

Системы управления роботами. Литвиненко А.М
.pdfБлок сопряжения с манипулятором, в соответствии с полученным из блока управления сигналом формирует команды управления приводим манипулятора, про-
изводит опрос состояния датчиков, информирующих об исполнении выданных на ма-
нипулятор команд, и вырабатывает для блока управления сигнал об отработке управ-
ляющей информации.
Выдача команд управления приводом осуществляется через выходные усилите-
ли, как правило, в виде напряжений переменного или постоянного тока в зависимости от типа управляемого привода.
Блок сопряжения с технологическим оборудованием выполняет функции обме-
на дискретной информацией устройства с обслуживаемым оборудованием. Длитель-
ность выдаваемой команды определяется обычно моментом получения подтвержде-
ния ее выполнения. Панель управления устройства содержит в общем случае кнопки включения-выключения питания, органы задания режимов работы, пуска и останова программы, элементы сигнализации и индикации состояния работы устройств, номе-
ров программы и отдельных ее кадров и т.д.
Функционально пульт ручного управления (обучения) служит главным образом для формирования с помощью органов управления сигналов ручного перемещения звеньев манипуляторa, управления захватами и т.д. Основными режимами работы устройства являются обучение, ручное управление, автоматическая работа При обу-
чении осуществляется программирование перемещений звеньев манипулятора, выда-
ча команд управления технологическим оборудованием и другой управляющей ин-
формации.
Особенность процесса обучения устройства циклового управления – положение точек позиционирования захвата манипулятора определяется «настройкой» (ручной установкой) упоров, по которым происходит позиционирование звеньев. В програм-
моноситель заносится информация о последовательности, порядке смены положений звеньев манипулятора, что позволяет в таких устройствах использовать программоно-
ситель с малой информационной емкостью.
Управляющая информация программируется по кадрам, состав которых в об-
щем случае определяется командами, выдаваемыми на привод манипулятора и техно-
логическое оборудование, с указанием очередности их исполнения, а также условия-
ми ветвления программы и т. д.
В автоматическом режиме работы заранее подготовленная в процессе обучения программа из программоносителя по кадрам считывается в блок управления, где за-
ложенная в ней управляющая информация обрабатывается и выдается в блоки сопря-
жения с манипулятором и технологическим оборудованием для непосредственного воздействия на управляемый и обслуживаемый объекты.
Рассмотрим более подробно принципы структурно-алгоритмической организа-
ции специализированных устройств циклового управления на примере структурной схемы устройства ЭЦПУ-6030, отображающей его функциональный состав и основ-
ные связи между узлами.
Простота реализуемых функций, связанная с управлением манипулятором с двухпозиционными звеньями, малым объемом управляющей программы и т.д. обу-
словила:
-построение блока управления без применения микропрограммного автомата,
в виде специализированной схемы управления;
-выбор в качестве программоносителя наборного поля из декадных переклю-
чателей типа «Контравес»;
- упрощенную реализацию основных функциональных узлов и блоков.
В состав блока управления входят:
-схема пуска-останова 2, осуществляющая запуск и останов устройства;
-счетчик кадров 3 со схемой помехозащиты 4, обеспечивающие помехо-
устойчивую выборку и последовательность выполнения кадров программы;
-дешифратор выборки кадров 1 из программоносителя;
-схема формирования сигнала отработки кадра 5, получаемого на основе сиг-
налов исполнения отдельных команд, вырабатываемых в блоках сопряжения
с манипулятором и технологическим оборудованием.
Для расширения функциональных возможностей устройства блок управления снабжен узлом формирования выдержки времени программы 6 и схемой пропуска и перехода 7, обеспечивающими соответственно задание временных выдержек управ-
ляющих сигналов и реализацию простейших операций ветвления программы.
Программоноситель содержит два наборных поля, состоящих из 30 декадных переключателей в каждом. Управляющую программу по кадрам формируют путем набора определенных комбинаций положений переключателей. Организация про-
граммоносителя и система команд позволяют обеспечить программирование одно-
временного исполнения до двух команд управления звеньями манипулятора, а также
– технологических команд, опросов датчиков, выдержки времени, логических команд
(безусловный переход, пропуск по условию) и т.д.
Блок сопряжения с манипулятором содержит:
-выходной регистр 13 с выходными усилителями сигналов 14, выдаваемых непосредственно на привод манипулятора;
-схему опроса датчиков манипулятора 12, которая при срабатывании соот-
ветствующего датчика формирует сигнал отработки исполняемой команды для блока управления;
-формирователь выдержки времени отработки команды 11, выдаваемой на манипулятор.
Организация блока сопряжения с технологическим оборудованием не отличай-
ся принципиально от описанного выше блока и функционально содержит узлы вы-
ходных усилителей технологических команд 10, формирователя временных выдержек технологических команд 8 и схему опроса датчиков технологических команд 9.
С помощью пульта управлении осуществляют выбор режима работы устройст-
ва, ручное управление звеньями манипулятора, пуск и останов программы, индика-
цию состояния звеньев манипулятора, номера кадра (шага) программы и т.д.
В автоматическом режиме работы по сигналам от счетчика кадров 3 осуществ-
ляется выбор очередного кадра программы из программоносителя. При этом управ-
ляющие команды, выдаваемые на манипулятор, запоминаются на триггерах узла 13 и
хранятся до поступления новых команд, а команды на технологическое оборудование поступают непосредственно на обслуживаемый объект и «присутствуют» на выходе устройства только в течение времени их исполнения, т.е. до момента поступления сигналов отработки с датчиков технологического оборудования или от формировате-
ля временных выдержек технологических команд.
По получении всех сигналов исполнения данного кадра программы узел 5 фор-
мирует результирующий сигнал, который, поступая через схему помехозащиты 4 на счетчик кадров, переводит последний в новое состояние, соответствующее очередно-
му кадру программы.
В процессе исполнения команды «Пропуск по условию» узлы 7 и 5 осуществ-
ляют запуск схемы 4, формирующей сигнал опроса условия пропуска. При наличии такого условия схема пропуска и перехода 7 вырабатывает дополнительный сигнал +1
для схемы счетчика кадров 3, что и обеспечивает пропуск кадра в программе.
При выполнении команды «Безусловный переход» по сигналу их схемы поме-
хозащиты 4 узел 7 вырабатывает сигнал для счетчика кадров 4 фиксированного кода,
являющегося адресом перехода к новому кадру программы. Отметим, что схема по-
мехозащиты 4 в известной мере компенсирует отсутствие гальванических развязок в выходных цепях устройства, обеспечивая необходимый уровень помехоустойчивости.
Ориентация разработки устройства ЭЦПУ-6030 на управление манипуляторами типа МП-9С, используемыми при автоматизации операций с простым технологиче-
ским циклом, позволила создать малогабаритное микроэлектронное устройство на-
стольного типа с необходимыми технико-экономическими показателями.
Целый ряд задач автоматизации технологического оборудовании с помощью цикловых IIP требует применения более совершенных, а следовательно, и более сложных манипуляторов (с числом координат до 5-7; промежуточными точками по-
зиционирования звеньев, наличием режимов торможения и т.д.) с функционально бо-
лее развитыми устройствами управления. Примером таких специализированных уст-
ройств могут служить устройство УЦМ-20 и модернизированное на его основе уст-
ройство УЦМ-30.
По сравнению с рассмотренным выше устройством «функциональная» нагрузка блоков в данном случае возросла. В первую очередь это касается организации блока управления, качественным отличием которого является его реализация на баде мик-
ропрограммного автомата.
Структурная схема блока управлении устройства УЦМ-30 приведена на рис.2.3. Блок управления имеет следующие основные функциональные узлы:
-микропрограммный автомат, работающий по жестко заложенному алгорит-
му, обеспечивающий выдачу управляющих сигналов на все операционные узлы блока управления;
-генератор тактов, формирующий сигналы синхронизации автомата и форми-
рователи временных выдержек;
-счетчик кадров, адресующий программоноситель;
-регистр команд, фиксирующий управляющую информацию на время испол-
нения кадра;
-узел формировании команд, непосредственно выдающий в блоки сопряжения
собъектом команды управления.
Программоноситель устройства УЦМ-20 построен на основе печетной платы с устанавливаемыми в соответствующие позиции диодными штекерами оригинальной конструкции; в устройстве УЦM-30 в качестве программоносителя использовано опе-
ративное запоминающее устройство (ОЗУ) на интегральных микросхемах с малым потреблением энергии и с подпиткой от батареи, что позволяет сохранять информа-
цию при отключениях источника питании.
Такое энергонезависимое ОЗУ обеспечивает оперативное изменение програм-
мы, имеет малые габаритные размеры при высокой надежности и большую информа-
ционною емкость (100 кадров программы для устройства УЦМ-30). Управляющая программа устройства формируется из кадров с постоянным форматом объемом 32
бита и содержит информацию об управлении звеньями и захватом двух рук манипу-
лятора с заданием величины задержки команд на торможение (разряды 1-23); указа-
нии зон ускоренного прохода, о номерах технологических команд, об обращении к подпрограмме, о задержке перехода к следующему кадру программы, контроле чет-
ности содержимого кадра и т.д. (разряды 24-32).
Под действием сигналов автомата управления в соответствии с состоянием счетчика кадров в регистр команд из программоносителя происходит считывание очередного кадра программы. Содержащаяся в нем информация через узел формиро-
вания команд блока управления передается для отработки в блоки сопряжения с ма-
нипулятором и технологическим оборудованием в следующей последовательности:
-команды управления звеньями (координатами) манипулятора;
-команды управления захватами манипулятора;
-команды управления технологическим оборудованием.
В составе блока сопряжения с манипулятором устройств УЦМ-20 и УЦМ-30
отсутствуют узлы хранения выходных команд управления звеньями ввиду специфики управляемых манипуляторов, имеющих в пневмораспределительной аппаратуре зо-
лотники с запоминанием управляющих сигналов, поэтому указанные команды посту-
пают на приводы манипулятора непосредственно через выходные усилители.
Блок выходных усилителей выполнен на оптронных тиристорах, обеспечиваю-
щих гальваническую разрядку логических цепей устройства с цепями приводов ма-
нипулятора.
Длительное выдачи управляющих команд на манипулятор и технологическое оборудование определяется временем исполнения кадра программы, т.е. получением
ответных сигналов об отработке, всех выданных команд.
Сопряжение с датчиками манипулятора также выполнено с применением галь-
ванической развязки и обладает отличительной особенностью связанной со своеоб-
разной организацией системы датчиков, которая, в частности, выдает в устройство не
состояние звеньев манипулятора, а сигнал окончания заданного перемещения звена.
Выдача технологических команд производится через выходные реле в виде «сухих контактов». Набор программы и занесение ее в программоноситель производят с помощью специального встроенного пульта программирования. Управление дви-
жением манипулятора в процессе наладки осуществляют с помощью органа выносно-
го пульта ручного управления. Задание режимов работы и оперативное управление устройством осуществляют с панели управления, содержащей переключатель режи-
мов работы, кнопки пуска-останова, цифровые индикаторы номера кадра программы,
световую сигнализацию состояния работы устройства и т. п.
Устройство УЦМ-30 по сравнению с ЭЦПУ-6030 имеет расширенные функцио-
нальные возможности вследствие применения управляющего микропрограммного ав-
томата и энергонезависимого ОЗУ достаточной емкости. Однако по своему назначе-
нию устройства УЦМ-20 и УЦМ-30 являются специализированными, ориентирован-
ными на оснащение манипуляторов типа «Циклон» и «Ритм».
Дальнейшее развитие процесса роботизации производств с качественным расширением сферы применения цикловых ИР привело к созданию разнообразных моделей манипуляторов, отличающихся повышенной сложностью кинематики. Это определило новые требования к функциональным возможностям средств управления в отношении реализации более сложных технологических алгоритмов работы как самого манипулятора, так и сопутствующего оборудования, в частности:
-увеличение числа промежуточных точек позиционирования по упорам до 5-
6 на координату;
-согласованное управление выдвижными упорами;
-реализация алгоритмов торможения звеньев «тяжелых» манипуляторов при подходе к упору;
-увеличение числа технологических команд и усложнение логики управления технологическим оборудованием;
-организация технологических программ с переменной последовательностью кадров, т. е. ветвлениями, подпрограммами, локальными циклами и т.п.;
-развитая система аварийных блокировок;
-увеличение функциональной емкости программоносителя.
Разработка специализированных устройств управления для решения указанных задач оказалась экономически нецелесообразной. Поэтому работы по созданию средств циклового управления ПР на данном этапе проводятся в направлении осна-
щения унифицированными серийными устройствами широкой номенклатуры разно-
образных манипуляторов. Примером такого устройства является модель УЦМ-663.
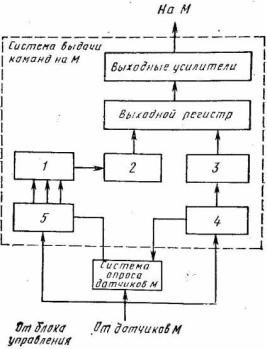
Рис. 2.1. Структурная схема блока сопряжения с манипулятором устройства УЦМ-663: 1 – матрица состояний; 2 – матрица кодирования; 3 – матрица стробирова-
ния; 4 – схема управления матрицей стробирования; 5 – схема управления матрицей состояния.
При сохранении основного функционального состава блоков устройства и ха-
рактера связей между ними построение каждого из блоков отражает повышенный уровень управления и сложность реализуемого алгоритма.
Блок управления по своей структуре построен на базе центрального микропро-
граммного автомата и ряда автоматов местного управления. Введение дополнитель-
ных операционных узлов, связанных с расширением логических возможностей уст-
ройства, например подсчетом числа локальных циклов и т.д. существенно не изменя-
ет общих принципов структурного построения блока управления данного устройства.
В качестве программоносителя в устройстве используется указанный выше тип энер-
гонезависимого ОЗУ на интегральных микросхемах. Отличительной особенностью данного устройства является организация функционально-гибкой привязки устройст-
ва к манипуляторам, реализованная в блоке сопряжения с манипулятором, структур-
ная схема которого приведена на рис. 2.1. Функционально данный блок состоит из двух систем: опроса датчиков и выдачи команд на манипулятор.
Система опроса датчиков имеет в своем составе ОЗУ для текущего хранения состояния датчиков манипулятора, коммутатор датчиков, опрашивающий все датчики манипулятора последовательно по координатам, и схему местного управления, осу-
ществляющую циклический опрос датчиков, шифрацию их номера и запись кодов,
работавших на каждой из координат манипулятора датчиков в ОЗУ. В процессе рабо-
ты информация о состоянии звеньев манипулятора (номера сработавших датчиков) по запросу из блока управления передается в систему выдачи команд на манипулятор,
что необходимо для определения режима работы звеньев и формирования сигнала обработки команд управления манипулятором.
Сопряжение устройства с различными типами приводов манипулятора обеспе-
чивается за счет организации системы выдачи команд, которая позволяет программи-
ровать алгоритмы управления практически любым типом «циклового» привода, в том числе с промежуточными точками позиционирования нa упорах и режимом торможе-
ния.
Укрупненно система выдачи команд на манипулятор включает следующие основные узлы:
-выходной регистр (ВР), обеспечивающий текущее хранение состояния всех
управляемых золотников манипулятора;
-вводные усилители, формирующие сигналы управления приводом;
-матрицы состояний, кодирования и стробирования со схемами управления.
Основные логические функции по реализации алгоритмов управления приво-
дами манипулятора программируются с помощью трех переделенных диодных мат-
риц. Координаты обрабатываются последовательно во времени.
Функционально матрица состояний выявляет (дешифрирует) одно из воз-
можных состояний звена манипулятора, определяемое режимом, направлением дви-
жения звена и номером точки, в которую звено должно выйти. Матрица кодирования формирует для каждого состояния координаты управляющую информацию о том,
какое состояние выходных каналов должно соответствовать выделенному состоянию.
Матрица стробирования, фактически распределяющая выходные каналы устройства
между звеньями (координатами манипулятора), выдает импульсы записи управляю-
щей информации с выхода матрицы кодирования в ВР. Матрица состояний имеет
13 водных шин и 20 выходных шин-состояний. На входе матрицы имейся три шины,
задающие режим работы координаты («останов», «замедление», «движение»), две
шины, определяющие направление движения (впередназад), |
и восемь шин номе- |
ра точки от 0 до 7. Распайкой диодов в матрице реализуется |
логическая функция |
И между каждой из шин режима, направления движения и номера точки. Каждая функция И, собранная (запрограммированная) с помощью диодов, и является одним из 20 возможных состояний, поступающих в матрицу кодирования. Различные коор-
динаты, естественно, могут иметь одинаковые состояния, например, — останов,
назад.
В матрице кодирования, имеющей 20 входных шин (по числу состояний ко-
ординаты) и 28 выходных шин для каждого состояния, с помощью распайки диодов формируется набор включенных выходных каналов одновременно для всех коорди-
нат, имеющих данное состояние.
Запись в ВР производится импульсными сигналами, вырабатываемыми матри-
цей стробирования, имеющей шесть входных шин (по числу координат) и 28 выход-
ных. В схеме управления матрицей стробирования предусмотрен специальный счет-
чик координат, в котором хранится текущий номер обрабатываемой координаты. К
выходу счетчика подключен тактируемый микропрограммным автоматом дешифра-
тор, выдающий импульсы на входные шины матрицы стробирования. Формирование режима работы координаты производится в схеме управления матрицей состояний на основе сравнения положения звена манипулятора (информация о котором хранится в ОЗУ системы опроса датчиков) с заданным из блока управления.
С целью повышения помехоустойчивости выдача команд управления на мани-
пулятор, точнее их подтверждение, производится циклически с высокой частотой, в
том числе и по координатам, не выполняющим движений в отрабатываемом кадре.
Устройство УЦМ-663 имеет достаточно развитую систему блокировок на осно-
ве диодной матрицы.
На входы матрицы блокировок поступают сигналы непосредственно с датчиков крайних положений манипулятора (12 шин) и датчиков аварийного состояния обору-
дования. Выходные шины матрицы опрашиваются с помощью вентилей при форми-
ровании команд управления приводом импульсом, тактирующим матрицу стро-
бирования. При отсутствии на одной из выходных шин матрицы установленных дио-
дов на ней создается потенциал логической «единицы», который разрешает выполне-
ние команды. В случае установки диодов разрешение на выполнение команды ставит-
ся в зависимость от состояния датчиков, подключенных к входным шинам матрицы.
Таким образом можно заблокировать, например, повороты манипулятора с вытянутой рукой при попытке выдать соответствующие команды как в автоматическом, так и ручном режиме. Другие функциональные блоки устройства в отношении их струк-
турной организации существенного интереса не представляют и поэтому нами не рас-
сматриваются.
Программирование устройства осуществляется путем покомандного набора программы на пульте оператора, совмещающего в себе функции пульта ручного управления и панели управления.
Характерной особенностью является переменный формат кадра, включающий одну или несколько одновременно отрабатываемых единичных команд, позволяющий экономить емкость программоносителя. Каждая команда состоит из кода операции
(КОП) и информационной части, в общем случае необязательной.
Ручное управление звеньями осуществляется с помощью команд «Движение»,
Для упрощения действий оператора на панели пульта управления размещены 12 кно-
пок, кодирующих не только КОП, но и номер управляемой координаты, а также на-
правление ее движения. На кнопках нанесены мнемонические знаки, соответ-
ствующие кинематике манипулятора.
Команды «Внешнее оборудование» используют для программирования работы сопутствующего технологического оборудования. Задание требуемых по циклограм-