

Моделирование электротехнических систем и систем автоматики
..pdfключается соответственно к входу с обозначением ÷. В позиции Signal Attributes также устанавливаются пределы полученного результата, границы его округления и тип.
Для реализации функции интегрирования в аналитических моделях используется модуль Integrator, раскрытие окна установки параметров для этого модуля производится уже известным способом. Вид этого окна показан на рис. 51. В позиции External reset этого меню выбираются варианты внешнего воздействия на процесс интегрирования. Следующая позиция Initial condition source этого окна обеспечивает выбор типа интегрирования (в определенном или неопределенном варианте), при этом при выборе варианта «с пределом» нужно установить отметку в позиции Limit output. Верхний и нижний предел интегрирования устанавливается соответственно в позициях Upper saturation limit и Lower saturation limit.
Рис. 51. Окно для установки значения параметра модуля типа Integrator
101
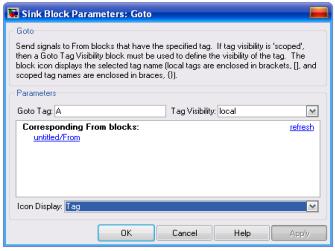
Для упрощения структурных связей в алгоритме модели промежуточный результат может быть сохранен функциональным модулем типа Goto и снова введен в нужном месте другим модулем From.
Окно установки параметров для модуля Goto показано на рис. 52. В позиции Goto Tag записывается имя параметра, под которым он функционирует в этом элементе (обычно это буквы латинского алфавита). В позиции Tag Visibility устанавливаются признаки видимости параметров этого блока в алгоритме модели. Они могут быть локальными – local, ограниченными – scope и глобальными – global.
Рис. 52. Окно для установки значения параметров модуля типа Goto
Окно установки параметров для модуля From организовано аналогично и должно повторять все настройки параметров мо-
дуля Goto.
В процессе отладки алгоритма аналитической модели часто используют модуль Display, который предназначен для вывода
102
числового результата и может быть установлен в любом месте ее алгоритма. Окно установки параметров для модуля содержит позицию Format, в которой устанавливается формат выводимых данных.
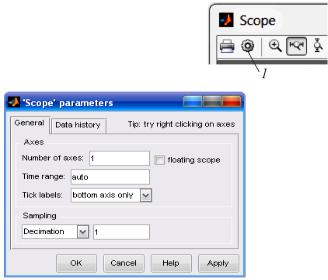
Для вывода графического результата моделирования используется осциллографический регистратор Scope, который при установке на его контуре курсора и последующем двойном щелчке левой клавишей «мыши» преобразуется в экранную форму, на которой появляются клавиши его настройки и выбора режима работы.
Модуль Scope может содержать несколько экранов. Для их установки необходимо поместить курсор на кнопку 1, расположенную на контуре раскрытого регистратора и дважды щелкнуть по ней левой клавишей «мыши».
При этом появляется окно установки параметров регистратора (рис. 53). В позиции Number of axes этого окна нужно установить необходимое число экранов.
Рис. 53. Окно для установки параметров регистратор Scope
С помощью модулей Scope при работе аналитической модели можно регистрировать графический результат изменения
103
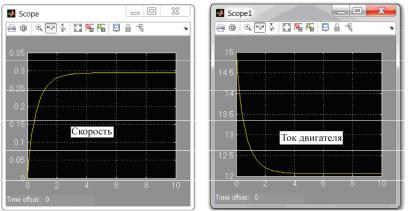
Рис. 54. Изменение скорости и тока двигателя при пуске электровоза
любого параметра. В модели, представленной на рис. 48 на развернутые экраны модулей Scope и Scope1 выводятся графики изменения скорости электровоза и пускового тока двигателя. Вид графиков на этих экранах показан на рис. 54.
8.1.2.Способы взаимосвязи модулей
валгоритме модели
Проблемы взаимосвязи модулей в алгоритме модели, разработанной инструментальными средствами одной библиотеки, возникают только в случае стыковки элементов модели с различными типами сигналов. Примером может служить фрагмент модели, представленный на рис. 55.
Алгоритм этой модели исследует процесс передачи разнотипной информации по единому каналу связи. Реально такой процесс может наблюдаться в канале связи диспетчера с операторской станцией шахтной конвейерной линии.
В этой модели канал связи имитируется двумя соединенными между собой модулями Bus Creator (1) и Bus Selector (2). Модуль 1 воспринимает информацию от элементов модели в начале канала связи. Модуль 2 передает эту информацию эле-
104

ментам модели, расположенным по другую сторону этого канала. Направление передачи информации всегда одностороннее, от модуля 1 к модулю 2. В этой модели по каналу связи могут быть переданы только два различных по типу сигнала.
Рис. 55. Структура аналитической модели передачи сигналов разного типа по каналу связи
Первый из сигналов, формируемый на входе канала связи, относится по типу к модулированным через сумматор непрерывным сигналам. Второй сигнал на входе канала связи состоит из набора целочисленных переменных, которые подаются на вход модуля Mux. Этот модуль записывает сигналы в последовательный ряд и подает их на вход модуля Data Tape Conversion, который преобразует эту цифровую последовательность в один цифровой сигнал в формате int8.
На выходе канала связи первый сигнал непосредственно регистрируется в виде графика осциллографом Scope. Второй сигнал сначала поступает на вход дешифратора Demux, который разделяет его на три сигнала и направляет на соответствующий
105
дисплей. Каждый из этих дисплеев регистрирует входной сигнал в форме двоичного слова.
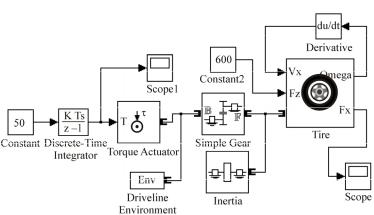
Проблемы взаимосвязи структурных элементов в алгоритме модели, составленной из модулей, расположенных в разных программных пакетах или в разных библиотечных приложениях одного и того же программного пакета, решаются через специальные соединительные модули. Примером может служить модель, структура которой показана на рис. 56.
Эта модель предназначена для определения закономерности влияния силы сцепления Fx приводного колеса электровоза с рельсом на величину тягового усилия и момента его привода.
Рис. 56. Структура модели для исследования влияния силы сцепления колеса с рельсом на величину тягового усилия и момента двигателя электровоза
Особенностью этой модели является то, что она состоит из объектных модулей, расположенных в различных библиотекахприложениях программного пакета МАТLAB. Механическая часть этой модели формируется из модулей, расположенных в приложении Simscape, Mechanics. При этом связь между модулями механического типа выполняется через специальные узловые точки, к которым не могут быть подключены модули из инструментального набора другого приложения Simulink.
106
В механическую часть этой модели встроен модуль Tire, который имитирует характер взаимодействия ходового колеса с опорной поверхностью (в нашем случае с рельсом). Этот элемент имеет входы для сигналов различного типа. Механический сигнал на этот элемент поступает через особый вход, связывающий его с элементами Simple Gear (редуктор) и Inertia (элемент инерции).
Сигналы управления и результата моделирования имеют тип, который формируется и воспринимается инструментальными средствами (модулями) приложения Simulink. Сигналом этого типа в модели является величина вращающего момента, который формируется совместно модулями Constant и DiscreteTime Integrator и передается на вход модуля Torque Actuator. Этот модуль предназначен для преобразования сигналов одного типа (сигналов управления) в другой (механический) тип, формируя при этом соответствующий уровень момента вращения приводного колеса на модуле Tire.
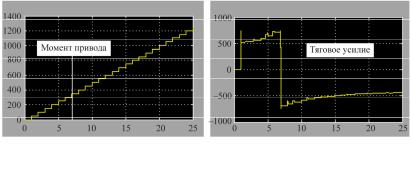
Результат моделирования снимается с выхода Fx этого модуля и передается затем регистратору Scope. Другим регистратором Scope1 контролируется изменение величины сигнала вращающего момента на выходе модуля Discrete-Time Integrator. Результат исследования этого процесса показан на графиках рис. 57.
Рис. 57. Характер изменения сигналов на входе и выходе модели, показанной на рис. 56
107
Анализ этих графиков показывает, что рост тягового усилия ходового колеса наблюдается только до некоторого предела ступенчатого увеличения вращающего момента на этом колесе. После достижения этого предела дальнейшее увеличение вращающего момента приводит к срыву сцепления колеса с рельсом, в результате чего усилие Fx из тягового типа переходит в тормозной тип. В этом случае колесо начинает скользить вниз по наклонной опорной поверхности, а сила Fx препятствует этому скольжению.
8.2. Принципы построения объектно-модульных моделей имитационного типа
При разработке моделей имитационного типа способы выбора функциональных модулей и задания их параметров остаются такими же, как и для модулей моделей аналитического вида. Однако для этих моделей существуют определенные отличия в способах взаимопривязки функциональных модулей в алгоритме модели. Эти отличия объясняются прежде всего различной формой реализации таких моделей. Имитационные модели могут быть разработаны как в виде электрических схем, так и в форме моделей имитации определенных физических процессов.
8.2.1.Способы взаимосвязи функциональных модулей
вимитационных моделях схемного типа
Имитационные модели схемного типа могут быть созданы инструментальными средствами нескольких программных пакетов, среди которых чаще всего используются пакеты: Electronics Workbench и Multisim.
Примером может быть модель частотного преобразователя, разработанная в программном пакете Electronics Workbench. Схема такой модели показана на рис. 58.
108
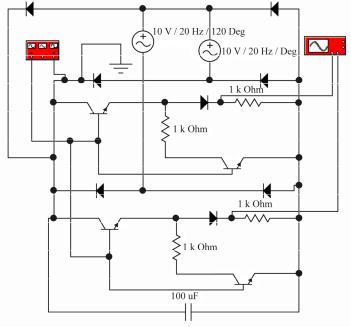
Рис. 58. Схема модели частотного преобразователя
Эта модель состоит из структурных элементов (функциональных модулей), которые входят в структурный набор инструментальных средств программного пакета Electronics Workbenchи и соединяются между собой согласно принципиальной схеме этой модели. Соединение этих элементов производится через линии, которые проводятся курсором через соединительные точки. Эти точки автоматически формируются программой Electronics Workbench.
Линии соединения будут зафиксированы на схеме модели только тогда, когда они проходят через соединительные точки, и только в том случае, если соединяемые элементы совместимы между собой по типу передаваемого сигнала. Если элементы схемы несовместимы по типу сигнала, то при попытке их соединения соединительная линия между модулями становится
109
пунктирной и окрашивается в красный цвет. В случае несовместимости модулей линия соединения между ними исчезает после снятия с нее курсора. Такая форма контроля соединения модулей позволяет исключать ошибки несовместимости данных в моделях данного типа и обеспечивает передачу по линиям связи только однотипных сигналов.
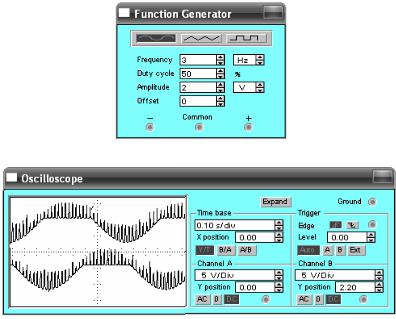
В моделях схемного типа уровень сигналов задается специальными модулями, имитирующими работу источников тока или напряжения, таких как батареи, электрогенераторы. Цифровые сигналы формируются функциональными генераторами. Для регистрации результата моделирования в моделях данного типа предусмотрены модули-осциллографы или цифровые регистраторы. Некоторые типы таких модулей показаны на рис. 59.
а
б
Рис. 59. Функциональные модули ввода параметров и вывода результата модели
110