

2797.Метод регистрации сигналов акустической эмиссии применительно к иссл
..pdf4.2. Параметры определения импульса
Duration Discrimination Time ((DDT) – время ограничения длительности) определяет регистрацию конца АЭ импульса. Если в течение DDT не регистрируется пересечений порога, то отмечается конец импульса. DDT запускается в тот момент, когда уровень сигнала опускается ниже порога и, если не заканчивается, перезапускается со следующим пересечением порога. Если же DDT заканчивается, то сохраняется время последнего пересечения порога. Длительность импульса вычисляется, как «время последнего пересечения порога» минус «время первого пересечения порога».
Rearm Time ((RAT) – время перевооружения) определяет период, по истечении которого канал АЭ-системы должен быть готов регистрировать новый импульс. RAT запускается, как только уровень сигнала опускается ниже порога. RAT заканчивается, когда по его истечении не зарегистрировано ни одного пересечения порога. Когда RAT заканчивается, импульс закрывается, и следующее пересечение порога запускает процесс регистрации нового импульса или каскада импульсов. Если в течение RAT регистрируется превышение порога, RAT перезапускается. Если превышение порога регистрируется в течение DDT, RAT также перезапускается.
Рис. 10. Типовой сигнал АЭ с указанием на нём параметров определения импульса
21
Если пересечение порога – место после окончания DDT, но
втечение RAT, то параметры такого сигнала регистрируются как параметры каскадного импульса – Cascaded Hits (количество импульсов в каскаде), Cascaded Counts (количество выбросов
вкаскаде) и Cascaded Energy (энергия каскада).
Для системы AMSY-6 диапазон DDT составляет от 50 мкс до 6,5535 мс, RAT – от 50,2 мкс до 98 мс. DDT всегда, по крайней мере, на 200 нс меньше, чем параметр RAT.
Trigger (запуск) определяет способ запуска записи данных динамических процессов (TR-данных). Может иметь значения
Normal, Master, Slave или Pool (Нормальный, Ведущий, Ведо-
мый или Триггер группы):
–Normal (нормальный): запись данных запускается с первым пересечением порога импульсов в данном канале.
–Master (ведущий): первое пересечение порога в канале запускает его собственный рекордер, а также TR-рекордеры каналов, сконфигурированных как Slaveили Pool («Ведомый» или «Триггер группы»). TR-рекордер канала, сконфигурированный как Master, не может быть запущен никаким другим каналом.
–Slave (ведомый): TR-рекордер канала, сконфигурированного как Slave, не может быть запущен иначе, как другим каналом. TR-рекордер Slave-канала может быть запущен первым пересечением порога импульсом в любом Masterили Pool-канале.
–Pool (триггер группы): если сигнал на данном канале превысит порог до других каналов группы, он запускает как собственный рекордер, так и TR-рекордеры всех каналов, сконфигурированных как Slave или Pool. При использовании Триггера группы канал, зарегистрировавший первый импульс, становится «Ведущим», а все остальные каналы группы – «Ведомыми». TRрекордер Pool канала может быть запущен первым пересечением порога импульсом в любом Masterили Pool-канале.
Root Mean Square (RMS) – среднеквадратическое значение) представляет собой значение RMS в мВ перед соответствующим импульсом. Значение RMS-сигнала между двумя импульсами (период времени между окончанием регистрации одного и началом
22
регистрации другого) постоянно оценивается и сохраняется со следующим импульсом как результат вычисления RMS. RMS даёт информациюобуровненепрерывногоАЭ-сигналаниже порога.
Параметры порога влияют на максимально возможное значение RMS. Чем меньше порог, тем меньше значение RMS, которое может быть получено. Компоненты сигнала выше порога всегда являются частью импульса. Влиять на значение RMS могут только те компоненты сигнала, которые ниже порога и имеют место между импульсами.
Для порога 34 дБ (= 50 мкВ) не может быть получено значение RMS больше 20 мкВ.
Частота дискретизации для вычисления RMS составляет 5 МГц.
Threshold/noise (отношение порога к шуму) позволяет задавать плавающее значение порога регистрации сигналов АЭ. Если отношение равно 0, то значение порога будет фиксированным, иначе – порог изменяется в зависимости от значения RMS в соответствии со следующей формулой: THR = MAX (Threshold; 20×LOG(RMS[мкВ]×Thr/noise)).
Задайте отношение порога к шуму равным 5 для получения величины плавающего порога, равной (5×RMS [мкВ]), выраженной в дБ. Величина плавающего порога всегда больше или равна значению, заданному в поле Threshold [dB].
Например: если фиксированный порог равен 40 дБ, а отношение порога к шуму равно 5, то для RMS = 100 мкВ, порог будет равен 54 дБ согласно формуле 20*log(5*100) = 54 дБ. Если RMS = 10 мкВ, порог будет равен минимуму, заданному пользователем, – 40 дБ согласно формуле 20*log(50) = 34 дБ.
4.3. Параметры анализатора локаций
Система позволяет проводить линейную, планарную и объёмную локации источников АЭ за счёт разности прихода волны в разные точки объекта контроля. Минимальное количество преобразователей для планарной локации равно 3.
23

На рис. 11 представлено схематичное изображение определения местоположения источника при планарной локации.
Рис. 11. Планарная локация источника АЭ
Расстояние между вторым датчиком и источником можно определить следующим образом:
t1,2V R1 R2, |
|
(5) |
|
z R2sin , |
|
(6) |
|
z2 R12 (D R2)2 , |
|
(7) |
|
|
D2 t2 V 2 |
|
|
1,2 |
|
(8) |
|
R2 0,5 |
|
, |
|
t V Dcos |
|||
1,2 |
|
|
|
где R1 – расстояние между первым датчиком и источником; R2 – расстояние между вторым датчиком и источником; R3 – расстояние между третьим датчиком и источником; z – перпендикуляр к линии D; θ – угол между R2 и D; V – скорость распространения волны в материале; t1,2 – задержка времени прихода
между первым и вторым преобразователями.
24
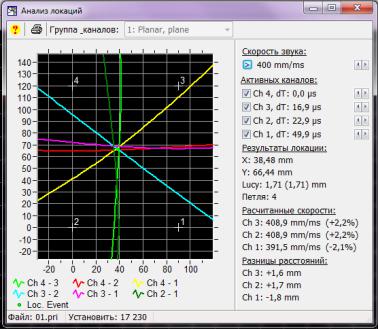
Рис. 12. Окно анализа точности локации
Location Analyzer (анализатор локации) является полезным инструментом оценки точности результатов локации при выполнении определения местоположения источников АЭ. На диаграмме ниже показаны гиперболы для планарной локации, использующей 4 преобразователя АЭ. Пересечение гипербол является результатом локации.
25
5. ЛАБОРАТОРНАЯ РАБОТА «ИСПЫТАНИЕ НА РАСТЯЖЕНИЕ ПЛОСКИХ ОБРАЗЦОВ С РЕГИСТРАЦИЕЙ
СИГНАЛОВ АКУСТИЧЕСКОЙ ЭМИССИИ»
Цель работы
Знакомство с методикой регистрации сигналов акустической эмиссии в процессе механических испытаний. Проведение последующей обработки зарегистрированных сигналов акустической эмиссии.
Объект исследования
Плоский образец в виде двусторонней «лопатки».
Испытательное оборудование
Универсальная электромеханическая испытательная система «Instron 5882», система регистрации сигналов акустической эмиссии «AMSY-6», штангенциркуль.
Содержание работы
Лабораторная работа включает в себя четыре основных этапа:
1.Подготовка образцов и испытательного оборудования.
2.Задание параметров регистрации сигналов с использованием специализированного программного обеспечения Vallen Acquisition32.
3.Проведение испытания и запись сигналов акустической эмиссии.
4.Обработка зарегистрированных сигналов акустической эмиссии.
Подготовка и проведение испытания осуществляются только в присутствии инженера, обслуживающего испытательную систему.
I. Подготовка образцов и испытательного оборудования Произвести замеры ширины, толщины, длины рабочей час-
ти образца с помощью штангенциркуля и занести полученные результаты в табл. 1.
26

Результаты замеров образца
|
Ширина, |
|
Длина рабочей |
Расстояние меж- |
№ п/п |
Толщина, мм |
ду датчиками |
||
|
мм |
|
части |
АЭ, мм |
|
|
|
|
|
1 |
|
|
|
|
Произвести сборку системы регистрации сигналов акустической эмиссии согласно рис. 13. Через параметрические каналы происходит синхронизация нагружающей системы с системой регистрации сигналов акустической эмиссии по значениям нагрузки и перемещений.
Рис. 13. Схема сборки системы регистрации сигналов акустической эмиссии
Установить образец в захваты нагружающей системы. Затем на образец через слой контактного геля с помощью специальных силиконовых зажимов на расстоянии 1 см от верхнего и нижнего захватов установить преобразователи акустической эмиссии, замерить расстояние между датчиками. Датчики должны крепиться на образец вплотную. При невозможности использования зажимов, датчики устанавливаются с помощью этилцианакрилатного клея.
27

Включить систему регистрации сигналов акустической эмиссии и запустить Vallen Control Panel.
II. Задание параметров регистрации сигналов с использованием специализированного программного обеспечения Vallen Acquisition
Для создания метода проведения испытания в программе Acquisition необходимо выполнить следующие действия:
1. В запущенной контрольной панели Vallen Control Panel запустить иконку Acquisition.
Рис. 14. Контрольная панель Vallen Control Panel
В окне Acquisition (рис. 15) во вкладке Hardware Detection (step 1) отображаются аппаратные средства и конфигурация каналов используемой системы.
28

Рис. 15. Окно Acquisition
2. Для создания нового файла нажать на вкладку File (step 2), задать имя файла «метод 1» и нажать на кнопку «Открыть» в правом нижнем углу.
ВпоявившимсяокнеConfirm (рис. 16) нажатькнопку «Yes».
Окно Select Acquisition Settings (рис. 17) предлагает вы-
брать основные настройки метода, загрузив их из библиотеки (Library…), из ранее использованного метода (Browse…) или из предлагаемых шаблонных файлов (Factory Defaults…).
Необходимо загрузить настройки из ранее использованного файла. Нажать кнопку «Browse…», выбрать файл «шаблон» и нажать кнопку «Открыть» в правом нижнем углу. Появится ок-
но Acquisition Parameter Setup (step 3).
3. В окне Acquisition Parameter Setup во вкладке General Settings (Общие настройки) (рис. 18) проверить правильность выставленных настроек. TR Recording enabled (запись TR-данных разрешена) – стоит галочка; Sample rate (частота регистрации данных) – 10, 000 MHz; Sample perset (выборокнанабор) – 2 048.
29

Рис. 16. Создание нового метода. Окно Confirm
Рис. 17. Создание нового метода. Выбор настроек
30