

Нижегородский Государственный Технический Университет
Имени Р.Е.Алексеева
Кафедра “Электрооборудование, электропривод и автоматика”
Отчет по лабораторной работе №1
“ Исследование ошибки САУ в статическом и динамическом режимах”
Выполнил:
Федоров К.
Проверил:
Мельников В.Л.
Нижний Новгород
2022 г.
Цель: теоретическое и экспериментальное определение и исследование ошибки САУ в статическом и динамическом режимах.
Программа работы:
1.
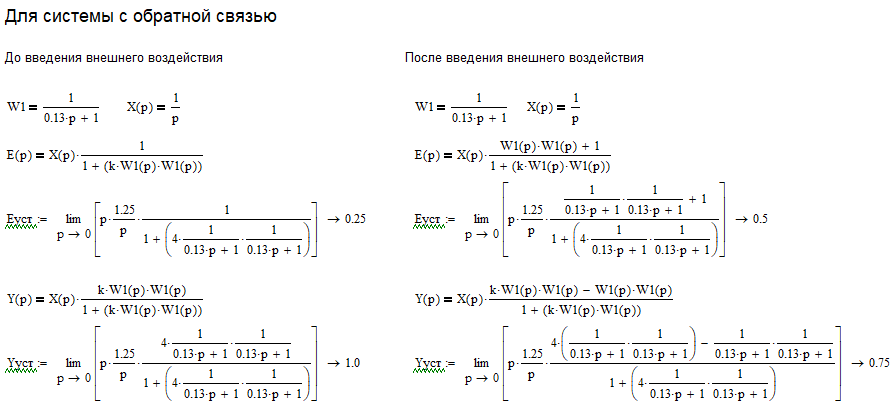
Экспериментально определить ошибку по
управлению в замкнутой статической
системе при

2. Экспериментально определить ошибку по возмущению в замкнутой статической системе при
3. Оценить изменение выходного сигнала при единичном скачке возмущения в разомкнутой системе, сравнить с соответствующим показателем замкнутой системы
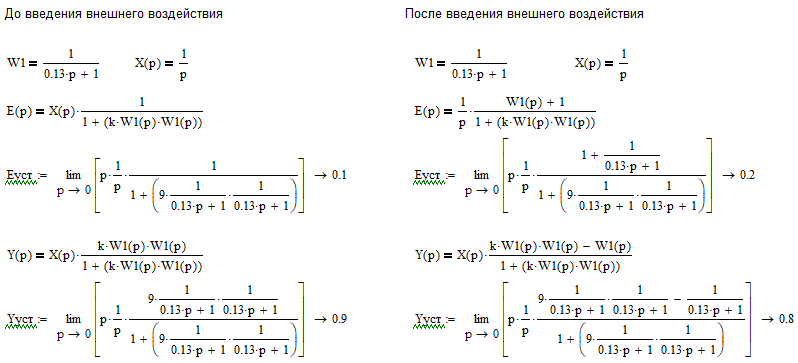
4. Экспериментально исследовать статическую ошибку в астатической системе:
а-астатизмом обладает регулятор
б - астатизмом обладает объект
5.
Определить ошибку по управлению в
астатической системе при

Постоянные времени инерционных звеньев
№ студ. По списку |
5 |
Т1, T2 с |
0.13 |
При выполнении отчёта необходимо:
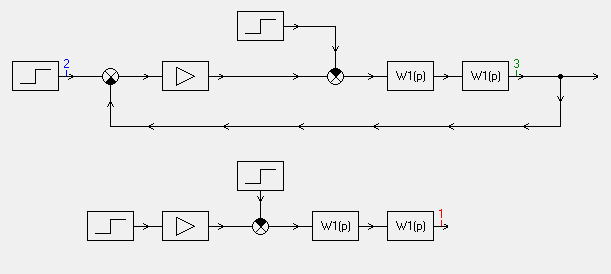
Составить структурную схему для статики в соответствии с моделью САУ
Получить выражения для выходной координаты и ошибки.
Рассчитать величину ошибки для п. 1-5 программы.
Построить регулировочную –
 и внешнюю –
и внешнюю –
 характеристики системы.
характеристики системы.Построить в одних осях графики для разомкнутой и замкнутой системы
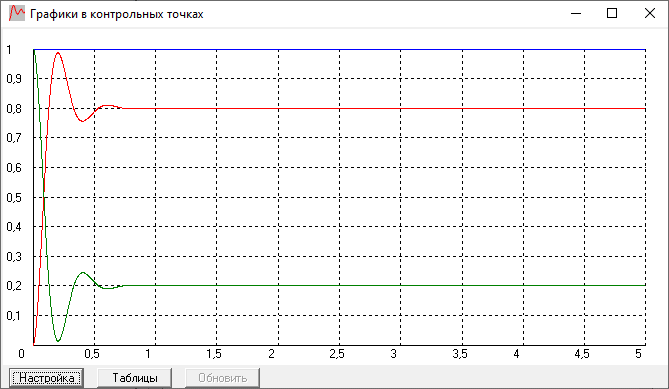
Привести модели САУ и графики переходных процессов для п. 1-5 программы и таблицу для п.5
1.
Модель, выполненная в SamSim:
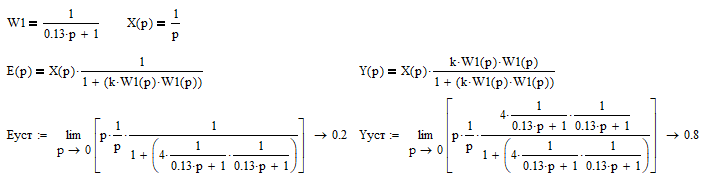
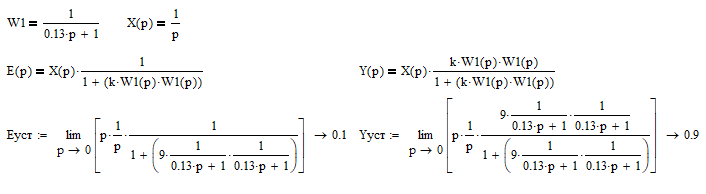
Экспериментальные расчеты:
При k=4
При k=9
2.
Модель, выполненная в SamSim:
Экспериментальные расчеты:
При k=4

При k=9
![]() не
корректное выражение (здесь и далее).
не
корректное выражение (здесь и далее).
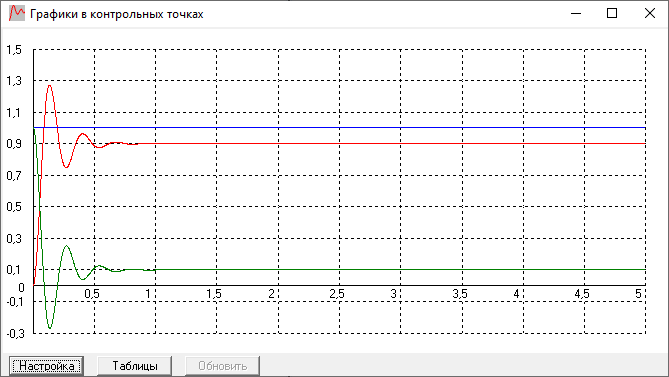
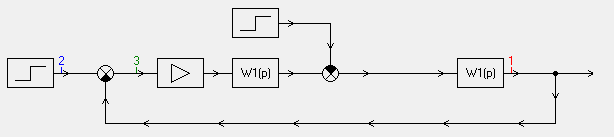
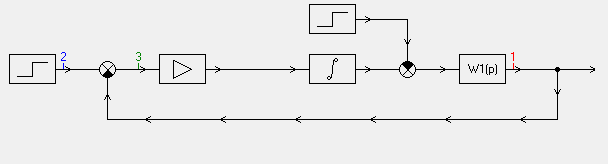
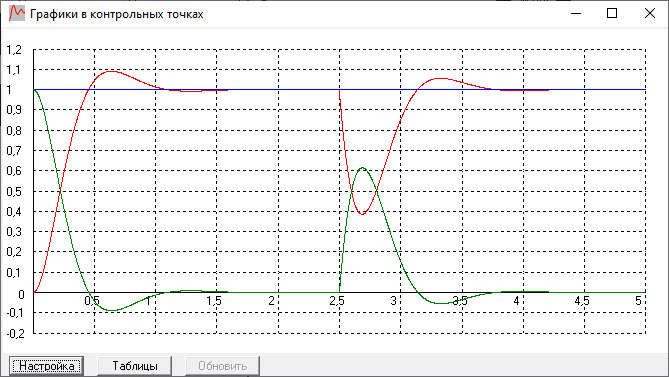
3.
Модель, выполненная в SamSim:
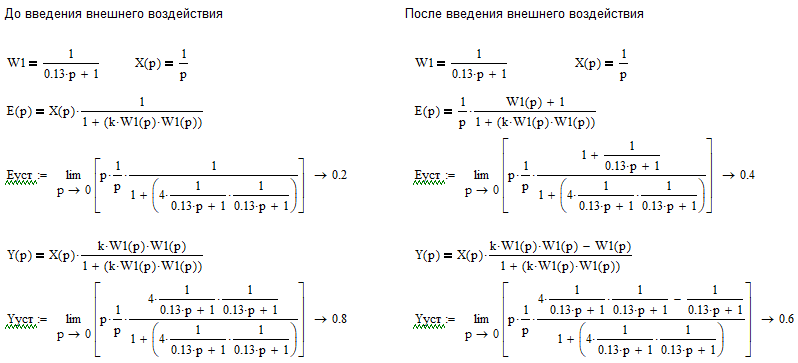
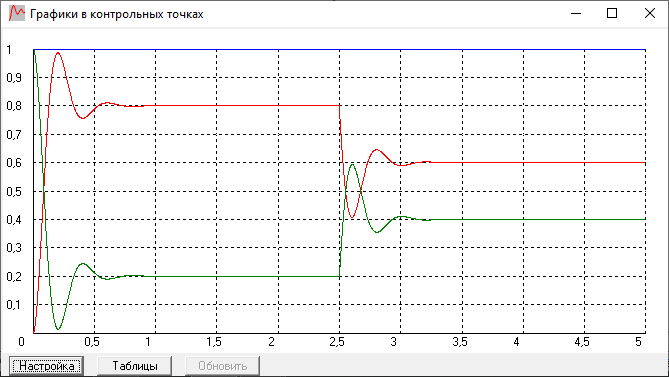
Экспериментальные расчеты:
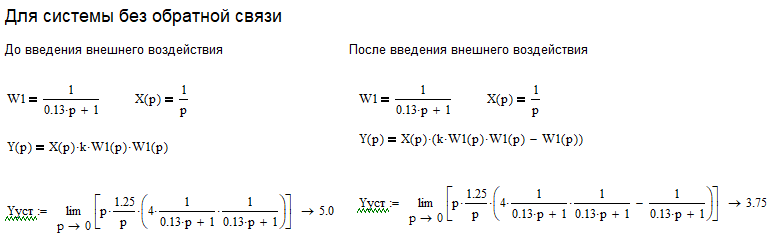
Т.о. отклонение выходной координаты в замкн сист в 1+к раз меньше
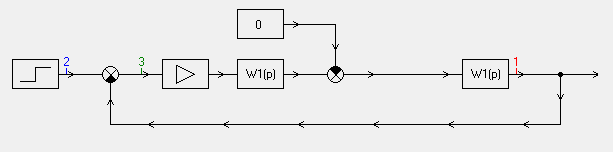
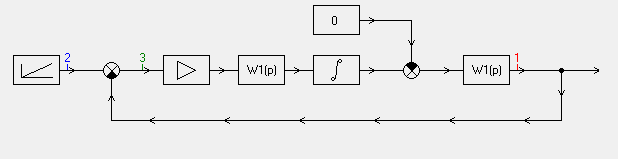
4.1 астатизмом обладает регулятор
Модель, выполненная в SamSim:
Экспериментальные расчеты:
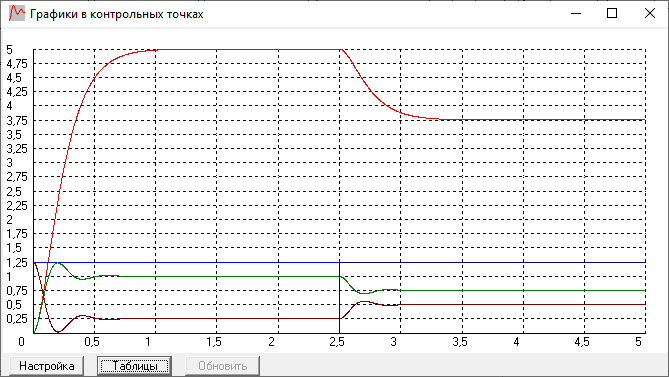
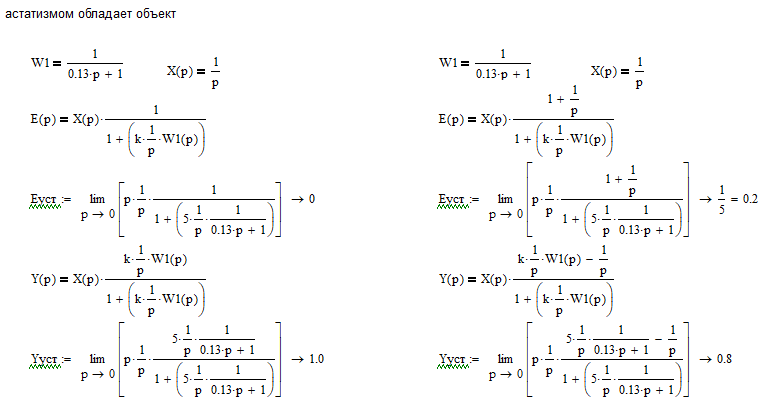
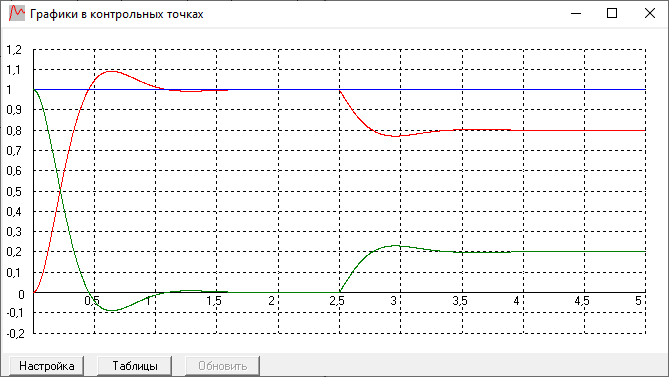
4.2 астатизмом обладает объект
Модель, выполненная в SamSim:
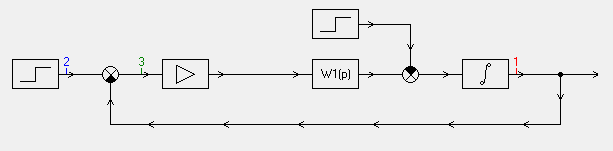
Экспериментальные расчеты:
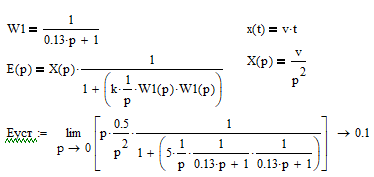
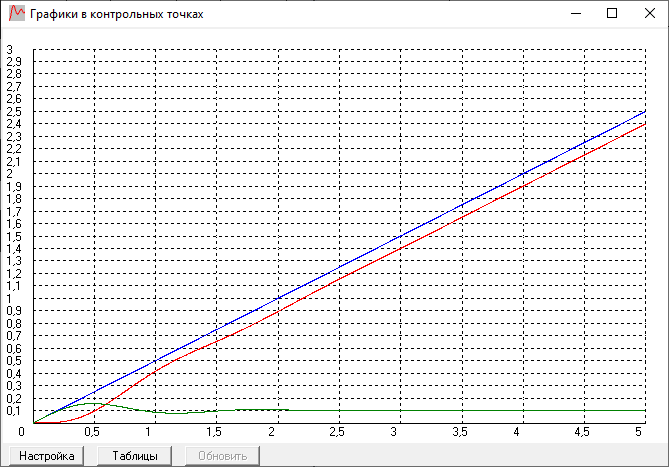
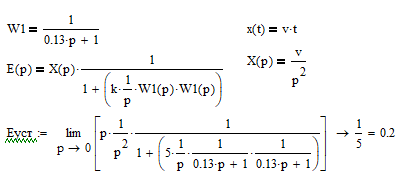
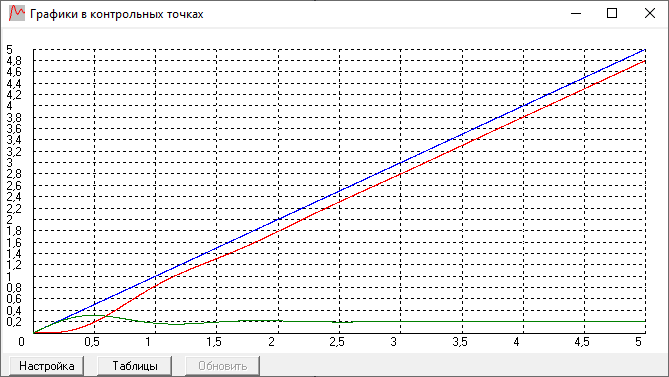
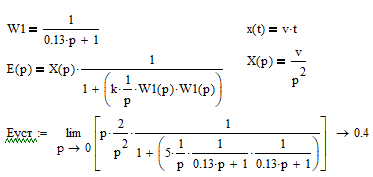
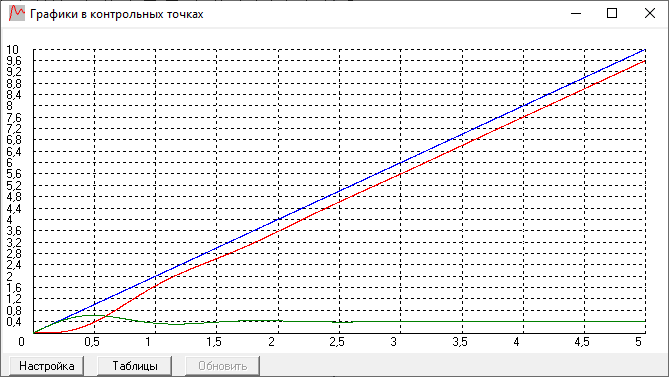
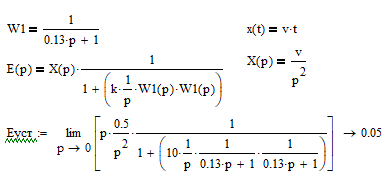
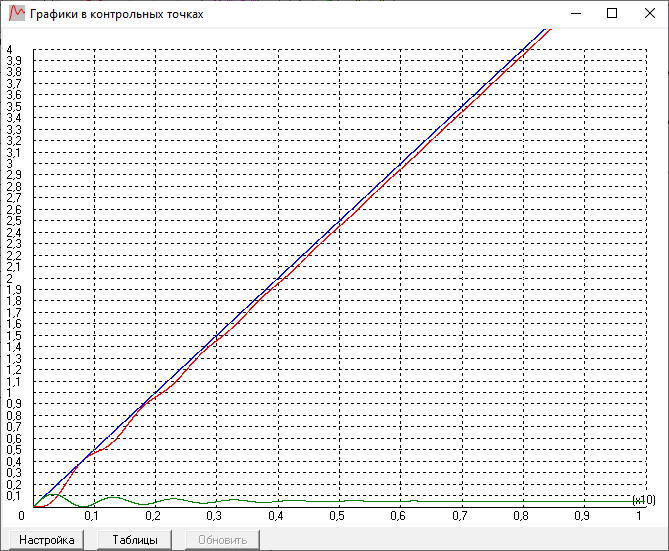
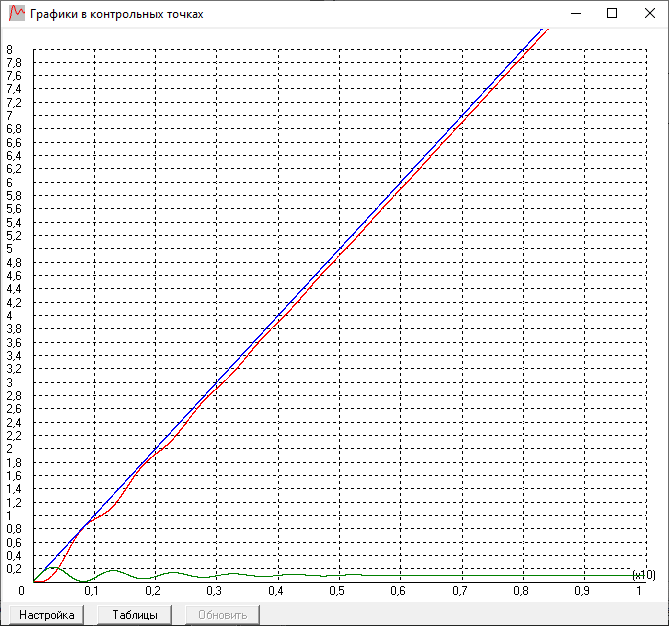
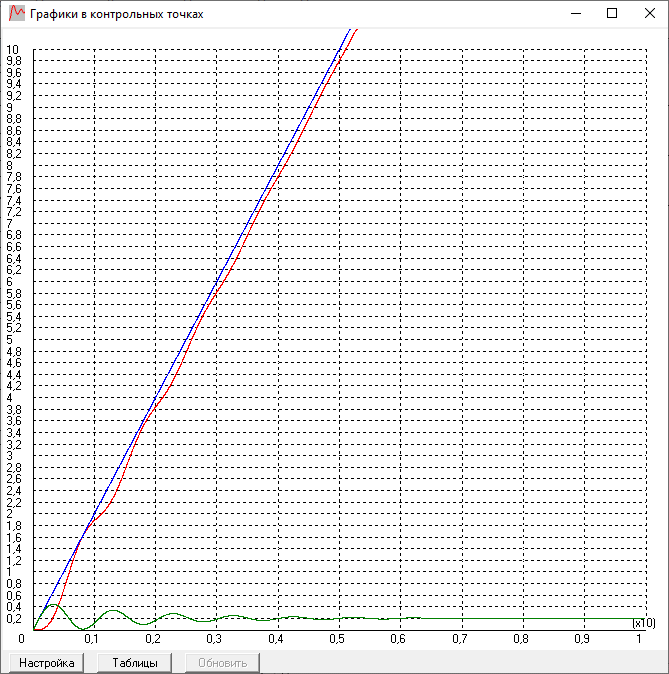
5.
Модель, выполненная в SamSim:
k |
5 |
5 |
5 |
10 |
10 |
10 |
V
|
0.5 |
1 |
2 |
0.5 |
1 |
2 |
ε |
0.1 |
0.2 |
0.4 |
0.05 |
0.1 |
0.2 |

Экспериментальные расчеты:
k=5; v=0.5
k=0.5 ; v=1
k=5; v=2
K=10; v=0.5
K=10; v=1
K=10; v=2
Вывод:
1. Обнаружив ошибку экспериментальным и аналитическим способами в статической системе, вычислили зависимость ошибки от коэффициента по закону:

2. Обнаружив ошибку по возмущению экспериментальным и аналитическим способами в статической системе, вычислили зависимость ошибки от коэффициента по закону:
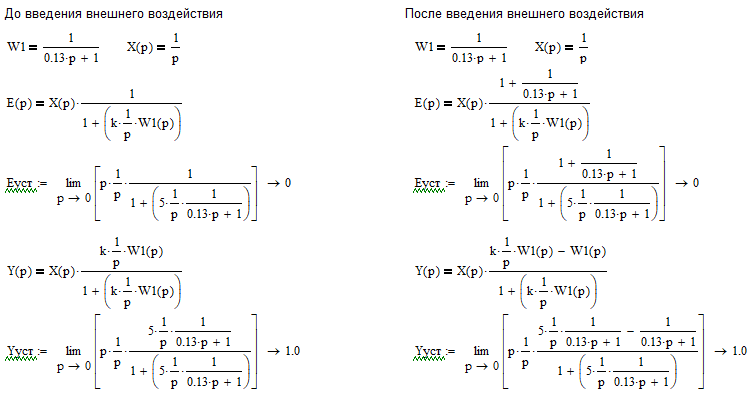
3. Рассмотрев статическую систему в двух состояниях, замкнутом и разомкнутом, рассчитав ошибку и уровень выходного сигнала и сравнив результаты между собой, можно сделать вывод:
Внешнее воздействие в замкнутой статической системе слабее влияет на уровень выходного сигнала чем в разомкнутой.
|
Замкнутая система |
Разомкнутая |
До введения внешнего воздействия |
|
|
После введения внешнего воздействия |
|
|






4.
Рассмотрев две статические системы, а)
астатизмом обладает регулятор; б)
астатизмом обладает объект, экспериментальным
и аналитическим способами установлено,
что: при расположении интегрирующего
звена до сумматора (а) Eуст=0,
а при расположении интегрирующего звена
после сумматора (б)

5. Обнаружив ошибку экспериментальным и аналитическим способами в астатической системе, вычислили зависимость ошибки от скорости и коэффициента по закону:
