

Определение кинематических характеристик механических систем с помощью теоремы об изменении кинетической энергии (90
..pdfМеханическая система, состоящая из двух грузов (1 и 4) и двух блоков (2 и 3),
связанных невесомыми нитями, начинает двигаться из состояния покоя под дейст-
вием сил тяжести. Массы тел соответственно равны m1 , m2 , m3 и m4 . Блоки име-
ют ступенчатую форму, радиусы инерции блоков равны i2 и i3 , радиусы ступеней -
R2 , R3 , r2 и r3 . На схемах 5,6,7,8,9,0 один из грузов движется по гладкой наклон-
ной плоскости, расположенной под углом к горизонту. Сопротивлением под-
шипников вращению блоков пренебречь.
Для заданной механической системы определить зависимость между скоро-
стью груза 1 и его перемещением, а также ускорение груза 1.
С помощью системы MathCAD построить график зависимости скорости груза
1 от его перемещения.
Таблица 1 – Исходные данные, соответствующие первой цифре варианта |
|
|
||||||||
|
|
|
|
Первая цифра варианта |
|
|
|
|||
Параметр |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
|
30˚ |
45˚ |
60˚ |
30˚ |
45˚ |
60˚ |
30˚ |
45˚ |
60˚ |
30˚ |
i2 |
|
|
|
|
|
|
|
|
|
|
r2 |
3 |
2 |
3 |
2 |
3 |
2 |
3 |
2 |
3 |
2 |
i3 |
|
|
|
|
|
|
|
|
|
|
r3 |
2 |
3 |
3 |
2 |
2 |
3 |
3 |
2 |
2 |
3 |
R2 |
|
|
|
|
|
|
|
|
|
|
r2 |
3 |
2 |
3 |
2 |
3 |
2 |
3 |
2 |
3 |
2 |
R3 |
|
|
|
|
|
|
|
|
|
|
r3 |
2 |
3 |
3 |
2 |
2 |
3 |
3 |
2 |
2 |
3 |
|
|
|
|
|
|
|
|
|
|
11 |
Таблица 2 – Исходные данные, соответствующие второй цифре варианта
|
|
|
|
Вторая цифра варианта |
|
|
|
|||
Пара- |
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
|
метр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m1 |
19m |
26m |
21m |
13m |
12m |
24m |
20m |
17m |
23m |
19m |
m2 |
7m |
3m |
4m |
18m |
9m |
22m |
15m |
5m |
m |
9m |
m3 |
11m |
17m |
8m |
15m |
4m |
2m |
3m |
18m |
9m |
8m |
m4 |
0,7m |
m |
0,8m |
0,6m |
0,5m |
0,9m |
m |
0,7m |
0,8m |
0,9m |
12
3 Пример выполнения лабораторной работы
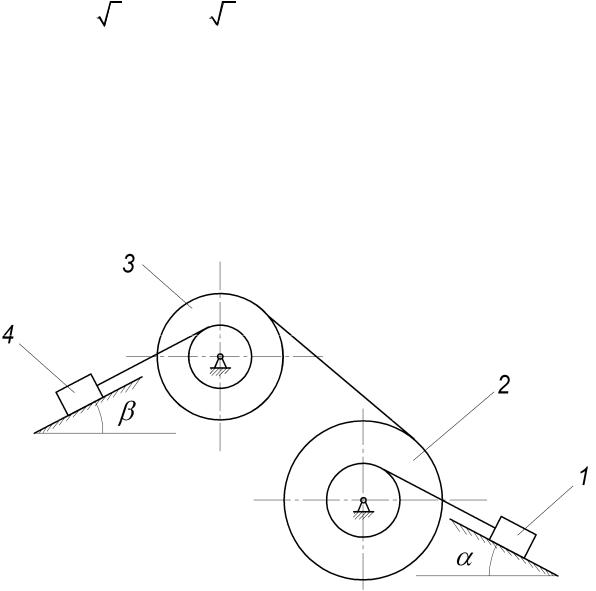
Механическая система, состоящая из двух грузов (1 и 4) и двух блоков (2 и 3),
связанных невесомыми нитями, начинает двигаться из состояния покоя под дейст-
вием сил тяжести (рисунок 2). Массы тел соответственно равны m1 22m,
m2 6m, m3 |
14m и m4 m. Блоки имеют ступенчатую форму, радиусы инер- |
|||||
ции блоков равны i2 |
и i3 , малые и большие радиусы ступеней - R2 , R3 , r2 и r3 , |
|||||
причем i2 /r2 |
|
|
, |
i3 /r3 |
|
, R2 /r2 2, R2 /r2 3. Грузы движутся по |
3 |
2 |
|||||
гладким наклонным плоскостям, расположенной под углами 300 и 600 к
горизонту. Сопротивлением подшипников вращению блоков пренебречь.
Для заданной механической системы определить зависимость между скоро-
стью груза 1 и его перемещением, а также ускорение груза 1. С помощью системы
MathCAD построить график зависимости скорости груза 1 от его перемещения.
Рисунок 2 – Механическая система
13

Дано: m1 22m, |
m2 6m, |
m3 14m, |
m4 m, |
i2 /r2 3 , |
i3 /r3 
 2 , R2 /r2 2, R3 /r3 3, 300 , 600 .
2 , R2 /r2 2, R3 /r3 3, 300 , 600 .
Найти: v1 f (S1), a1
Решение:
1 Изобразим механическую систему в произвольном положении, покажем скорости и угловые скорости тел, выразим скорости и угловые скорости тел через скорость груза 1 (рисунок 3).
Рисунок 3 – Механическая система в произвольном положении
Угловая скорость блока 2:
14
|
|
v1 |
|
|
|
r . |
(15) |
||||
2 |
|
||||
|
2 |
|
|
||
Угловая скорость блока 3:
|
v1 R2 |
|
2v1 |
|
|
||
r R |
R . |
(16) |
|||||
3 |
|
||||||
|
2 |
3 |
3 |
|
|
||
Скорость груза 4:
v r |
2v1 r3 |
|
2v1 |
|
(17) |
|
R |
|
|||||
4 |
3 3 |
3 . |
||||
|
|
3 |
|
|
|
|
2 Используя исходные данные, полученные кинематические зависимости и формулы (3), (4), (5) и (6), выразим кинетическую энергию механической системы через скорость груза 1:
T |
|
m v2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
1 |
1 |
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T2 |
I |
2 |
|
2 |
|
|
|
|
|
m i2 |
|
v 2 |
|
|
3m v2 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
2 |
|
|
|
|
|
|
2 |
|
2 |
|
|
|
1 |
|
|
|
|
|
|
2 |
1 |
|
|
|
, |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
2 |
|
|
|
|
|
|
2 |
|
|
r |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
T3 |
|
|
I |
3 |
2 |
|
|
m i2 |
|
2v |
|
|
|
2 |
|
|
|
2m i |
2 |
|
v2 |
|
4m v2 |
|||||||||||||||||||||||||||
|
|
3 |
|
|
|
|
|
|
3 3 |
|
|
|
1 |
|
|
|
|
|
|
|
3 3 |
|
1 |
|
|
3 |
|
1 |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
9 , |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
R3 |
|
|
|
|
|
|
3r |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
||
T |
|
|
m v2 |
|
|
m |
2v |
|
2 |
|
2m v2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
4 |
4 |
|
|
|
4 |
|
|
|
1 |
|
|
|
|
|
|
4 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
4 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
3 |
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
T T T T T v2 |
( |
m1 |
|
3m2 |
|
4m3 |
|
2m4 |
) |
, |
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
1 |
|
2 |
|
|
3 |
|
|
4 |
|
|
|
|
1 |
|
|
|
|
2 |
2 |
|
|
|
|
|
|
9 |
|
|
9 |
|
|
||||||||||||||||||
15
T v2 |
( |
22m |
|
3 6m |
|
4 14m |
|
2m |
) m v2 |
(11 9 |
56 |
|
2 |
) |
|
|
|
|
|
|
|||||||||
1 |
2 |
2 |
9 |
9 |
1 |
9 |
9 |
|
||||||
26,44m v12.
3 Тела входящие в систему являются абсолютно твердыми, нити - нерастяжи-
мыми, следовательно, данная механическая система является неизменяемой. Пока-
жем внешние силы, действующие на систему (рисунок 3). Активные силы: m1g ,
m2g , m3g , m4g . Пассивные силы: нормальные реакции опор N1 и N4 , реакции
неподвижных цилиндрических шарниров FR2 и FR3 . Используя формулы (9), (10) и (11), определим сумму работ внешних сил, выразив ее через перемещение груза 1.
A(m1g) m1g h1 m1g S1 Sin ,
A(m4g) m4g h4 m4g S4 Sin .
Найдем зависимость между перемещениями грузов:
v4 |
2v1 |
|
dS4 |
|
2dS1 |
dS4 |
2dS1 |
S4 |
2S1 |
|
|
|
|
|
|
. |
|||||
3 |
dt |
3dt |
3 |
3 |
||||||
Следовательно:
2
A(m4g) m4g 3 S1 Sin .
Работы остальных внешних сил равны нулю, так как силы m2g , m3g, FR2 и
FR3 приложены в неподвижных точках, а силы N1 и N4 перпендикулярны пере-
мещениям точек своего приложения. Сумма работ внешних сил:
16

n |
|
2 |
|
|
|
|
2 |
|
||
Ake m1g S1 Sin m4g |
S1 Sin gS1(m1 Sin m4 |
|
Sin ), |
|||||||
|
|
|
||||||||
k 1 |
3 |
|
|
|
3 |
|
||||
n |
2 |
|
|
2 |
|
|
|
|
||
Ake gS1(22m Sin m |
Sin ) gS1 m(22 0,5 |
0,866) |
||||||||
3 |
3 |
|||||||||
k 1 |
|
|
|
|
|
|
||||
10,42gS1 m.
4 Применив интегральную форму теоремы об изменении кинетической энер-
гии для неизменяемых систем (формула (13)), получим зависимость скорости груза
1 от его перемещения:
26,44m v2 10,42gS m, |
|
|
|
|
|||||||
|
1 |
|
|
1 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
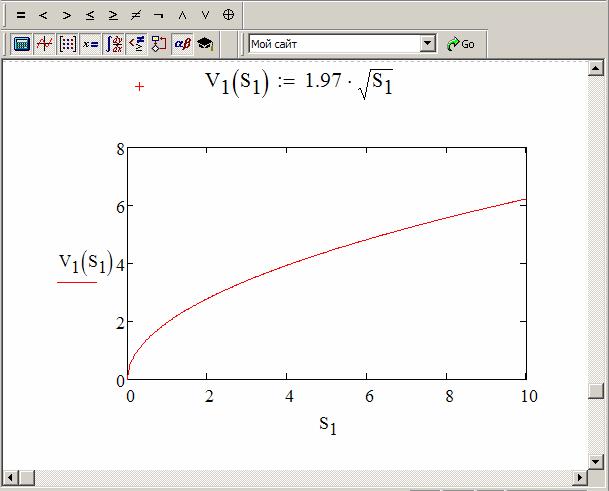
v |
|
10,42gS1 |
|
|
|
10,42 9,81 S1 |
|
1,97 |
|
|
|
|
|
|
|
S |
|||||||
26,44 |
26,44 |
||||||||||
1 |
|
|
|
|
1 . |
||||||
5 Для определения ускорения груза 1 воспользуемся дифференциальной фор-
мой теоремы об изменении кинетической энергии для неизменяемых систем (фор-
мула (14)).
dT |
d(26,44m v2) |
|
|
|
|||||
|
|
1 |
|
26,44m 2v a 52,88m v a |
, |
||||
|
|
|
|
||||||
dt |
|
dt |
1 |
1 |
1 1 |
||||
|
|
|
|
|
|
|
|||
n |
|
d(10,42gS1 |
m) |
|
|
|
|||
|
e |
|
|
|
|
||||
Nk |
|
|
|
|
10,42g v1 |
m, |
|
|
|
dt |
|
|
|
|
|||||
k 1 |
|
|
|
|
|
|
|
||
52,88m v1 a1 10,42g v1 m,
17
a |
10,13g |
|
10,42 9,81 |
1,93 |
м/с. |
52,88 |
|
||||
1 |
52,88 |
|
|||
6 С помощью системы MathCAD построим график зависимости между скоростью груза 1 и его перемещением (рисунок 4)
Рисунок 4 – График изменения скорости груза 1
18
4 Оформление отчета по лабораторной работе
Отчет по лабораторной работе должен оформляться в соответствии с требо-
ваниями СТО 02069024.101-2010 «Работы студенческие. Общие требования и пра-
вила оформления».
Отчет обязательно должен содержать:
-исходные данные задания,
-расчетную схему с указанием всех действующих на механическую систему внешних сил, а также направлений скоростей и угловых скоростей тел системы,
-кинематический анализ движения системы,
-выражения для определения кинетических энергий тел и системы в целом,
-выражения для определения внешних сил,
-выражение для определения суммы мощностей внешних сил,
-искомую зависимость между скоростью груза 1 и его перемещением, а также график изменения скорости, построенный в системе MathCAD,
-полученное значение ускорения груза 1.
19
Список использованных источников
1 Яблонский, А.А. Курс теоретической механики: учебник для вузов. / А.А. Яблон-
ский, В.М. Никифорова – 11-е изд., стер. – СПб: Лань, 2004. – 768 с.
2 Сборник заданий для курсовых работ по теоретической механике: учебное посо-
бие для технических вузов. / А.А. Яблонский [и др.]; под общ. ред. А.А. Яблонского. - 10-е изд., стер. - М.: Интеграл-пресс, 2003. - 384 с.
3Тарг, С.М. Краткий курс теоретической механики: учебник для вузов. / С.М. Тарг - 14-е изд., стер. – М.: Высшая школа, 2003 - 416с.
4Бать, М.И. Теоретическая механика в примерах и задачах: учеб. пособие для вту-
зов в 3-х томах. Т.2. Динамика. / М.И. Бать, Г.Ю. Джанелидзе, А.С. Кельзон - 8-е
изд., перераб. - М.: Наука, 1991. - 640с.
5 Дьяконов, В. Mathcad 2000: учебный курс. / В. Дьяконов – СПб: Питер, 2000. – 592
с.: ил.
20