

Динамика полета. Расчет траекторий самолетов учебное пособие. Пентюхов В.И., Будник А.П
.pdfМИНИСТЕРСТВО ОБЩЕГО И ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
ВОРОНЕЖСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
В.И. ПЕНТЮХОВ А.П. БУДНИК
ДИНАМИКА ПОЛЕТА
Расчет траекторий самолетов учебное пособие
Воронеж 1999
3

УДК 629.7.015.001.24
Динамика полета; расчет траекторий самолетов: Учеб. пособие/ В.И.Пентюхов, А.П.Будник; Воронеж. гос. техн. ун-т. Воронеж 1999. 107с.
В учебном пособии изложены вопросы, связанные с расчетом траекторий современных самолетов. Приведены
основные гипотезы и допущения, обычно |
применяемые |
||||
при расчетах |
траекторий современных |
самолетов и |
опр е- |
||
делении летно-технических характеристик. |
|
|
|||
Изложены |
кинематические |
основы |
различных |
мет о- |
|
дов наведения. |
|
|
|
|
|
Учебное пособие предназначено для студентов ави а- |
|||||
ционных специальностей, а |
также |
для |
инженерно - |
||
технических работников, желающих ознакомиться с с о- временными методами расчета траекторий самолета.
Рукопись набрана в текстовом редакторе Word 7.0 и размещена на дискете 1.44 Мбайт в виде файла Титул .doc и самораскрывающегося файла ss.exe , включающего текст учебного пособия.
Ил. 32. Библиогр.:14 назв.
Научный редактор канд. техн. наук Е.Н.Некравцев Рецензенты: кафедра 106 МАИ; канд. техн. наук В.А.Шалиткин
Печатается по решению редакционно -издательского совета Воронежского государственного технического университета
В.И. Пентюхов, А.П. Будник, 1999 Воронежский государственный технический университет, 1999
4
1. Уравнения движения самолета
1.1. Гипотеза стационарности
Аэромеханикой самолета называется область мех аники, изучающая законы движения самолета под дейс твием внешних сил.
Создание реактивных самолетов и различных кла с- сов беспилотных летательных аппаратов расширило круг задач аэромеханики. В результате возникла более общая
дисциплина - динамика |
полета летательных апп аратов, |
в |
||
которую аэромеханика |
самолета |
входит |
как составная |
|
часть. |
|
|
|
|
Все задачи, рассматриваемые в динамике полета с а- |
||||
молета, можно разделить на две |
большие |
группы. |
|
|
К первой группе |
относятся |
задачи |
о возможных |
и |
наивыгоднейших ( оптимальных ) траекториях полета. При рассмотрении задач этой группы можно не вн икать в процесс управления самолетом, а фиксировать внимание только на результатах этого процесса, свод ящихся к определенным законам изменения скорости, высоты полета и других кинематических параметров, характеризующих движение самолетов в зависимости от времени. При этом должны быть выявлены требов ания к силам, действую-
щим на самолет, для |
того |
чтобы |
обеспечить тот |
или |
|
иной характер |
его траектории. Причем, как показывает |
||||
практика, при |
решении |
этой |
группы |
задач самолет |
мож- |
но рассматривать как мат ериальную точку переменной массы. Для подтверждения сказанного рассмотрим пр о- цесс изменения траектории полета самолета в верт и- кальной плоскости (рис 1.1). Очевидно, чтобы искривить траекторию самолета в вертикальной плоскости, надо и з- менить величину подъемной силы. А так как подъемная
сила |
определяется |
величиной |
угла |
атаки, |
то надо |
изм е- |
нить |
угол атаки, |
т.е. повернуть |
самолет |
относительно |
||
вектора скорости. |
Поворот самолета относительно |
векто- |
||||
|
|
5 |
|
|
|
|
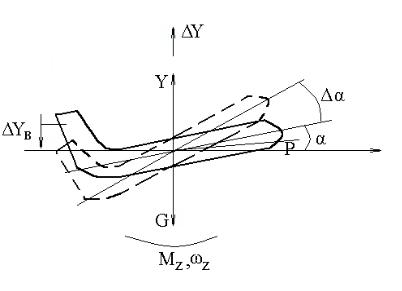
ра скорости можно осуществить, приложив момент отн о- сительно центра тяжести самолета. Для соз -
Рис 1.1 дания этого момента служит руль в ысоты .
Итак, направление полета самолета в вертикальной плоскости изменяется в следующей последовательности. После отклонения руля высоты на нем возникнет д ополнительная аэродинамическая сила , создающая м омент относительно поперечной оси, проходящей через центр т я- жести самолета. Этот момент приведет к в озникновению через некоторое время угловой скорости вращения сам о- лета относительно центра тяжести. Еще через некоторое время самолет под действием угловой скорости пове р- нется на некоторый угол относительно вектора скорости, при котором восстановится равнов есие моментов. В результате такого поворота изменится величина равноде й- ствующей аэродинамических сил. При этом равновесие сил, действующих на самолет, нар ушится, и в результате возникшего нормального ускор ения направление вектора скорости начнет изменяться, т.е. траектория п олета само-
лета |
будет искривляться. |
|
Таким образом, движение самолета в случае изм ене- |
ния |
направления полета должно описываться уравн ения- |
ми |
равновесия сил и моментов. Теория в полном согл а- |
сии с экспериментом показывает, что время со здания дополнительной результирующей силы, необход имой для
6
изменения направления движения самолета, п олучается существенно меньшим, чем время изменения направления полета. Так как при решении первой группы задач нас будет интересовать конечный р езультат рассмотренных действий, то, в первом приближении, можно пренебречь временем, необходимым для создания дополнительной р е- зультирующей силы, по сравнению с временем, необх о- димым для изменения направления полета. Другими сл о- вами, можно принять, что дополнительная внешняя сила, потребная для изменения направления полета, появляется мгновенно вслед за отклонением руля. Для большинства самолетов сила, возникающая на руле при его отклон е- нии и создающая момент относительно центра тяжести самолета, получается по величине существенно меньшей, чем остальные внешние силы. Поэтому в первом прибл и- жении можно также принять, что величина внешних сил, действующих на самолет, не зависит от положения рулей и характера движения и полностью определяется в ка ж- дый момент времени угловым положением самолета и направлением силы тяги.
Это положение, существенно упрощающее решение первой группы задач, называется гипотезой стациона рности.
Таким образом, в соответствии с гипотезой ст ационарности при определении внешних сил, действу ющих на самолет, неустановившееся движение не прин имается во внимание, и силы определяются так, как будто движение
является установившимся |
с кинемат ическими параметра- |
ми, равными их мгновенным значен иям. |
|
Принятые допущения |
позволяют определять хара ктер |
траектории самолета, исследуя только уравнен ия равновесия сил в проекциях на оси той или иной си стемы координат, т.е. действительно позволяют при о пределении траекторий рассматривать самолет как мат ериальную точку переменной массы.
Первую группу задач можно разбить на две по д- группы.
7
К первой подгруппе относятся задачи, связанные с исследованием установившихся движений самолета, т.е. движений самолета с постоянной скоростью по прям олинейным траекториям.
Эту подгруппу задач часто называют аэродинам ическим расчетом самолета. Основы аэродинамического ра с- чета самолета разработаны Н.Е. Жуковским.
Ко второй подгруппе относятся задачи, связанные с исследованием неустановившихся и криволинейных тр а- екторий самолета.
В задачах второй группы , наоборот, подробно исследуется процесс управления самолетом и выясняется у с- тойчивость его движения по той или иной траект ории под действием различных возмущений.
В результате решения задач второй группы должна
быть |
выяснена воз можность осуществления полета по |
||
той |
или иной траектории, найденной в |
результате |
р еше- |
ния |
задач первой группы, определен |
потребный |
закон |
управления самолетом , необходимый для полета по в ы- бранной траектории, и дана оценка выполнимости на й- денного закона управления. При решении задач этой группы самолет необходимо рассматривать как тело п е- ременной массы.
Эту группу задач часто выделяют под отдельным названием - устойчивость и управляемость самолета.
1.2. Внешние силы, действующие на самолет
На самолет в полете действуют массовые силы, а э- родинамические силы и сила тяги двигателей.
Полеты самолетов происходят в непосредственной близости от поверхности Земли. Поэтому из всех ма ссовых сил на движение самолета влияет только сила пр и- тяжения Земли. Остальные массовые силы незнач ительны по величине и не принимаются во внимание при иссл е- довании движения самолетов.
8
Нешарообразность |
Земли |
оказывает |
малое влияние |
на величину массовой |
силы. |
Поэтому в |
дальнейшем б у- |
дем считать, что Земля имеет форму шара и це нтром ее притяжения является геометрический центр этого шара.
Согласно |
закону |
Ньютона |
ускорение |
силы тяжести |
в |
||||
этом случае равно: |
|
|
|
|
|
|
|
||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
g |
g 0 |
R з |
|
|
|
|
|
|
|
R з Н |
|
|
|
|||
где |
g 0 - |
ускорение |
силы |
тяжести на |
уровне моря |
( |
|||
g 0 |
= 9,81 м / с2 ); |
|
|
|
|
|
|
|
|
|
R з |
- радиус Земли |
как |
шара ( |
R з |
6371 км); |
|
||
Н- высота полета.
Для |
высоты |
Н = 50 |
км , ускорение |
силы тяжести |
g |
9,7 |
м / |
сек 2 , т.е. |
мало |
отличается от |
g 0 . Поэтому |
в |
боль- |
шинстве случаев при исследовании динамики дв ижения самолетов можно принимать, что g0 = g. В этом случае связь между массой самолета и его весом о пределяется линейной зависимостью
G = g 0  m = ( 9,81
m = ( 9,81  m ) кГ
m ) кГ
или в системе СИ
GС И = 9.81 G H ( ньютонов )
Кроме силы веса на самолет в полете действует це нтробежная сила, обусловленная кривизной земной п оверхности. Центростремительное ускорение, обусловле нное кривизной земной поверхности, зависит от скор ости полета и возрастает при ее увеличении. При пол ете самолета со
скоростью V 1000 м / с |
параллельно земной поверхно- |
сти центростремительное |
ускорение равно |
jc |
V2 |
= 0,16 |
м / сек |
2 |
R з |
|
|||
что составляет около |
1,6 % от |
ускорения силы тяж ести. |
||
Поэтому в большинстве случаев динамики полета уск о- рением, обусловленным кривизной земной повер хности,
можно пренебречь. |
|
|
Аэродинамические |
силы, действующие |
на сам олет, |
представляют в виде |
трех составляющих |
в пол усвязан- |
9
ной системе координат: подъемной противления Q и боковой силы силы следующим образом зависят полета
силы Y, лобового со- Z . Аэродинамические от высоты и скор ости
Y = CyS |
|
|
V2 |
CyS |
0,7p |
|
|
M2 |
||||
|
|
2 |
|
H |
||||||||
|
|
|
|
|
|
|
|
|
|
|||
Q |
CxS |
|
V2 |
CxS |
0,7p |
|
|
M2 |
||||
|
2 |
|
H |
|||||||||
|
|
|
|
|
|
|
|
|
|
|||
Z |
CzS |
|
|
|
V2 |
CzS |
0,7p |
|
|
M2 |
||
|
2 |
|
H |
|||||||||
|
|
|
|
|
|
|
|
|
|
|||
значения коэффициентов |
Сх , Су |
и |
|
|
Сz определяют на |
|||||||
основании продувок моделей в трубах или путем те оре-
тического |
расчета. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
При |
решении |
ряда задач |
|
аэромеханики целесоо браз- |
|||||||||||||
но |
иметь |
аналитические |
выражения |
для |
коэффицие нтов |
|||||||||||||
Сх , Су |
и Сz . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
В |
области |
дозвуковых скоростей поляру самолета, |
|||||||||||||||
т.е. зависимость Сх = Сх (Су) |
можно |
представить |
в |
виде |
||||||||||||||
квадратичной зависимости Сх |
|
от Су следующим образом |
||||||||||||||||
|
|
|
|
|
|
|
Cx |
Cx0 |
|
BCy2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
В |
|
1 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
э |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где |
э - эффективное |
удаление |
|
крыла. |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
1 |
1 |
|
|
0,01 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
э |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Зависимость коэффициента Су от угла атаки |
|
имеет |
|||||||||||||||
линейный |
характер |
в |
большом |
|
диапазоне |
углов |
ат аки, |
|||||||||||
т.е. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Су |
Су |
- |
0 |
|
|
|
|
||||
где |
0 |
- |
значение |
угла |
атаки, |
соответствующее |
нулевой |
|||||||||||
подъемной силе. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Линейная |
теория |
сверхзвуковой |
аэродинамики, как |
||||||||||||||
известно, |
приводит |
к |
линейной |
|
зависимости Су |
от |
угла |
|||||||||||
10
атаки |
и |
к квадратичному выражению для поляры, т.е. |
|||||
к тем |
же |
выражениям, |
что и для дозвуковых скор остей, |
||||
только коэффициенты Су |
, Схо |
и В являются |
функциями |
||||
числа |
М. |
|
|
|
|
|
|
Имея |
экспериментальные |
зависимости Сх |
= Сх ( ) и |
||||
Сх = Сх (Су) |
для |
разных |
чисел М, можно построить за- |
||||
висимости Су |
= Су |
(М), Схо = Схо (М), В = В (М) и в даль- |
|||||
нейшем пользоваться вышеприведенными формулами. Сила тяги, необходимая для полета самолета, созд а-
ется установленным на нем движителем.
С точки зрения механики в основу всех движит елей положен один принцип: отбрасывание рабочего т ела в сторону, противоположную желаемому движению.
Источником энергии для движителя является дв игатель. По составу рабочего тела двигатели можно разд е- лить на ракетные, воздушно - реактивные и винтовые. На современных самолетах применяют в основном возду шно
-реактивные и турбовинтовые двигатели.
Увоздушно - реактивных двигателей рабочее тело состоит из воздуха и продуктов сгорания горючего, н а- ходящегося на борту самолета. У винтовых двигат елей
рабочее |
тело |
берется |
из окружающей среды, так как |
т я- |
||||
га создается |
за |
счет |
отбрасывания массы воздуха |
во з- |
||||
душным |
винтом. |
Правда, |
создается |
реактивная |
сила |
за |
||
счет выхлопных газов, но |
эта сила |
невелика. |
|
|
||||
Зависимости |
тяги |
(мощности) двигателя и |
удельн ого |
|||||
расхода топлива, т.е. часового расхода топлива, пр иходящегося на 1 кГ тяги (на 1 л.с. мощности), от ск орости, высоты полѐта и числа оборотов двигателя н азываются характеристиками двигателя. Обычно характ еристики двигателей подразделяют на скоростные, в ысотные и дроссельные.
1.3. Системы координат
11
В динамике полета самолета наиболее широко пр и- меняются следующие системы координат.
Земная система координат . Начало земной системы |
|
координат |
помещается как на поверхности земли, та к и |
в центре |
масс самолета. Ось yз направлена по радиусу |
земного |
шара вверх. Ось xз лежит в местной горизон- |
тальной |
плоскости и ориентирована в каком -либо удоб- |
ном направлении. Ось zз перпендикулярна плоскости xз yз |
|
и направлена так, чтобы система координат была пр авой. Связанная с самолетом система координат . Начало связанной системы координат помещается в центре масс
самолета. Оси x1 , y1 , называемые продольными и поп е- речными осями самолета , расположены в вертикальной плоскости самолета и направлены вдоль гла вных осей
инерции вперед по полету и верх соответс твенно. Ось z1
перпендикулярна плоскости x1y1 и направлена так, чтобы система координат была правой. Пол ожение связанной системы координат относительно зе мной определяется
тремя углами: углом |
тангажа , углом рысканья |
и углом |
крена . |
|
|
Углом тангажа |
называется угол между |
местной |
горизонтальной плоскостью x1 и направлением оси свя-
занной |
системы координат. |
|
|
|
||||
Углом |
рысканья |
называется угол |
между прое кцией |
|||||
оси x1, связанной системы |
координат |
на местную гор и- |
||||||
зонтальную |
плоскость |
и |
некоторым |
направлением на |
||||
ней, принятым за |
начальное. |
|
|
|
||||
Углом |
крена |
называется угол |
между |
местной ве р- |
||||
тикальной |
плоскостью и вертикальной плоскостью си м- |
|||||||
метрии |
самолета. |
|
|
|
|
|
|
|
Траекторная |
система |
координат . |
Начало |
траекторной |
||||
системы координат помещается в центре масс с амолета. Ось x направлена по вектору скорости полета относ и-
тельно земли. Ось y |
направлена вверх по |
перпе ндикуляру |
к оси x, лежащей в |
местной вертикальной |
плоскости, с о- |
12