

Червячный редуктор
Червячная передача передает вращательное
движение между валами, геометрические
оси которых перекрещиваются чаще всего
под углом …. Она позволяет осуществить
большие передаточные отношения от 5 до
1500 при помощи одной пары. Червячная
передача построена на базе реечного
эвольвентного зацепления. Профилем
винтовой нарезки червяка служит исходный
контур нормального эвольвентного
зацепления, для которого
![]() .
.
Червячные передачи работают плавно и бесшумно, при малых боковых зазорах в зацеплении.
К недостаткам червячных передач по сравнению с зубчатыми относятся низкий КПД (из-за больших потерь на трение в зацеплении витков червяка с зубьями червячного колеса) и необходимость по этой причине выполнять червячные колеса или их зубчатые венцы из дорогостоящих антифрикционных материалов (например, из бронзы).
Наиболее распространены червячные передачи, в которых ведущим кинематическим звеном является червяк.
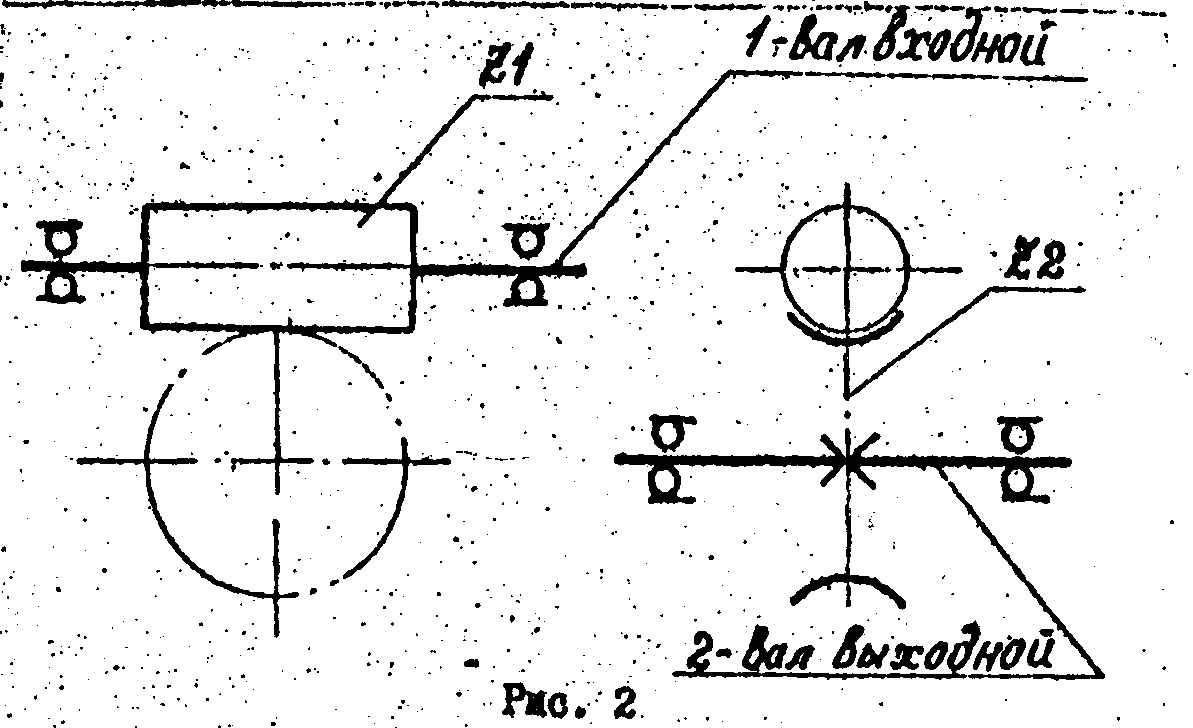
Кинематическая схема исследуемого одноступенчатого червячного редуктора с ведущим червяком представлена на рис. 2. Передаточное отношение такого редуктора равно:
![]() (14)
(14)
где n1— частота вращения червяка, об/мин;n2— частота вращения червячного колеса об/мин;Z1— число заходов червяка;Z2— число зубьев червячного колеса.
Зависимость между моментов M1,
действующим на червяк, и моментом на
червячном колесе![]() имеет вид
имеет вид
![]() (15)
(15)
где
![]() — коэффициент полезного действия
червячной передачи при ведущем червяке,
определяемый по формуле
— коэффициент полезного действия
червячной передачи при ведущем червяке,
определяемый по формуле
![]() (16)
(16)
где
![]() — угол подъема линии витка червяка,
— угол подъема линии витка червяка,
![]() ;q— коэффициент
диаметра червяка, зависящий от числа
заходов и угла
;q— коэффициент
диаметра червяка, зависящий от числа
заходов и угла![]() ;
;![]() — угол трения.
— угол трения.
Наиболее часто угол
![]() оказывается в пределах от
оказывается в пределах от![]() до
до![]() .
.
![]()
здесь f— коэффициент
трения между поверхностями червяка и
червячного колеса в точке их соприкосновения;![]() — угол профиля винтовой нарезки червяка.
— угол профиля винтовой нарезки червяка.
Для приборных червячных передач, работающих с ведущим червяком, с учетом влияния нагрузки КПД формула (16) имеет вид
![]() (17)
(17)
где
![]() ,
,![]() ;F2— окружное
усилие на червячном колесе, Н,
;F2— окружное
усилие на червячном колесе, Н,![]() ;d2— диаметр
начальной окружности червячного колеса,
;d2— диаметр
начальной окружности червячного колеса,![]() .
.
Общий КПД исследуемого редуктора определяется по формуле
![]() (18)
(18)
Для данного редуктора применяется пара
сталь-бронза, для которого коэффициент
трения
![]() ,
червях двухзаходный
,
червях двухзаходный![]() ,
число зубьев червячного колеса
,
число зубьев червячного колеса![]() ,
модуль передачи
,
модуль передачи![]() мм, параметр червяка
мм, параметр червяка![]() ,
,![]() ,
,![]() ,
,![]() .
.
Задавшись несколькими значениями
![]() (согласно варианту работы), можно
определить КПД и построить теоретическую
зависимость
(согласно варианту работы), можно
определить КПД и построить теоретическую
зависимость![]() .
.
Планетарный редуктор
Планетарный редуктор представляет собой зубчато-рычажное устройство, в котором геометрические оси одного или нескольких колес перемещаются в пространстве. Планетарные передачи обладают рядом достоинств. Переход от обычных передач к планетарным обеспечивает снижение веса в 1,5-5 раз, приводит к уменьшению габаритов (при тех же передаточных отношениях). В зависимости от схемы планетарные передачи могут осуществлять передаточные отношения от 3 до 1000 при КПД от 0,98 до 0,01 соответственно. Ведущий и выходной валы расположены соосно.
Планетарный механизм состоит из трех частей:
солнечного колеса, геометрическая ось которого не изменяет своего положения в пространстве;
сателлита, геометрическая ось которого перемещается по окружности;
водила, поддерживающего ось сателлита при его вращении.
При работе планетарной передачи сателлит обегает вокруг солнечного колеса подобно тому, как планеты движутся вокруг солнца. Поэтому передача и называется планетарной.
Планетарные передачи могут быть использованы для сложения различных движений. В этом случае они называются дифференциалами.
Меньшие размеры и вес планетарных передач по сравнению с соответствующими зубчатыми передачами с неподвижными осями объясняются тем, что применение двух или трех сателлитов позволяет уменьшить нагрузку на зубья колес и использовать колеса с меньшими модулями и диаметрами. Передачи отличаются также высокой надежностью и малыми потерями на трение.
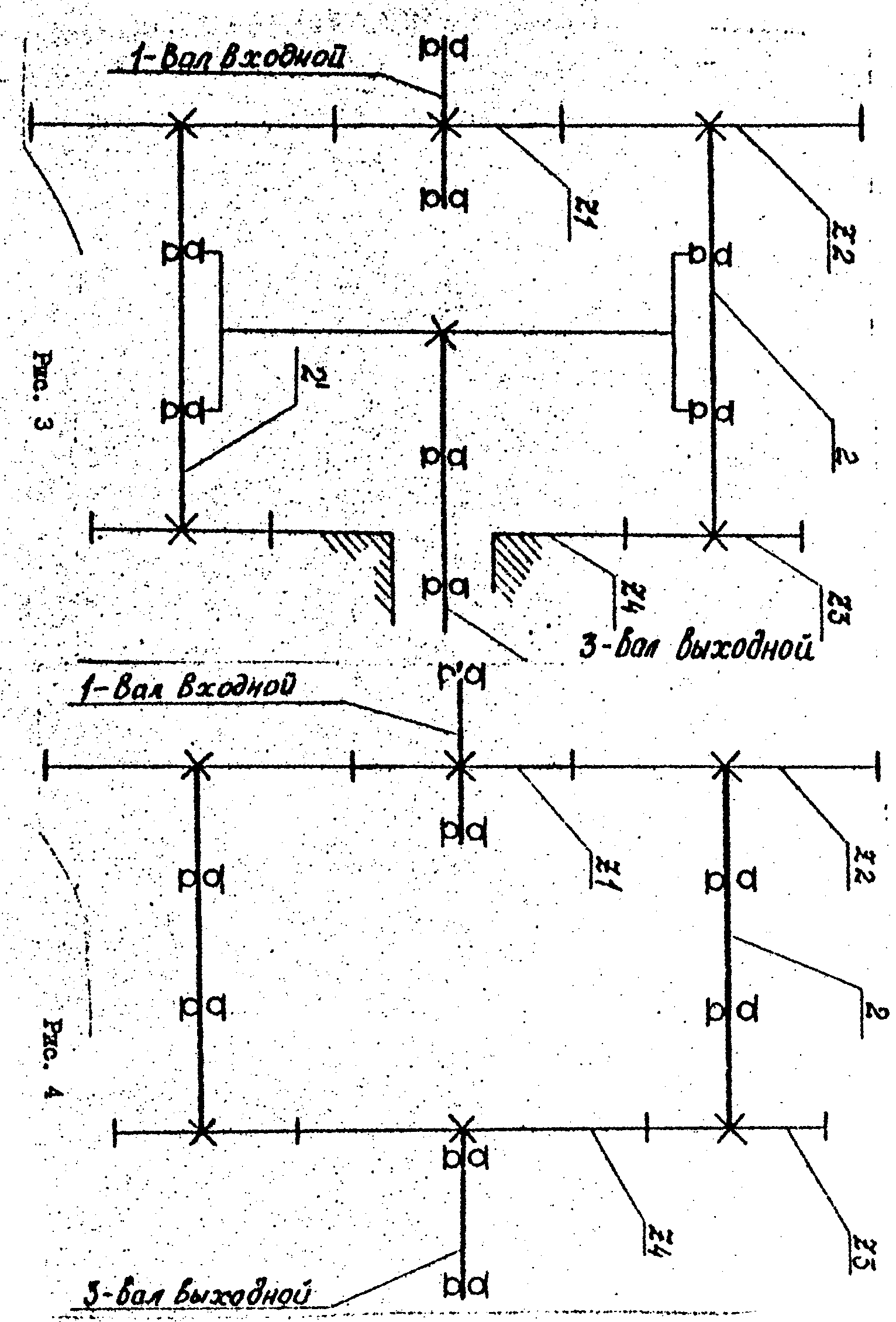
На рис. 3 показана кинематическая схема
планетарного редуктора, который
использован в лабораторной установке.
Он состоит из двух спаренных планетарных
передач. Солнечные колеса имеют числа
зубьев
![]() и
и![]() ,
причем колесоZ6неподвижно. Числа зубьев сателлитовZ2иZ3. Модуль
зацепления
,
причем колесоZ6неподвижно. Числа зубьев сателлитовZ2иZ3. Модуль
зацепления
![]() мм. Сателлиты жестко закреплены на общей
оси 2. Их угловые скорости одинаковы
мм. Сателлиты жестко закреплены на общей
оси 2. Их угловые скорости одинаковы![]() .
Водило (выходной вал) 3 поддерживает
перемещающуюся по окружности ось
сателлитов. Ведущим является солнечное
колесоZ1, ведомым
кинематическим звеном редуктора –
водило.
.
Водило (выходной вал) 3 поддерживает
перемещающуюся по окружности ось
сателлитов. Ведущим является солнечное
колесоZ1, ведомым
кинематическим звеном редуктора –
водило.
Передаточное отношение планетарного
механизма определяется методом
обращенного движения (остановки водила).
Условно всем звеньям механизма сообщается
дополнительное движение с угловой
скоростью водила
![]() ,
но в сторону, противоположную вращению
последнего. Кинематическая схема
обращенного механизма представлена на
рис. 4.
,
но в сторону, противоположную вращению
последнего. Кинематическая схема
обращенного механизма представлена на
рис. 4.
Для каждой из двух планетарных передач можно написать выражение основной формулы планетарной передачи
![]() ;
;![]()
где in1иin2— передаточные отношения планетарных
передач при неподвижном водиле;![]() и
и![]() — угловые скорости солнечных колесZ1иZ4(
— угловые скорости солнечных колесZ1иZ4(![]() );
);![]() — угловая скорость водила. Угловые
скорости берутся с учетом направления
вращения.
— угловая скорость водила. Угловые
скорости берутся с учетом направления
вращения.
Учитывая, что
![]() ,
получим
,
получим
![]() .
.
Тогда передаточное отношение планетарного редуктора равно
![]() (19)
(19)
Если водило остается неподвижным, то планетарный редуктор становится обычной зубчатой передачей с неподвижными осями. Его передаточное отношение равно
![]() (20)
(20)
Составим уравнение внешних моментов, действующих на планетарный редуктор
![]() (21)
(21)
где M1— момент солнечного колесаZ1;M4— реактивный момент солнечного колесаZ4;Mв— момент водила.
Коэффициент полезного действия обращенного механизма равен
![]()
откуда
![]() (22).
(22).
Моменты M1иM4имеют противоположные направления. Заменим в равенстве (22) его выражением из равенства (21)
![]()
Коэффициент полезного действия планетарного редуктора равен:
![]() (23)
(23)
При подсчете по формуле (23) передаточные
отношения планетарного редуктора
![]() и обращенного механизма определяются
по формулам (19) и (20). Коэффициент полезного
действия обращенного механизма
принимается равным
и обращенного механизма определяются
по формулам (19) и (20). Коэффициент полезного
действия обращенного механизма
принимается равным
![]() (24)
(24)
где
![]() и
и![]() — КПД первой и второй ступеней обращенного
механизма, определяемый по формулам
(11) и (12) для КПД эвольвентного зубчатого
зацепления.
— КПД первой и второй ступеней обращенного
механизма, определяемый по формулам
(11) и (12) для КПД эвольвентного зубчатого
зацепления.
О кружные
усилия в зацепления можно определить
из условия равновесия сил и моментов
относительно вала сателлитов 2 (рис. 5):
кружные
усилия в зацепления можно определить
из условия равновесия сил и моментов
относительно вала сателлитов 2 (рис. 5):
![]() (25)
(25)
![]() (26)
(26)
где r2— радиус сателлитаZ2;r3— радиус сателлитаZ3;F12— окружное усилие в зацеплении колесZ1иZ2;F34— окружное усилие в зацеплении колесZ3иZ4;
Fв— окружное усилие на водиле.
![]() (27)
(27)
Решая совместно уравнения (25) и (26) с учетом выражения (27), находим
![]() (28)
(28)
![]() (29)
(29)
Задаваясь несколькими значениями
момента нагрузки, т.е. момента Mв,
определим для каждого значенияF12иF34по формулам
(28) и (29). Затем находим![]() и
и![]() по формулам (11) и (12). Общий КПД планетарного
редуктора определяем из (23) и (6):
по формулам (11) и (12). Общий КПД планетарного
редуктора определяем из (23) и (6):
![]() (30)
(30)
где
![]() — КПД одной пары подшипников;
— КПД одной пары подшипников;![]() ;
;![]() — число пар подшипников.
— число пар подшипников.
По найденным значениям
![]() можно построить теоретическую зависимость
можно построить теоретическую зависимость
![]() .
.