

2497
.pdfлы DE и RE# могут выводиться с единой линии порта МК ,т. е. на МК задействуются 3 вывода.
1.3.2. Стандарт CAN
Структура CAN-сети представлена на рис. 5.
Рис. 5. Структура CAN-сети
Физическая среда передачи данных в CAN может быть самой разной – витая пара, плоский кабель, оптоволокно, а также радио- и ИК-каналы и даже линии электропередач. Основным ограничением протяженности шины является лишь предельно допустимая суммарная задержка распространения сигнала для заданной скорости передачи (в кабеле, трансиверах, входных цепях контроллеров и т.д.).
21
Как видно из рис. 5, для работы в CAN-сети микроконтроллер должен иметь специальный модуль с двумя выводами (Tx и Rx являются альтернативными функциями выводов одного из портов). Контроллеры, не имеющие CAN-интерфейса, сопрягают с шиной через модуль MCP2510 и трансивер. Гальваническую развязку и трансивер разработчику нужно выбрать.
1.3.3. Интерфейс I2C
Интерфейс I2C (Interconnect Integrated Circuit) является двух-
проводным последовательным интерфейсом, завоевавшим популярность относительно высокой скоростью передачи данных, дешевизной и простотой реализации.
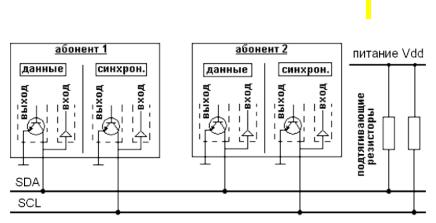
Типовая конфигурация I2C-шины показана на рис. 6.
Рис. 6
I²C использует две двунаправленных линии с открытым коллектором (истоком) – последовательная линия данных (SDA, англ. Serial DAta) и последовательная линия тактирования (SCL, англ. Serial CLock). Обе линии подтянуты резисторами к плюсу питания. Стандартные напряжения Vdd +5 В или +3.3 В, однако допускаются и другие. Резисторы имеют номинал от нескольких килоом до нескольких десятков килоом (чем выше скорость – тем меньше номинал резисторов, но больше энергопотребление). Минимальное значение для Vdd = +5 В составляет около 2 кОм.
22

Основными свойствами интерфейса I2C являются следующие:
•двунаправленная передача данных между главными и подчиненными устройствами (полудуплекс);
•многоабонентская шина (центрального главного узла
всети может не быть);
•арбитраж между одновременно передающими устройствами без разрушения целостности передаваемых данных;
•последовательная тактовая синхронизация позволяет приборам с различными скоростями передачи битов осуществлять связь через одну последовательную шину;
•шунтирование приемником линии тактовой синхронизации может использоваться в качестве механизма квитирования установления связи, чтобы приостанавливать и возобновлять последовательную передачу.
К шине может быть подключено до 128 абонентов, каждый со своим уникальным адресом.
1.3.4. Интерфейс SPI
Стандарт SPI (Serial Peripheral Interface) предназначен для связи МК с периферийными устройствами МП-системы, но используется также для обмена данными между несколькими МК системы.
На рис. 7 в качестве примера представлена структурная схема сопряжения МК и двух периферийных ИС с использованием интерфейса SPI. В рассматриваемом примере МК является ведущим устройством (Master), он инициирует обмен при передаче информации между МК и одной из периферийных ИС. Каждая из периферийных ИС является устройством ведомым (Slave).
SPI-шина (магистрально-радиальная архитектура) представлена тремя общими линиями связи (MISO, MOSI, SCK) и двумя
линиями выбора ведомого устройства ( SS1 , SS2 ), которые индивидуальны для каждой периферийной ИС: MOSI – линия пе-
23

редачи данных от ведущего к ведомому (Master Output Slave In-
Рис. 7. Сопряжение МК с периферийными ИС посредством интерфейса SPI
put); MISO – линия передачи данных от ведомого к ведущему
(Master Input Slave Output); SCK – линия сигнала стробирования
данных; SS1 и SS2 – линии сигналов выбора ведомого устройства. Таким образов, для трех ведомых МК в разрабатываемом проекте ведущий должен использовать 6 выводов, а ведомые – по 4 вывода.
Более подробные сведения по организации и функционированию описанных выше интерфейсов можно найти в [35] и многочисленных интернет-источниках.
24
2. Организация и тематика практических работ
Целью практических занятий является анализ технических решений по разработке систем управления на основе микроконтроллеров. Задания выдаются студентам индивидуально для самостоятельной работы, результаты заслушиваются в виде сообщений с демонстрацией структур и схемных решений. Теоретической базой для анализа являются учебные пособия [3-12].
3. Организация и тематика курсового проектирования
Цель курсового проектирования по данной дисциплине состоит в усвоении и закреплении знаний и навыков в области проектирования систем управления объектами. В ходе проектирования следует учитывать особенности архитектуры ЭВМ применительно к задачам управления техническими объектами [12]. Теоретической базой для проекта являются учебные пособия [3- 12].
3.1. Состав проекта
При выполнении курсового проекта необходимо в соответствии с индивидуальным заданием (см. ниже) разработать функциональное представление микроконтроллерной системы управления (МКСУ), её структурную и принципиальную схемы, определить параметры системы управления: энергопотребление, надежность, характеристики устройств согласования с двигателями исполнительной системы и датчиковыми системами.
Предполагается, что система управления во всех вариантах задания предназначена для управления робототехническим комплексом (PTK) в составе трехкоординатного робота и набора технологического оборудования. Объект управления представляется набором датчиков (тип и количество указаны в варианте), входами, управляемыми с дискретных и ШИМ-выходов СУ (тип, разрядность и количество указаны в варианте), параметрами исполнительных механизмов робота и оборудования.
25
3.2. Варианты задания на проектирование
Задание на проектирование должно оформляться на специальных бланках в соответствии с приложением 1 и включать:
тему проекта «Двухуровневая МКСУ на базе МК семейства…», причем вместо многоточия подставляется название заданного преподавателем семейства восьмиразрядных МК (AVR, PIC, STM);
данные на проектирование, взятые из табл. 2, приведенной ниже, согласно выданному номеру варианта (данные приводят текстом, в виде колонок, содержащих название параметра, его обозначение (А0…А6) и значение для данного варианта);
дополнительные указания по содержанию (при наличии);
функциональное представление МКСУ;
сроки представления материалов проекта на промежуточный и конечный контроль;
подписи преподавателя и студента, получившего задание. Задание должно выдаваться преподавателем в начале се-
местра и может быть скорректировано (в т.ч. по инициативе студента) в течение двух недель после выдачи. Не позже этого срока оно должно быть подписано.
26

|
|
|
|
|
|
|
|
|
Таблица 2 |
|
Значения параметров проекта |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Номер |
А0 |
А1 |
|
А2 |
А3 |
А4 |
|
А5 |
|
А6 |
варианта |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
R/S |
3/12 |
6 |
12 |
код/3/8 |
24/10 |
|
220 / 5 |
||
|
|
|
|
|
|
|
|
|
|
|
2 |
R/I |
3/10 |
|
7 |
12 |
код/2/4 |
|
48/4 |
|
110 / 5 |
|
|
|
|
|
|
|
|
|
|
|
3 |
C/S |
2/10 |
3 |
8 |
имп/3 |
24/12 |
|
220 / 2 |
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
4 |
C/S |
12/4 |
|
4 |
10 |
код/3/12 |
|
15/32 |
|
220 / 4 |
|
|
|
|
|
|
|
|
|
|
|
5 |
R/I |
3/8 |
6 |
12 |
код/3/8 |
12/24 |
|
110 / 15 |
||
|
|
|
|
|
|
|
|
|
||
6 |
R/S |
3/12 |
6 |
12 |
код/3/8 |
24/10 |
|
220 / 5 |
||
|
|
|
|
|
|
|
|
|
||
7 |
R/I |
3/10 |
|
7 |
12 |
код/2/4 |
|
48/4 |
|
110 / 5 |
|
|
|
|
|
|
|
|
|
|
|
8 |
C/S |
2/10 |
3 |
8 |
имп/3 |
24/12 |
|
220 / 2 |
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
9 |
C/S |
12/4 |
|
4 |
10 |
код/3/12 |
|
15/32 |
|
220 / 4 |
|
|
|
|
|
|
|
|
|
|
|
10 |
R/I |
3/8 |
6 |
12 |
код/3/8 |
12/24 |
|
110 / 15 |
||
11 |
|
|
|
|
|
|
|
|
||
R/I |
4/8 |
2 |
10 |
имп/2 |
36/6 |
|
220 / 10 |
|||
12 |
C/S |
1/10 |
4 |
12 |
имп/3 |
24/15 |
|
110 / 15 |
||
13 |
R/S |
|
|
|
код/3/6 |
|
|
|
||
4/8 |
9 |
12 |
12/32 |
|
110 / 14 |
|||||
14 |
C/I |
|
10 |
8 |
код/4/8 |
15/22 |
|
110 / 5 |
||
4/8 |
|
|||||||||
15 |
R/S |
5/10 |
6 |
8 |
код/2/6 |
24/12 |
|
220 / 8 |
||
16 |
C/S |
|
6 |
8 |
код/2/6 |
24/12 |
|
220 / 6 |
||
5/10 |
|
|||||||||
17 |
C/I |
5/10 |
3 |
8 |
код/2/8 |
12/15 |
|
110 / 12 |
||
18 |
C/S |
|
2 |
10 |
код/2/6 |
36/10 |
|
220 / 10 |
||
4/12 |
|
|||||||||
19 |
R/R |
2/15 |
5 |
8 |
код/4/4 |
15/32 |
|
220 / 3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
27 |
|
|
|
|

Окончание табл. 2
Номер |
А0 |
А1 |
А2 |
А3 |
|
А4 |
А5 |
А6 |
варианта |
|
|||||||
|
|
|
|
|
|
|
|
|
20 |
C/I |
2/12 |
3 |
8 |
|
имп/4 |
24/15 |
110 / 15 |
21 |
C/S |
2/12 |
1 |
10 |
|
имп/3 |
48/12 |
110 / 12 |
22 |
R/S |
2/12 |
3 |
8 |
|
код/3/8 |
24/18 |
220 / 3 |
|
||||||||
23 |
R/S |
3/16 |
4 |
10 |
|
код/3/6 |
36/14 |
110 / 12 |
24 |
R/I |
|
5 |
|
|
имп./3 |
|
|
11/4 |
8 |
|
12/25 |
220 / 12 |
||||
25 |
C/I |
|
|
|
|
код/4/4 |
|
|
5/11 |
7 |
8 |
|
24/20 |
220 / 15 |
|||
26 |
R/I |
|
|
|
|
код/2/6 |
|
|
8/8 |
2 |
12 |
|
12/25 |
220 / 12 |
|||
27 |
R/R |
2/15 |
5 |
8 |
|
код/4/4 |
15/32 |
220 / 3 |
28 |
C/I |
|
|
|
|
имп/4 |
|
|
2/12 |
3 |
8 |
|
24/15 |
110 / 15 |
|||
29 |
C/S |
2/12 |
1 |
10 |
|
имп/3 |
48/12 |
110 / 12 |
|
R/S |
|
|
|
|
код/3/8 |
|
|
30 |
2/12 |
3 |
8 |
|
24/18 |
220 / 3 |
||
31 |
R/S |
3/16 |
4 |
10 |
|
код/3/6 |
36/14 |
110 / 12 |
32 |
R/I |
11/4 |
5 |
8 |
|
имп./3 |
12/25 |
220 / 12 |
|
||||||||
33 |
C/I |
5/11 |
7 |
8 |
|
код/4/4 |
24/20 |
220 / 15 |
|
R/I |
|
|
|
|
код/2/6 |
|
|
34 |
8/8 |
2 |
12 |
|
12/25 |
220 / 12 |
||
35 |
C/S |
8/8 |
2 |
12 |
|
код/2/6 |
12/25 |
220 / 12 |
36 |
C/S |
4/6 |
6 |
10 |
|
код/4/8 |
15/24 |
110 / 10 |
|
||||||||
37 |
R/R |
3/10 |
4 |
12 |
|
код/3/6 |
12/16 |
110 / 16 |
38 |
R/S |
1/12 |
4 |
10 |
|
имп/3 |
15/20 |
110 / 5 |
|
||||||||
39 |
C/S |
5/11 |
7 |
8 |
|
код/4/4 |
24/20 |
220 / 15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
28 |
|
|
|
Примечание: А0 – интерфейсы локальных сетей: связи с надсистемой / межконтроллерной связи (R – RS-485, C – CAN на 24 В, I – I2C, S – SPI); А1 – количество/разрядность дискретных выходов; А2 – количество сигналов от аналоговых датчиков напряжения (медленно меняющийся однополярный сигнал, амплитуда – 10 В); А3 – разрядность АЦП; А4 – тип/количество/разрядность цифровых датчиков; А5 – характеристики исполнительных устройств (постоянное напряжение/ток, замыкание контакта, активно-индуктивная нагрузка); А6 – характеристики исполнительных устройств технологического оборудования (переменное напряжение/ток, замыкание контакта при переходе тока нагрузки через ноль).
В ТЗ следует добавить также (под заголовком «Дополни-
тельные связи»): а) 20 входов для связи с дискретными датчиками состояния технологического оборудования типа механический заземляющий контакт, б) три выхода сигналов с ШИМ. Ниже в текстовой форме следует указать списком требования к пара-
метрам используемых МК: наличие оперативной памяти объемом не менее 2К байт, памяти программ (ПЗУ или Flash) – не менее 32К слов для каждого, памяти констант – (EEPROM или аналогичной) 256 байт, наличие контроля работоспособности каждого МК (watch-dog) с обнулением всех выходов на оборудование при сбое, минимальная стоимость (наибольшая простота).
Для более детального изучения тематики проектирования некоторым студентам могут быть выданы особые задания.
4. Порядок и указания по выполнению проекта
4.1. Общая схема выполнения проекта а) На первом этапе устройство представляется функцио-
нально, в виде некоего «черного ящика», но со всеми необходимыми внешними связями, конкретизируются и уточняются требования задания на проектирование. Следует изобразить прямоугольник и его связи в виде стрелок в нужном направлении (ука-
29
зания см. ниже). Функциональное представление МКСУ помещается на листе задания пояснительной записки к проекту после выписки из таблицы заданий на проектирование (см. п. 4.2).
б) Следующий этап проектирования – составление
структурной схемы.
При проектировании устройства управления на микроконтроллерах необходимо спроектировать четырехконтроллерную схему управления, три контроллера К1…К3 в которой управляют звеньями робота (нижний уровень – НУ), один (К0) реализует верхний уровень ВУ и управляет технологическим оборудованием. Каждый контроллер может состоять из единственного микроконтроллера МК или из МК с дополнительными элементами сопряжения – см. ниже. Все контроллеры координат робота через локальную сеть взаимодействуют с КВУ, а он – с СУ более высокого уровня иерархии (обычно по последовательному каналу). Структурная схема МКСУ помещается в пояснительной записке к проекту. Детальные рекомендации см. ниже.
в) На следующем этапе по разработанной структурной схе-
ме разрабатывается принципиальная схема системы управле-
ния. В схеме должна быть обеспечена реализация каждого контроллера, наличие всех предусмотренных сигналов, обеспечено соответствие входных и выходных цепей рекомендациям стандартов (см. [12, 13, 14]), если в задании не указано иное.
Первой стадией этапа является выбор микроконтроллеров. Основная цель выбора – максимальная интегрализация структуры контроллера, т.е. максимальное сосредоточение всех нужных функций в кристалле МК. Поскольку в задании не приведена конкретная модель МК, следует выбрать модели самостоятельно, причем отдельно для ВУ и НУ (в пределах заданного семейства) как указано ниже.
30