

Устройство формирования управляющих сигналов (96
..pdfМосковский государственный технический университет имени Н. Э. Баумана
Е. Н. Баранов
Устройство формирования управляющих сигналов
Методические указания к выполнению курсовой работы по курсу «Теоретические основы электротехники»
Под редакцией С. С. Николаева
Москва Издательство МГТУ им. Н. Э. Баумана
2009
УДК 621.316.5 ББК 31.211
Б24
Рецензент Л. В. Ролдугин
Баранов Е. Н.
Б24 Устройство формирования управляющих сигналов : метод. указания / Е. Н. Баранов ; под ред. С. С. Николаева. — М.: Изд-во МГТУ им. Н. Э. Баумана, 2009. — 20 с.: ил.
Описаны электромагнитные процессы в линейных электрических цепях. Теория и методы расчета, освоенные ранее в курсах ТОЭ, «Электротехника», «Основы электротехники» применяются для решения задачи формирования сложного сигнала управления на фоне высокочастотной помехи.
Для студентов факультетов ИУ, РЛ, в том числе для групп с изучением курса в течение одного семестра.
УДК 621.316.5 ББК 31.211
Учебное издание
Баранов Евгений Николаевич
Устройство формирования управляющих сигналов
Редактор С. Ю. Шевченко Корректор Л. Н. Петрова
Компьютерная верстка М. А. Голуба
Подписано в печать 28.09.2009. Усл. печ. л. 1,4. Формат 60 84{16. Тираж 20 экз. Изд. № 42. Заказ
Издательство МГТУ им. Н. Э. Баумана. Типография МГТУ им. Н. Э. Баумана. 105005, Москва, 2-я Бауманская ул., 5.
c МГТУ им. Н. Э. Баумана, 2009

Курсовая работа иллюстрирует применение теории и методов расчета линейных электрических цепей, освоенных ранее в курсах ТОЭ и основ электротехники, для решения конкретной инженерной задачи. Поставленная задача состоит в формировании сложного сигнала управления, представляющего собой сочетание собственно входного сигнала (осложненного наличием высокочастотной помехи), полученного, например, с выхода некоторого датчика, и сигнала, сформированного по его производной. Дифференцирующее устройство (ДУ) рассчитывается непосредственно на основе пассивной r–c- или r–L–c-схемы, обеспечивающей достаточно высокую точность дифференцирования, приемлемый уровень выходного сигнала и обладающей свойством подавления высокочастотной помехи.
Целью курсовой работы является знакомство с методами исследования линейных частотно-избирательных цепей на примере расчета дифференцирующего устройства с заранее заданными свойствами.
Блок-схема рассматриваемого устройства представлена на рис. 1. Здесь u1ptq — некоторый входной сигнал (сигнал управления); ДУ — дифференцирующее устройство, формирующее сигнал по производной
°1. Описание устройства
u2ptq m du1ptq, dt
где m const; — сумматор; u3ptq — выходной сигнал, в котором соотношение составляющих u1ptq и u2ptq можно регулировать.
Входной сигнал u1ptq используется в качестве сигнала управления в некоторой системе автоматического регулирования. В целях достижения более высокого качества управления (например, для увеличения запаса устойчивости системы) кроме сигнала u1ptq должен использоваться также сигнал по производной u2ptq, где m — постоянный масштабный коэффициент (как правило, m ! 1).
3
U1(T) |
|
|
U1(T) |
|
U3(T) |
|||
|
|
|
||||||
|
|
|
U 2 |
(T ) = M |
DU1 (T ) |
|
∑ |
|
|
|
|
|
|||||
|
DT |
|||||||
|
|
|
||||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1. Блок-схема устройства формирования управляющих сигналов
Сигнал управления и сигнал по производной суммируются на входе соответствующего суммирующего устройства.
Входной сигнал имеет вид
u1 |
t |
|
U |
1qm sin |
t |
|
1qq Upkqm sinpkwt |
kqq |
|
p |
q |
p |
|
pw |
yp |
yp |
|
Upqqm sinpqwt ypqqq.
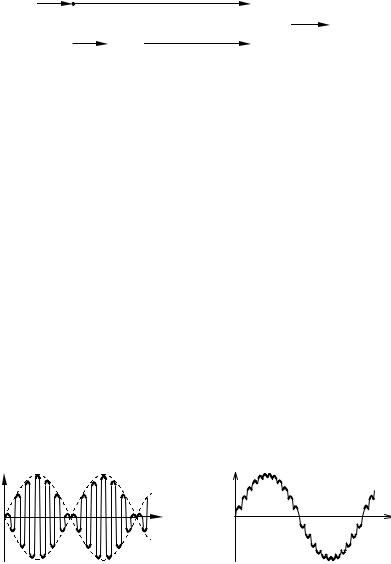
Две первые низкочастотные составляющие (1 k ! q) являются полезным сигналом управления, высокочастотная составляющая с частотой qw — помеха. Такие помехи характерны, например, для сигнала, полученного в результате демодуляции после передачи его по линии связи на несущей частоте. В этом случае полезный сигнал передается как огибающая сигнала на несущей частоте. На рис. 2 огибающая показана пунктиром. Она может быть выделена в результате демодуляции, а высокочастотная составляющая подавлена, однако, как правило, не до конца (рис. 3). При этом уровень помехи невелик и является для полезного сигнала допустимым.
U1(T)
T
Рис. 2. Сигнал управления на несущей частоте
U1(T) |
T |
Рис. 3. Сигнал управления после демодуляции
4

2.Техническое задание
1.Определить, какими частотными характеристиками должно обладать идеальное дифференцирующее устройство, способное дифференцировать сигнал с неограниченным спектром частот. Установить, от чего зависит уровень выходного сигнала такого дифференцирующего устройства.
2.Проверить возможность применения для дифференцирования сигнала простейшей дифференцирующей r–c-цепочки (рис. 4).
Так как суммирование входного сигна- |
|
|
C |
|
||||||
ла u1ptq и его производной m |
du1ptq |
про- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||
|
dt |
U1(T) |
|
|
R |
|
|
U2(T) |
||
|
|
|
||||||||
исходит на высокоомных входах сумматора, |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|||
можно считать, что r–c-цепочка на выхо- |
Рис. 4. |
Простейшая |
||||||||
де используется в режиме холостого хода. |
||||||||||
Не задавая конкретных значений r и c, вы- |
дифференцирующая |
|||||||||
|
|
|
|
|
|
|
|
|||
электрическая цепь
вести в общем виде амплитудно-частотную (АЧХ) и фазо-частотную (ФЧХ) характеристики рассматриваемой
r–c-цепочки, сравнить их с АЧХ и ФЧХ идеального дифференцирующего устройства и сделать вывод о принципиальной возможности проведения с ее помощью операции дифференцирования сигнала u1ptq в интересующем нас диапазоне частот от w до kw.
3. В случае положительного результата по п. 2 выбрать параметры r–c-цепочки, исходя из критериев качества работы устройства. Определить и построить АЧХ и ФЧХ устройства. С их помощью определить выходное напряжение u2ptq дифференцирующего устройства и построить график u1ptq. Проанализировать полученный результат с точки зрения следующих критериев:
•достаточен ли уровень полезного сигнала для его дальнейшего использования в системе автоматического регулирования;
•достаточна ли точность дифференцирования;
•достаточно ли низок уровень высокочастотной помехи по сравнению с уровнем полезного выходного сигнала.
Если с точки зрения хотя бы одного из этих критериев работу дифференцирующего звена нельзя признать удовлетворительной, следует наметить меры по устранению обнаруженного недостатка.
5
При этом нужно выяснить, не приведут ли намеченные меры к ухудшению качества по другим критериям. Затем необходимо оформить результаты анализа в виде предварительных выводов. Если достижение нужного качества при использовании заданной простейшей схемы дифференцирующего устройства затруднительно или невозможно, следует продумать и предложить улучшенный вариант (варианты) схемы, которая будет при этом оставаться пассивной. Улучшение должно состоять в том, что отмеченный недостаток в работе простейшей схемы будет устранен, но не за счет ухудшения других необходимых качеств.
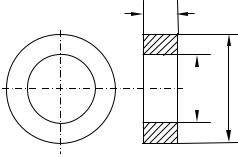
4. Вывести (в общем виде) выражения для АЧХ и ФЧХ новой, скорректированной схемы устройства. Выбрать те параметры схемы, которые в данном случае могут быть признаны неизменяемыми. Если в схеме используется индуктивность, которая не может быть реализована в виде стандартного элемента, выпускаемого промышленностью, определить конструктивные параметры катушки (число витков, сечение провода), обладающей приемлемым значением индуктивности, используя для этой цели кольцевой магнитопровод, выполненный из феррита с относительной магнитной проницаемостью mr и размерами, указанными на рис. 5. Активное сопротивление обмотки должно быть рассчитано и включено в схему замещения дифференцирующего устройства.
H |
|
1 |
2 |
D |
D |
Рис. 5. Тороидальный ферромагнитный сердечник
6
5.Определить алгоритм выбора изменяемого параметра (параметров) устройства, удовлетворяющего выбранным критериям качества (приемлемый уровень выходного сигнала при достаточной точности дифференцирования и низком уровне помех). Определить значение изменяемого параметра (параметров) схемы.
6.Построить графики АЧХ и ФЧХ дифференцирующего устройства с учетом выбранных значений ее параметров, определить с их
помощью выходной сигнал u2ptq m du1ptq. Проанализировать dt
качество дифференцирования, построив и сравнив графики идеаль-
ной производной u2ptq m du1ptq (где u1ptq — полезный входной dt
сигнал без учета помехи) и выходного сигнала u2ptq, оценив степень их совпадения. Коэффициент m следует выбрать так, чтобы оба сигнала были соизмеримы по уровню. Оформить окончательные выводы.
В табл. 1 приведены входные воздействия u1ptq для различных вариантов задания, в табл. 2 — критерии качества работы устройства и исходные данные для расчета катушки индуктивности.
|
|
|
|
|
|
Таблица 1 |
|
|
|
|
|
||
Вариант |
|
|
|
Входной сигнал u1ptq, В |
||
|
|
|
||||
1 |
u1 t |
2 sin 500t sin 1500t 0,01 sin 100 000t |
||||
|
|
|
|
|
||
2 |
u1 t |
sin 600t |
sin 1200t |
0,005 sin 150 000t |
||
|
|
|
|
|
||
3 |
u1 t |
sin 500t |
sinp1000t |
p{2q 0,01 sin 100 000t |
||
|
|
|
||||
4 |
u1 t |
2 sin 500t sinp1500t p{2q 0,01 sin 120 000t |
||||
|
|
|
||||
5 |
u1 t |
sin 500t sin 1500t 0,04 sin 80 000t |
||||
|
|
|
|
|
||
6 |
u1 |
t |
1,6 sin 700t |
sin 1400t 0,01 sin 200 000t |
||
|
|
|
|
|
||
7 |
u1 |
t |
1,5 sin 600t |
0,8 sinp1800t p{2q 0,02 sin 120 000t |
||
|
|
|
|
|||
8 |
u1 |
t |
1,2 sin 400t 0,6 sin 1200t 0,01 sin 180 000t |
|||
|
|
|
|
|||
9 |
u1 |
t |
sin 400t 0,5 sin 800t 0,025 sin 120 000t |
|||
|
|
|||||
10 |
u1ptq 2 sin 500t 1,5 sinp1500t p{2q 0,015 sin 150 000t |
|||||
|
|
|
|
|
|
|
7
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2 |
|
|
|
|
|
|
|
|
|
|
|
|
p a |
|
|
Вари- |
d1, |
|
d2, |
|
h, |
mR |
dпр, |
|
KpKq{Kp1q, |
|
|
pKq, |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
ант |
мм |
|
мм |
|
мм |
|
мм |
|
не более |
радиан, не менее |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
10 |
|
16 |
|
4 |
3500 |
0,1 |
|
3,15 |
0,035 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
2 |
10 |
|
18 |
|
6 |
2500 |
0,1 |
|
2,2 |
0,044 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
3 |
12 |
|
20 |
|
5 |
2200 |
0,16 |
|
2,15 |
0,052 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
4 |
12 |
|
18 |
|
5 |
1500 |
0,16 |
|
3,2 |
0,061 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
5 |
14 |
|
20 |
|
6 |
1200 |
0,2 |
|
3,25 |
0,030 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
6 |
14 |
|
22 |
|
4 |
1400 |
0,2 |
|
2,15 |
0,042 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
7 |
15 |
|
21 |
|
3 |
2000 |
0,15 |
|
3,3 |
0,050 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
8 |
15 |
|
23 |
|
4 |
3200 |
0,15 |
|
3,2 |
0,058 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
9 |
11 |
|
17 |
|
3 |
3800 |
0,12 |
|
2,18 |
0,038 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
10 |
11 |
|
19 |
|
4 |
3000 |
0,12 |
|
3,15 |
0,046 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
Примечание. |
Размеры |
D1, |
D2 и |
H даны |
для ферромагнитного сердечника |
||||||||
(см. рис. 5); mR — относительная магнитная проницаемость сердечника; Dпр — диаметр провода обмотки.
3. Рекомендации к выполнению курсовой работы
3.1. Особенности вычисления частотных характеристик электрической цепи
Исследуемое ДУ можно рассматривать как четырехполюсник, работающий в режиме холостого хода, так как его выходные клеммы соединены с одним из входов сумматора (см. рис. 1), т. е. операционного усилителя с очень высоким входным сопротивлением.
Пусть на вход четырехполюсника подано синусоидальное на-пряжение u1ptq U1m sinpwt y1q, а выходное напряжение u2ptq U2m sinpwt y2q. Отношение комплексных амплитуд выходного и входного напряжений называется комплексным коэффициен-
8

том передачи по напряжению. Отношение комплексных амплитуд может быть заменено отношением действующих значений напряжений:
Kpjwq |
U2m |
|
j 2 |
|
U2m ejpy2 y1q Kpwqejapwq. (1) |
|
|
U2m e |
|
||||
|
9 |
|
|
|
|
|
|
U1 |
|
U1m ejy1 |
|
U1m |
|
|
m |
|
|
|
|
|
Таким образом, амплитудно-частотная характеристика четырехполюсника Kpwq U2m{U1m представляет собой отношение модулей амплитуд (или действующих значений) выходного и входного напряжений; фазо-частотная характеристика a y2 y1 равна разности начальных фаз напряжений. Зная частоту w входного напряжения u1ptq и определив ординаты АЧХ и ФЧХ на этой частоте, нетрудно найти амплитуду и начальную фазу выходного напряже-
|
y |
|
U1mK |
pwq |
, |
|
(2) |
|
U2m |
|
|
|
|||
|
2 y1 apwq. |
|
|
(3) |
|||
Тогда выходное напряжение |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
u2ptq U1mKpwq sin wt y1 apwq . |
(4) |
|||||
Следует |
отметить, что отношение |
модулей амплитуд |
Kpwq |
||||
U2m{U1m всегда положительно,b в то время как apwq y2 y1 может иметь любой знак.
Комплексный коэффициент передачи Kpjwq может быть пред-
ставлен как в показательной, так и в алгебраической форме: |
|
Kpjwq K ejapwq K1pwq jK2pwq. |
(5) |
Здесь составляющие K1pwq и K2pwq называются соответственно действительной и мнимой частотными характеристиками. Очевид-
Kpwapqwq K12pwq K22pwq, |
(6) |
||
arctg |
K2 |
. |
(7) |
|
|||
|
K1pwq |
|
|
Чтобы найти АЧХ и ФЧХ для конкретной электрической цепи, необходимо вычислить действующее значение выходного напряжения U9 2m (методом комплексных амплитуд), считая U9 1m известным,
9

а затем найти отношение 2m 9 1m. Комплексный коэф-
Kpjwq U9 {U
фициент передачи определяют, как правило, в алгебраической форме: Kpjwq K1pwq jK2pwq. Затем по формулам (6), (7) можно определить АЧХ Kpwq и ФЧХ apwq. При вычислениях реактивные сопротивления представляют как функции частоты w, т. е. без подстановки какого-либо числового значения w. В таком случае АЧХ и ФЧХ также будут действительными функциями частоты.
Применяя принцип суперпозиции, аналогичным образом с помощью АЧХ и ФЧХ можно определить реакцию цепи на более сложное входное воздействие, представленное, например, рядом Фурье.
3.2. Последовательность выполнения курсовой работы
На первом этапе работы следует определить, какими частотными свойствами должно обладать идеальное ДУ, способное осуществлять операцию дифференцирования в любом диапазоне частот спектра входного сигнала, причем с абсолютной точностью, и сформулировать требование к его АЧХ и ФЧХ. При этом необходимо иметь в виду, что технически идеальной считается операция, когда входное u1ptq и выходное u2ptq напряжения дифференцирующего звена связаны соотношением
u2ptq m |
du1ptq |
, |
(8) |
dt |
где m const — некоторый произвольный коэффициент пропорциональности (обычно m ! 1).
Достаточно, чтобы АЧХ и ФЧХ реального ДУ были близки к идеальным лишь в диапазоне частот спектра заданного входного сигнала u1ptq. Однако при наличии высокочастотной помехи имеет значение и вид АЧХ в области высоких частот, где проектируемое устройство в идеале должно обладать возможностями подавления помехи.
Согласно техническому заданию, первоначально следует проанализировать возможность применения известного простейшего ДУ в виде пассивной r–c-цепочки (см. рис. 4), но с учетом выполнения одновременно трех указанных в задании критериев качества
10