. Черкасов, Т.Е. Черных, А.В. Тикунов
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ЭЛЕКТРОМЕХАНИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ
Рассматриваются методы математического моделирования электромеханических преобразователей классических конструкций.
Ключевые слова: электромеханическая система, имитационное моделирование, численные методы моделирования.
За последнее десятилетие в области электромеханики и электроэнергетики появилось огромное количество сложных высокоорганизованных систем кибернетического типа, которые решают вопросы выработки и распределения энергии, а также управления этими процессами. Для конструирования, проектирования и эксплуатации таких систем необходимо решать ряд задач, которые во многом связаны с методами исследования процессов, происходящих в них. Особенно актуальными являются вопросы исследования переходных процессов, оптимизационных расчетов, расчетов установившихся режимов, происходящих в электромеханических и электроэнергетических системах.
На сегодняшний день для исследования подобных систем и входящих в их состав сложно-структурированных объектов, как правило, используется аппарат математического моделирования. Необходимость моделирования подобных нестандартных объектов и систем обусловлена многими факторами, одним из которых является невозможность создания достаточного количества эмпирических режимов, необходимых для корректного анализа исследуемых систем. Чаще всего невозможность проведения подобных экспериментов связана с отсутствием необходимой технической базы, а также экономической нецелесообразностью подобных опытов.
За весь период развития моделирования наработаны огромные массивы статистических данных о режимах работы многоэлементых структур, созданы обобщенные математические модели их элементов, а также разработаны методы исследования и численной оптимизации систем в целом и их элементов по отдельности [1].
В большинстве случаев при моделировании электромеханических систем за основу используют обобщенную математическую модель, а также численные методы расчета физических полей (электрических,
23

тепловых, магнитных и т.д.). Такой подход к моделированию обусловлен тем, что все виды полей в сложных системах, влияют на сроки эксплуатации этих систем и определяют рабочие свойства интегрированных в их состав объектов. Именно численное моделирование позволяет с гарантированной сходимостью определить необходимые параметры сложно-структурированных объектов на основе метода конечных элементов. Для таких нестандартных объектов необходима повышенная детализация математических моделей, за основу которых взяты универсальные электромеханические системы со строго формализованными численными моделями.
Более эффективным методом моделирования электромеханических систем на сегодняшний день принято считать метод конечных элементов, в основу которого положены универсальные уравнения Максвелла. С помощью этих уравнений одновременно можно рассчитать и магнитную индукцию и другие характеристики поля во времени и пространстве. Однако, для исследования динамических режимов, протекающих в подобных системах, необходимо использовать уравнения Ньютона, а для вычисления токов и напряжений – уравнения Кирхгофа. Совокупность множества алгебраических уравнений дает более точную картину исследуемых полей.
Многие программные комплексы, позволяющие исследовать электромагнитные поля электромеханических систем, такие как Ansys, Maxwell, Elcut и др., используют уравнения Максвелла, приведенные к следующему виду:
|
|
|
|
|
|
|
|
|
|
|
(1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
|
– оператор ротора; |
|
|
– оператор дивергенции; |
H – |
|||||
вектор напряженности магнитного поля; j – общий вектор плотности тока; js – вектор плотности тока источника; je – наведенный вектор плотности вихревого тока; jv – вектор плотности тока скорости;
D – вектор электрической индукции; |
E – вектор напряженности |
|
электрического поля; B – вектор магнитной индукции; |
– плотность |
|
электрического заряда.
Эти уравнения позволяют решать задачи исследования электромагнитного поля в конечной области пространства при
24
определенных начальных и заданных граничных условиях.
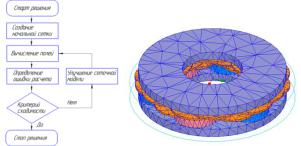
Полученная система алгебраических уравнений, дает единственное верное решение, коррелируемое с вычислением неизвестных коэффициентов. Так как сложно-структурированные объекты не являются универсальными, следовательно задача должна рассматриваться в трехмерной постановке, а геометрия разбивается на четырехгранные элементы. Полученная объемная модель объединяется в цельную сеточную структуру и при дискретизации пространства образуется матрица уравнений, а при трехмерной постановке задачи для каждого тетраэдра, образующего конечно-элементную сетку, определяется величина поля, для межреберных узлов и узлов в вершинах тетраэдра.
На рисунке 1 представлен алгоритм улучшения сеточной модели и готовая сетка для исследования нестандартных сложноструктурированных объектов.
Рис. 1
Для разработки математического аппарата моделирования нестандартных сложно-структурированных объектов было принято решение в качестве объекта исследования принять дисковый электромеханический преобразователь [2].
В основу его математического описания были положены классические уравнения Парка-Горева с допущением, что дисковый и цилиндрический преобразователи в математическом выражении эквивалентны, а разница заключается в потоках рассеивания, которые обуславливают индуктивность катушек [3]. Числовые значения этих параметров используются в математической модели в виде коэффициентов.
После преобразований система уравнений, описывающая
25
дисковый сложно-структурированный объект, может быть представлена в виде:
d |
ia (t) |
ua (t) RS |
ia (t) m r (t) p sin( (t)) |
|
|
||||
dt |
|
|
|
LS 0,5 Lm |
|
||||
|
|
|
|
|
|
||||
d |
|
|
ub (t) RS |
ib |
(t) m r (t) p sin( (t) 120 ) |
(2) |
|||
dt ib (t) |
|
|
|
LS 0,5 Lm |
|||||
|
|
|
|
||||||
d |
ic (t) |
uc (t) RS |
ia (t) m r (t) p sin( (t) 120 ) |
|
|||||
dt |
|
|
|
LS 0,5 Lm |
|
||||
|
|
|
|
|
|
||||
d |
r (t) |
M C M Э ( ia (t),ib (t),ic (t), (t)) Fтр r (t) |
|
|
|||||
dt |
|
|
|||||||
|
|
|
|
|
J |
|
|||
d |
(t) p r (t) |
|
|
|
|
|
|||
dt |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
Представленная система уравнений позволяет учитывает размагничивание магнита за счёт реакции якоря, поля рассеяния магнита, колебания индуктивности рассеяния катушек, а также взаимоиндуктивности из-за явнополюсной конструкции моделируемой машины.
Решив полученную систему уравнений методом Рунге-Кутты получаем графическое решение системы дискового сложноструктурированного объекта представленное на рисунке 2, а.
Для проверки полученных результатов было принято решение провести моделирование магнитного поля на основе конечноэлементного метода. Результатом эксперимента стали графические зависимости величин токов и напряжения в динамическом режиме исследуемого объекта (рисунок 2, б).
Таким образом, проведя анализ результатов использования численных методов для решения поставленной задачи, заключающейся в исследовании нестандартных сложно-структурированных объектов, на примере дискового электромеханического преобразователя, можно сделать следующий вывод:
– полученные графические интерпретации динамических процессов, происходящих в дисковой сложно-структурированной модели, являются абсолютно идентичными друг другу, что говорит об эффективности метода конечных элементов, реализуемого в программных комплексах для трехмерной постановки задачи.
26
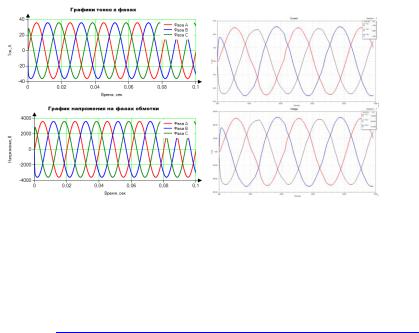
а) б)
Рис. 2. Графические зависимости токов и напряжения
Литература
1.Обобщенная электрическая машина и обобщенный электромеханический преобразователь // Электротехника / И.П. Копылов Издательство: Фирма Знак (Москва) №2. 2008. С 50-54
2.Генератор для ветроэнергетической установки вертикального исполнения / Писаревский А.Ю., Черных Т.Е., Тикунов А.В / Вестник Воронежского государственного технического университета. 2018. Т. 14. № 6. С. 49-60.
3.Моделирование синхронного генератора прямого привода для вертикально-осевой ветроэнергетической установки Черных Т.Е., Белозоров С.А., Тикунов А.В. Электротехнические комплексы и системы управления. 2015. № 4. С. 34-37.
Воронежский государственный технический университет
27

УДК 62-83:621.313
В.В. Благов, А.Д. Булатов, М.А. Чесноков, А.К. Муконин
ВАРИАНТЫ ПОСТРОЕНИЯ ЧАСТОТНЫХ ЭЛЕКТРОПРИВОДОВ
Рассмотрены схемы электропривода с трехфазным двигателем, питаемым от двух регулируемых источников напряжения. Описываемое решение позволяет упростить преобразовательное устройство.
Ключевые слова: трехфазный двигатель, преобразователь частоты, частотный электропривод.
Вчастотном электроприводе преобразовательное устройство (ПУ)
взависимости от напряжения питания является либо преобразователем частоты (ПЧ), либо автономным инвертором напряжения (АИН). В работе рассматриваются возможности применения в частотном приводе преобразовательного устройства с нетрадиционной структурой, представляющей собой совокупность двух регулируемых источников напряжения (РИН) с общим выводом [1].
Схемы питания трехфазной обмотки от двух РИН приведены на
(Рис. 1).
Рис. 1. Схемы подключения трехфазной обмотки
На (Рис. 1) регулируемые источники напряжения с общим выводом ОВ обозначены как РИН1, РИН2, фазы трехфазной обмотки -  -
- , выходные выводы ПУ - a, b, c. Место включения измерителей
, выходные выводы ПУ - a, b, c. Место включения измерителей
тока ИТ1, ИТ2, показанное на (Рис. 1, а), позволяет использовать датчики без гальванического разделения входа и выхода.
Выходные напряжения |
и |
блоков РИН1, РИН2, |
пропорциональные сигналам |
, |
, сдвинуты на 60 : |
28

В таком случае линейные напряжения трехфазной обмотки являются трехфазной симметричной системой гармоник:
Изменяя |
и |
, можно управлять трехфазным двигателем. |
Реверс двигателя обеспечивается сдвигом фаз между  и
и  не +60
не +60 а - 60
а - 60 .
.
За счет применения приведенных на (Рис. 1) схем питания можно упростить преобразовательную часть привода.
Вначале рассмотрим возможность улучшения преобразователя частоты с непосредственной связью (ПЧНС). В приводе с трехфазным двигателем ПЧНС обычно состоит из трех РИН, питающих соответствующую фазу двигателя. Каждый из РИН является реверсивным тиристорным преобразователем (выпрямителем). Для реализации ПЧНС в виде схем на (Рис. 1) можно использовать два реверсивных тиристорных выпрямителя с общим выводом. Такие выпрямители выполняются по трехфазной нулевой схеме. Очевидно, что применение не трех, а двух тиристорных выпрямителей упрощает преобразователь.
Рассмотрим теперь возможность упрощения автономного инвертора напряжения. В классических приводах с трехфазным двигателем применяется трехфазный мостовой автономный инвертор напряжения (ТМАИН), содержащий шесть транзисторных ключей. Схема ПУ, выполненная в соответствии с (Рис. 1), может быть реализована как более простой двухфазный нулевой автономный инвертор напряжения (ДНАИН), который содержит четыре транзисторных ключа[1].
В частотных приводах широко применяются преобразователи частоты с промежуточным звеном постоянного напряжения (ПЧ с ПЗПН), структура которых выполняется в соответствии с (Рис. 2).
Рис. 2. Обобщенная схема ПЧ с ПЗПН
29

Схема включает в себя следующие блоки: ДК - диодный комплект, преобразующий переменное напряжение в постоянное; Ф1 - фильтр; М1 - двигатель переменного тока.
Конкретные варианты ПЧ могут различаться схемами выделенных на (Рис. 2) блоков. Выбор рациональной схемы ПЧ зависит, в частности, от показателей влияния на питающую сеть. К таким показателям относят коэффициент мощности kм, амплитудные и действующие значения токов сети.
Рассмотрим соотношения для одной фазы питающей сети. Мгновенная мощность фаз сети:
где u(t) и i(t) – мгновенные ток и напряжение. Активная мощность, потребляемая от фаз сети:
где Т – период сетевого напряжения. Коэффициент мощности:
где S –полная мощность.
Значение S можно выразить через ее составляющие:
где Q и T– реактивная мощность и мощность искажения соответственно.
В преобразователях с емкостным фильтром составляющая T весьма велика, что снижает  .
.
Величину S можно определить по формуле:
где I и U - действующие значения тока и напряжения фазы сети. Сравним влияние на сеть приводов, питающихся однофазным
напряжением и имеющих ПЧ с ПЗПН.
На (Рис. 3, а) приведена схема классического ПЧ с ПЗПН с трехфазным мостовым АИН, а на (Рис.3, б) - схема ПЧ с двухфазным нулевым АИН.
30