

3178
.pdf
|
|
|
T |
2 |
nr |
T2 |
ln |
2 |
|
J 0 |
|
|||
|
|
|
|
|
|
|
|
a |
|
Данное выражение несколько проще и удобнее в расчетах, поскольку не исключена возможность примерного равенства Т1 и Т2, в результате чего в знаменателе выражения для nr в случае линейной свертки двух экспоненци-
альных функций может возникнуть неопределенность, приводящая к незна-
чимому результату.
Таким образом, желательно линейное представление составляющих графиков.
Исходя из того, что следующую итерацию расчета по выбору nr целе-
сообразно провести, выбирая в качестве возрастающего параметра не mE, а В
- индукцию в зазоре (на один ротор), поскольку коэффициент использования kи:
kи AB
где А - линейная нагрузка.
Очевидно, что в данном случае увеличение числа роторов приводит к увеличению потокосцепления вследствие увеличения взаимной индуктив-
ности в nr раз.
Кроме того, имеются и предпосылки для увеличения площади охлаж-
дения.
При этом следует различать две тенденции А и B : уменьшение на один ротор из-за уменьшения площади и увеличения кривизны воздушного зазора и увеличения суммарных соответствующих величин, см. рис. (для серии ДПР) из-за увеличения числа роторов. Выбор оптимального числа роторов существенно осложняется тем, что орбитальные системы имеют не-
: уменьшение на один ротор из-за уменьшения площади и увеличения кривизны воздушного зазора и увеличения суммарных соответствующих величин, см. рис. (для серии ДПР) из-за увеличения числа роторов. Выбор оптимального числа роторов существенно осложняется тем, что орбитальные системы имеют не-
сколько режимов работы, и, следовательно, каждому режиму будет соответ-
ствовать свое число роторов. Вышеприведенные рассуждения и зависимо-
сти относятся к параллельному (многодвигательному) режиму. В случае со-
71
вместного режима могут быть приведены иные аргументы в пользу того или иного числа роторов. Однако, в этом случае рассматриваются уже не вращающиеся, а заторможенные роторы, являющиеся частью общего, со-
ставного ротора.
Кроме этого, возможен, также учет введения (в случае необходи-
мости) второго, внутреннего статора, который в общем случае приводит к удвоению момента, но требует увеличения числа роторов (до минимум шес-
ти при радиусе внутреннего статора, равном радиусу ротора).
72
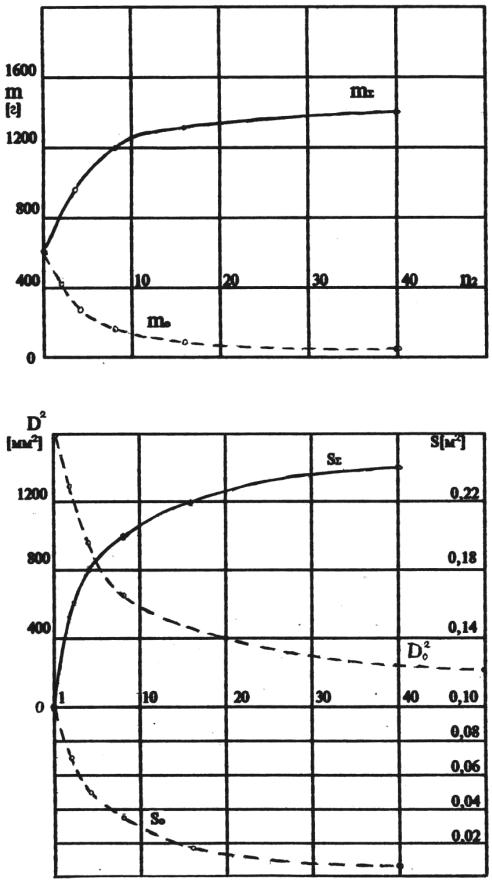
Рис. 3.1.
Рис. 3.2.
73
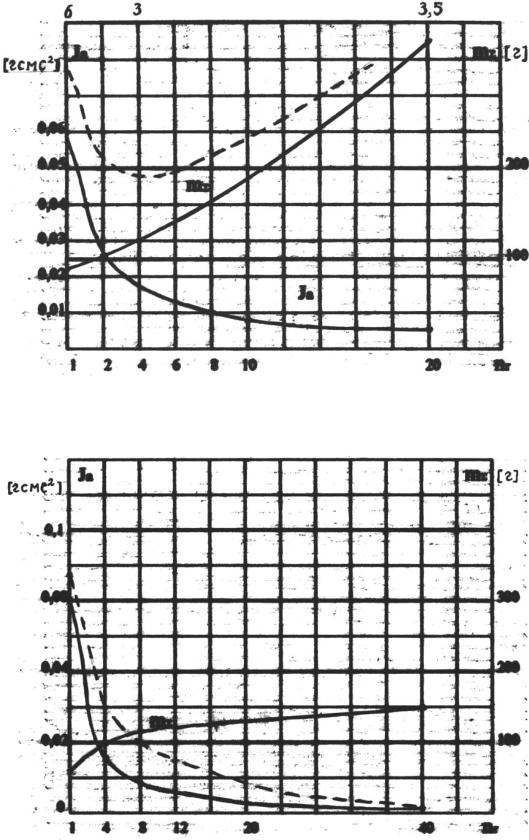
Рис. 3.3.
Рис. 3.4.
74

Рис. 3.5.
Рис. 3.6.
75
4. МОНОТОННОСТЬ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ОРБИТАЛЬНЫХ ЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМАХ.
Многие современные системы управления слабодеформированными объектами предъявляют повышенные требования как к быстродействию пе-
реходного процесса, так и к его монотонности, уменьшению, или вообще,
исключению перерегулирования. Так, например, в приводах исполнительных органов манипуляторов промышленных роботов, для предотвращения воз-
можности ударов, обеспечения невозможности выхода за пределы зоны сер-
виса, отработка траектории или заданной координаты должна производиться без перерегулирования.
Ряд новых конструктивных решений, в том числе введение внешних магнитных систем позволяет уменьшить электромеханические постоянные времени электроприводов роботов, что также увеличивает колебательность и перерегулирование, снижает демпфирование. Традиционные методы обес-
печения монотонности переходного процесса при заданном быстродействии,
такие, например, как ввод обратных связей, использование принципов оп-
тимального управления, приводит к усложнению структуры устройства управления, которое далеко не всегда оправдывается полученным резуль-
татом, зачастую приводит к снижению надежности из-за резкого увеличения числа связей и компонентов.
Цель настоящего изложения является обоснование, исследование и практическая реализация метода, позволяющего обеспечить монотонность протекания переходного процесса при заданном быстродействии в системе с инерционным слабо деформированным объектом минимум второго порядка.
Речь идет о снижении колебательности не только в пусковых режимах привода, но и с практической точки зрения более важного, обеспечения апе-
риодичности в режимах торможения привода. Этим достигается обеспече-
ние высокого качества процесса позиционирования с полным отсутствием перерегулирования при уменьшении времени регулирования.
76
Отличительной особенностью метода является то, что при неизменной замкнутой структуре, за счет введения практически только простого генера-
тора единичного импульса, монотонность обеспечивается вследствие форми-
рования особой формы сигнала на задающем входе элемента сравнения. Эта форма представляет собой сочетание обычного ступенчатого воздействия и импульса противоположного знака, сдвинутого на величину времени нарас-
тания или времени спада.
Под временем нарастания понимается абсцисса первой точки пересе-
чения исходной колебательной кривой переходного процесса при разгоне, с
уровнем установившегося значения. Под временем спада будем понимать время, соответствующее первому пересечению кривой исходной переходной колебательной характеристики при торможении, с уровнем установившегося значения. Рассмотрим реализацию метода на примере одномерного колеба-
тельного объекта. В этом случае (см.рис. ) на вход объекта подается два сиг-
нала : основное ступенчатое воздействие 1 и импульсное смещенное воздей-
ствие 3 обратного знака. Его можно получить путем дифференцирования ос-
новного воздействия или введения чистого запаздывания, но может быть ис-
пользовано и специальное устройство, структурная схема которого показана на рис. .
На входе объекта суммируются реакция 2 (см. рис. ) на ступенчатое воздействие - переходная характеристика колебательного звена и импульсная переходная характеристика 4 противоположного знака. Результирующая кривая 5 имеет незначительное перерегулирование, которое, как будет пока-
зано ниже, теоретически может вообще отсутствовать.
Устройство, реализующее данный метод (см. рис. ), содержит основной задатчик 1, основной элемент сравнения 2, регулятор 3, объект управления 4,
ключ 5 с замыкающим входом 6, основным входом 7 и размыкающим вхо-
дом 8. Имеется дополнительный элемент сравнения 9, нуль-орган 10 и ге-
нератор импульса 11.
77
Устройство, реализующее данный способ, работает следующим образом.
Исходный сигнал задания в форме скачкообразного воздействия от основно-
го задатчика 1, соединенного с системой управления, на основной сумматор
2 и далее, на объект управления 4, предварительно попадая на регулятор 3.
Одновременно сигнал задания подается на замыкающий вход 6 ключа 5 и за-
мыкает его, подключая основной вход 7 к выходу, тем самым создается цепь,
по которой сигнал задания подается на вход не только элемента 2, но и эле-
мента 9. Ключ 5 становится на замыкание и поддерживается в этой состоя-
нии. Когда выходная величина принимает заданное значение, т.е. на инверс-
ный вход элемента 9 подается заданное значение, достигнутое объектом,
срабатывает нуль-орган 10, который далее, запускает генератор импульса 11.
Импульс подается на вход регулятора и на вход 8 ключа, ключ размыкается,
задающее воздействие не подается на элемент 9, схема находится в режиме ожидания поступления нового задающего воздействия, после которого ре-
жим работы повторяется.
Таким образом, генератор импульса включается в работу после перво-
го достижения регулируемой величиной установившегося значения, т.е.
после прошествия времени нарастания. При этом, если, например, вследст-
вие изменения конфигурации руки робота, постоянная времени объекта из-
менится, все равно после нового времени нарастания, генератор импульса сработает, причем только один раз за время переходного процесса.
Таким образом, импульсное воздействие, как и основное управляющее воздействие, прикладывается к объекту, но знак этого импульсного воздейст-
вия противоположен знаку управляющего ступенчатого воздействия. Если реакция объекта на канал, составленный из блоков 1, 2, 3, характеризует кри-
вая 2 на рис . (переходная характеристика объекта, описываемого колеба-
тельным звеном), то кривая 4 (рис. ) характеризует реакцию на импульсное воздействие 3.
Поскольку кривые 2 и 4 разнонаправлены, суммарное воздействие ха-
78
рактеризуется кривой 5, реализация которой теоретически обеспечивает иде-
альную апериодичность при максимально возможном быстродействии, т.е.
минимальном времени нарастания. Уменьшение перерегулирования приво-
дит к улучшению переходного процесса, устранению возможности задевания за препятствия, что увеличивает производительность объекта. Введение клю-
ча с размыкающим входом исключает многократное формирование и при-
ложение к системе импульсного воздействия, ввода ее в режим автогенера-
ции из-за наличия небольшой колебательной составляющей, вызванной не-
идеальностью используемых элементов.
Время переходного процесса, даже при наличии остаточной колебатель-
ности, значительно сокращается. Например, при коэффициенте демп-
фирования, равном 0, l и постоянной времени, равной 1, время переходного процесса колебательного звена равно примерно 33 с при перерегулировании
73 %, а при использовании данного способа при этих же параметрах время регулирования равно 13с при перерегулировании 15%. Определим аналити-
чески основные соотношения, характеризующие данный метод.
Очевидно, что на основании принципа суперпозиции, при входном сиг-
нале Х0вх =1(t), на объект будет подаваться сигнал
X вх (t) 1(t) 1 (t ) |
(4.1) |
где:
1(t) - единичная скачкообразная функция,
1 (t) - дельта-функция,
 - время подачи импульса.
- время подачи импульса.
Выходной сигнал можно представить в виде:
h(t) hk (t) |
(t ) |
(4.2) |
где:
hк(t) - переходная функция колебательного звена,
(t- ) - смещенная импульсная функция. 79
Как известно,
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
||
hк (t) k |
1 |
e 3 / Tt |
cos |
|
|
t |
|
|
|
|
|
|
|
sin |
|
t |
(4.3) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
1 |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
T |
2 |
|
|
|
T |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
(t) |
|
|
|
|
e |
t / T sin |
|
|
|
|
t |
|
|
|
|
|
|
(4.4) |
||||||
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|||||||||
T |
1 |
2 |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где
T - постоянная времени,
- коэффициент демпфирования.
Следовательно имеем:
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
||
h(t) |
k |
1 |
|
|
e |
|
T |
cos |
|
|
|
|
|
|
t |
|
|
|
|
sin |
|
t |
|||||||||||||
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
T |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(t |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.5) |
||||
|
|
|
k |
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
e |
|
|
|
T |
|
sin |
|
|
|
|
|
|
(t |
|
|
) |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
или с учетом |
|
|
|
|
|
|
|
, имеем более компактную форму: |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
T |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
h(t) |
k 1 |
|
|
e |
T |
cos |
t |
|
|
|
|
sin |
|
t |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(t |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.6) |
|
|
e |
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
|
(t |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Время нарастания t и для колебательного звена определяется по из-
вестной формуле:
tн |
1 |
arctg |
T |
(4.7) |
|
|
Выражение (4.6) для суммарной переходной характеристики предпола-
гает во-первых, точное равенство tн = ( в случаев ) tн будет наблюдаться перерегулирование, в сличает (tн - отрицательное перерегулирование), а во-
( в случаев ) tн будет наблюдаться перерегулирование, в сличает (tн - отрицательное перерегулирование), а во-
80