

Твердотельное моделирование камеры ракетного двигателя с применением системы CATIA (120
..pdf. 8. !
) % 8 & Offset (% Operation) % &, @ & % . B ' %# & Tangent Propagation, % @ @-$ $ ' $ % ' , &8 '8 ; 8 Offset ' 5 . ) # % . +-% H $ $ ( . 9).
. 9. + H
11

С помощью команд Sketch Solving Status и Sketch Analysis
(панели инструментов Tools > 2D Analysis) определим статус контура и проведем анализ его построения – построен замкнутый профиль, состоящий из десяти кривых (рис. 10).
Рис. 10. Анализ профиля
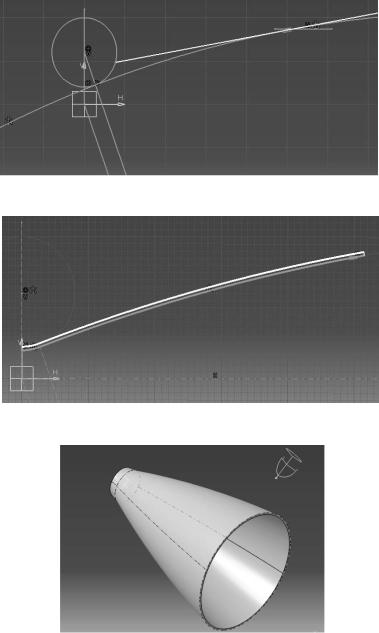
Перейдем теперь в режим построения твердотельной модели. С помощью команды построения тела вращения Shaft, расположенной на панели инструментов
Sketch-Based Features, построим твердотельную камеру, задав значения углов поворота сечения
360° и 0° (рис. 11).
Полученная модель корпуса камеры показана на рис. 12.
|
|
Сопло |
|
|
Построим |
теперь |
твердотель- |
Рис. 11. Диалоговое окно |
ную модель |
сверхзвуковой части |
|
сопла. Найдем центр |
окружности |
||
Shaft Definition |
сверхзвуковой части сопла большо- |
|
го радиуса. Для этого из начала координат проведем линию под углом –70° длиной Lc = = R2 + Rс = 80 + 2800 = 2880 мм, а затем из конца этойлинии отложимвертикальный отрезоквверх длиной120 мм.
12

. 12. $ %
) # < . % # %-< 'ó * R = 2800 , % %$& & % 10° @ < . +-, &8 % ( = 0), %$, &8 -$ % (Ya = Da/2 = 174 ). + - % $. %< %$. + @ & &. ) # @ %$. B- & % & Construction Element $ , %-$&8 @ % . = & 8$, % % % , < ' # . B % %$ % % . 13, @ % – . 14, %$$ % – . 15.
+ % % -$ % L, D, , R, L – $% , ; D – 8 % , ; –% , .
13
. 13. B % %$
. 14. %
. 15. $ %
14

|
|
! 1 |
|
|
! 2 |
|
$ |
L |
D |
|
L |
R |
|
1 |
0 |
80 |
0 |
0 |
40 |
22,524 |
2 |
2,242 |
82,629 |
30,649 |
4,323 |
41,908 |
24,674 |
3 |
9,813 |
92,090 |
32,819 |
17,169 |
48,169 |
26,849 |
4 |
62,754 |
163,927 |
33,846 |
42,035 |
61,020 |
27,362 |
5 |
185,452 |
307,540 |
26,826 |
72,089 |
76,129 |
25,792 |
6 |
366,668 |
461,490 |
19,743 |
106,444 |
91,816 |
23,248 |
7 |
596,064 |
601,349 |
14,209 |
158,683 |
112,232 |
19,506 |
8 |
863,398 |
714,113 |
10,084 |
308,196 |
153,254 |
11,774 |
9 |
1189,56 |
808,592 |
6,602 |
395,192 |
169,921 |
8,699 |
/=- ? @
) J" %$& $ ' , % @ $$ < ' ' ( . 16),. B ' $&$ < - ' % 8 & H % ( . 17). " ' *$ # . # $ - # ' * & &8 # .
. 16. = ' $ $$
15

. 17. H$ %
G @ ?
" ' %$ * - &$ $ H , % < %$ $( . 18). + $ ' H
. 18. X '
16

% &$ % $ &8 ' . + @ <$ % %$ ( # ) ' @ $.
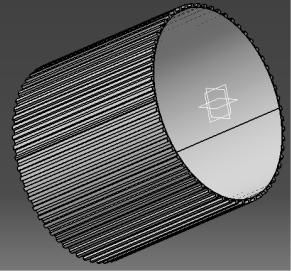
+ < @ ' -& %$ ( . 19), - % % # & H '$ $. + @
. 19. + @
< @ % 8 & Rotate, % < % Operation, %-% # & H '$, % & < % # & $ @ ( . 20). =% #$ H- '$ 8$ $ % 8 & Pocket, %- < % Sketch-Based Features.
. 20.
17
+$ $ ' %. 21.
. 21. $ '
G @ 3
H$ % ' & 8 , % @ ' H %-% 8 & $. B $ 8$ $ % & : Start > Mechanical Design > Wireframe and Surface Design. H & # & ' < % 8 & % $ $. $ @ % xy %% H H % . B %-yz % %$&8 & %$& &. +$ % 8 & Sweep, % < %Surfaces. + Sweep @ %$ $ Swept Surface Definition ( . 22). B % Profile 'Q , %- < 8 &, % Direction – 'Q , %$&- 8 % $ ( . 23).
18

. 22. Swept Surface Definition
1." ' & &8 # .
2." ' ' & # -8 ' ( . . 16).
3." ' H & % $ #-%$.
4.) % 8 & Thick Surface % -Surface-Based Features % 8 % %- .
19

. 23. H$ %
5." ' H & % $ *$&8 -$ % ( . . 17).
6." ' $ -# ' $, -% .
/= 3 /
+ & % H- , #$ % . 24.
1. + @ ( . 25). = 8$ %- < ' # .
20