

2018
.pdfКод, подаваемый на ЦАП, формируется по определенному алгоритму, но всегда представляет собой последовательность значений, устанавливаемых через определенные промежутки времени. Понятно, что основным недостатком этих АЦП является низкое быстродействие, поскольку преобразование в них выполняется за множество тактов. Однако это компенсируется минимальным количеством аппаратных средств.
Приведем основные сведения только о последовательном АЦП напряжение-код, работающем по алгоритму поразрядно-
|
|
|
|
|
|
|
ИОН |
ЦАП |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
DAC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
UВХ |
|
UОП |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
КН |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
=U |
|
|
РД |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ГТИ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
G |
|
|
|
RG |
РПП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
+1 |
|
|
|
|
|
|
|
|
|
|
|
|
RG |
Данные |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Запуск |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|||
|
|
|
ST |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
преобр. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
OE |
|
Конец |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Разрешение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
преобр. |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
вывода |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.2
го уравновешивания, который исследуется в данной работе.
Структура АЦП поразрядного уравновешивания
На рис. 4.2 дана обобщенная структурная схема такого АЦП напряжения, в которой обозначено: ГТИ – генератор так-
61
товых импульсов; ИОН – источник опорного напряжения; РПП – регистр последовательного приближения; РД – регистр хранения данных; ЦАП – цифроаналоговый преобразователь; КН – компаратор напряжений.
РПП включает в себя сдвиговый регистр («бегущая единица»), регистр хранения промежуточного результата и логические цепи, управляющие каждым битом результата в соответствии с алгоритмом, описанным ниже. Вместе с буферным регистром данных РПП образует блок формирования кодов.
На рисунке на показаны цепи обнуления регистров перед новым циклом преобразования.
Принцип действия АЦП проиллюстрирован на диаграмме (рис. 4.3). Начало преобразования задает сигнал «Запуск», который устанавливает регистр последовательного приближения в состояние 10000000. При этом на выходе ЦАП формируется напряжение, равное половине опорного. Компаратор сравнивает измеряемое напряжение с напряжением ЦАП. Если UВХ > UОП, то в регистре последовательного приближения формируется следующий код сравнения, равный 11000000. Если UВХ < UОП, то старший разряд регистра последовательного приближения устанавливается в «0», следующий код сравнения равен 01000000. Таким образом, на первом такте измеряемое напряжение сравнивается с эталонным значением U/2.
Далее разряды включения весов ЦАПН устанавливаются последовательно, начиная со старшего, т.е. аналогичные действия выполняются в каждом из тактов преобразования, причем значение напряжения сравнения зависит от результатов сравнения в предыдущих тактах. В примере рис. 4.3 на втором такте напряжение сравнения UЦАП равно U/2 + U/4, на третьем такте – U/2+ + U/4 + U/8, а на четвертом – U/2 + U/4 + U/16, поскольку на третьем такте было установлено, что UВХ < U/2 + U/4 + U/8 и т.д. Сложившийся в результате код соответствует измеренному напряжению. Сигнал на выходе компаратора напряжений на рис. 4.3 не показан, его вид уча-
62
щимся предстоит изучить самостоятельно в ходе экспериментов. Точность аналого-цифрового преобразования определяется разрешающей способностью блока ЦАП (8-12 разрядов).
Интервал преобразования состоит из n тактов: один такт для получения каждого двоичного разряда слова результата.
63

За- |
|
|
|
|
|
|
|
|
|
|
пуск |
|
|
|
|
|
|
|
|
|
|
ТИ |
|
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
t |
Uоп |
|
|
UЦАП |
|
|
|
|
|
|
|
|
Uвх |
|
|
|
|
|
|
|
|
|
7Uоп/8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3Uоп/4 |
|
|
|
|
|
|
|
|
|
|
Uоп/2 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
Старший разряд |
|
||||||||||
|
0 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
|
|
|
|||||||||
|
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
|
|
0 |
0 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
. . . . . . |
|
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
|
|
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
|
|
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
|
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
Младший разряд |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
|
|
|
|
|
|
|
|
Подбор |
t |
|
|
|
|
|
|
|
|
|
|
|
Старший разряд |
выходы |
|
|
|
|
|
|
|
|
|
|
Цифровые |
|
|
|
|
|
|
|
|
|
. . . . . . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Младший разряд |
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
Рис. 4.3 |
|
|
|
||
|
|
|
|
|
|
64 |
|
|
|
|

Длительность такта преобразования задает генератор тактовых импульсов. Время преобразования составляет n+1 такт, последний цикл используется для формирования сигнала готовности («Конец преобр.»).
Состав и функционирование ЦАП может быть различным, в том числе аналогичным рассмотренному в работе № 3.
При использовании АЦП в составе системы управления он управляется по разрешению генератора импульсов ГТИ (рис. 4.4) адресом А1 (в цикле WR), информация результатов преобразования считывается из блока формирования кодов по адресу А2 через шину данных D. Возможно и использование единого адреса А: при записи – для пуска ГТИ, при чтении – для вывода данных.
|
|
|
ИОН |
|
|
ЦАП |
|
|
|
|
|
КН |
|
|||||
|
|
|
|
|
|
|
UВХ |
|
||||||||||
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
+ |
|
- |
|
|
|
|
|
|
|
|
|||||
A1 |
|
|
|
|
|
|
|
P |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ST ГТИ |
|
|
|
БФК |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
WR |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RD
D
A2
Рис. 4.4
В данной структурной схеме показано также, что в двухполярных преобразователях каждый цикл преобразования начинается с определения полярности измеряемого напряжения, при котором все разряды ЦАПН установлены в ноль и по выходному сигналу компаратора устройство управления включает на выходе источника опорного напряжения положительное или отрицательное напряжение для ЦАПН.
65

Статические параметры АЦП
По своей природе АЦП вносит ошибку квантования. Это потерянная информация, поскольку для непрерывного аналогового сигнала должна быть бесконечной разрешающая способность преобразователя, а реально АЦП имеет конечное число разрядов кодирования. Чем выше разрядность АЦП, тем больше разрешающая способность, тем меньше приходится информации на ошибку квантования.
Прохождение сигнала по цепи приборов накапливает суммарную ошибку. Важно, чтобы она не была ниже некоторого предела. Часто АЦП является ключевым компонентом схемы, поэтому выбор преобразователя требует максимального внимания. Точность АЦП зависит от нескольких ключевых условий, которые включают: ошибку интегральной нелинейности, смещение, ошибку от коэффициента передачи, точность опорного напряжения, температурный коэффициент, характеристики прибора по переменному току.
Рассмотрим основные погрешности выходного значения АЦП и их источники .
Существует два известных способа для представления
полной системной ошибки (ПСИ):
1) Среднеквадратичная ошибка:
ПСИ = (Е12+Е22+Е32+…+Еn2)½,
где Еk – составляющая конкретного параметра схемы. Этот метод наиболее точен, если все составляющие ошибки некоррелированны.
2) Максимальная абсолютная ошибка – это ошибка худшего случая. Здесь все составляющие ошибки суммируются. Этот метод представления ПСИ гарантирует, что ошибка никогда не
) При рассмотрении статических погрешностей имеются в виду значения установившихся сигналов.
66
будет превышать указанный предел. Фактическая ошибка всегда меньше вычисленного значения, а часто и гораздо меньше.
Нет жестких правил применения какого-то метода расчета. Для анализа будем использовать ошибку худшего случая. К примеру, если нужна точность 0,1% или 1/210, то имеет смысл выбрать преобразователь с большей разрешающей способностью, чем необходимо, например, АЦП на 12 разрядов. Хотя это и не гарантирует выполнение преобразования с 12разрядной точностью, так как интегральная ошибка нелинейности может составлять 4 единицы МЗР, но при этом будет достигнута точность 10-разрядного АЦП.
Допуская 0,075% (11 разрядов) на преобразователь, 0,025% относим на интерфейс схемы (датчики, операционные усилители, мультиплексоры и т.д.). Считаем, что полная ошибка будет состоять из суммы составляющих ошибки каждого компонента схемы по цепи прохождения сигнала.
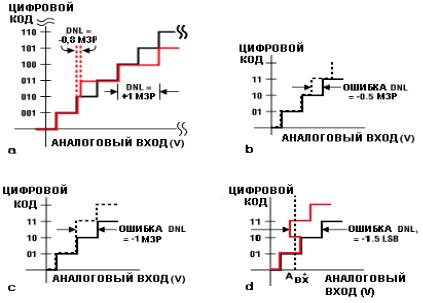
Дифференциальная нелинейность DNL показывает, как изменение во входном аналоговом сигнале преобразовывается в единицу значащего младшего разряда. Другими словами, на какую величину изменится аналоговый сигнал при очередном изменении выходного кода на 1МЗР ( рис. 4.5).
Нормально работающий АЦП не допускает пропуска кода при подаче аналогового сигнала во всем диапазоне входного напряжения. Из рис. 4.5 видно, что уже при ошибке DNL=±1МЗР нет гарантии, что все коды будут присутствовать. Только учитывая, что при заводских испытаниях тесты более жесткие, чем это указано в ТУ, ошибка ±1МЗР обычно не дает потери кода. Если DNL больше, чем ±1МЗР, АЦП обязательно будет иметь отсутствующие коды. Чтобы этого избежать, используют АЦП с повышенной разрядностью. Например, если нужен 13-разрядный АЦП, используется дешевый 16-разряд- ный с DNL ошибкой ±4МЗР (преобразователь соответствует 14 разрядам). И это будет выгоднее, чем использовать 16разрядный АЦП с DNL ±1МЗР.
67
Интегральная нелинейность INL определяется как инте-
грал ошибок DNL. Ошибка INL показывает, как далеко от идеальной функции происходит передача результата преобразования. Так INL-ошибка, составляющая ±2МЗР для 12-разрядного АЦП, означает, что значение максимальной ошибки нелинейности равно 2:4096 или 0,05%. С INL ±0,5МЗР точность составляет 0,012%. Надо отметить, что ошибки INL не могут быть легко откалиброваны или скорректированы.
Ошибки смещения и коэффициента передачи могут быть легко откалиброваны при использовании микропроцессора. В биполярных системах ошибка смещения перемещает функцию передачи, но не уменьшает число доступных кодов.
Рис. 4.5. К определению DNL:
a) коды не пропадают; b) коды не пропадают; c) код 10 потерян; d) в точке A*ВХ цифровой код может иметь одно из трех возможных значений. Когда входное напряжение колеблется, код 10 будет потерян.
68
Коррекция ошибок выполняется по следующей методике. На вход АЦП подают нулевое напряжение. Результат преобразования представляет биполярную ошибку смещения нуля. Делая преобразование во всем диапазоне входных напряжений, передвигая ошибку смещения в ноль по осям напряжение/код, получим линию 2 (калибровка смещения). Используя точку А (рис. 4.6) как шарнир, поворачиваем всю линию до положения, параллельного идеальной линии передачи. Здесь опять потребуется смещение полученной линии до совпадения с идеальной. Во всех этих случаях ступенчатая функция заменяется непрерывной линией, так как размер одного шага мал.
Ошибка коэффициента передачи определяется как разность полной шкалы (FS) и ошибки смещения (рис. 4.7). Ошибка коэффициента передачи легко корректируется в программном обеспечении с помощью линейной функции у = (m1/m2)х(Х), где: m1 – коэффициент наклона для идеальной передаточной функции, а m2 – для измеряемой передаточной функции.
Шум граничных кодов – количество шума, который появляется при переходе передаточной функции от одного значения к следующему. В технических данных обычно не указывается. Особенно это касается АЦП с высоким разрешением (до 16 разрядов), у которых единица МЗР имеет меньшее весовое значение и шум граничных кодов более распространен. Иногда величина шума граничных кодов может достигать нескольких единиц МЗР. В этом случае преобразование анало-
гового сигнала может закончиться кодовым мерцанием в
младших
69

Рис. 4.6. Корректировка ошибки смещения и коэффициента передачи
Рис. 4.7.
70