

Задания для тестирования студентов по дисциплине “Электрический привод”
1 Механика электропривода
1.1В механическую часть привода входит ротор асинхронного электродвигателя.
1.2В механическую часть привода входит якорь электродвигателя постоянного
тока.
1.5Механической характеристикой исполнительного механизма называется зависимость М с f ( с )
1.6Уравнение с f (М с ) называется механической характеристикой исполнительного механизма.
1.7Уравнение vс f (Fс ) называется ______________ характеристикой исполнительного механизма.
1.8 |
Уравнение |
эл f (М эл ) |
называется |
механической |
характеристикой |
электродвигателя. |
|
|
|
|
|
1.9 |
Уравнение |
vэл f (Fэл ) |
называется |
____________характеристикой |
|
электродвигателя. |
|
|
|
|
|
1.10Механической характеристикой электродвигателя называется зависимость момента сопротивления от скорости.
1.11Сила сопротивления движению, созданная силами сухого трения, с увеличением скорости движения увеличивается.
1.12Сила сопротивления движению, созданная силами вязкого трения, с увеличением скорости движения возрастает.
1.13Сила сопротивления движению, созданная потенциальными силами, с увеличением скорости движения не изменится.
1.14Момент сопротивления движению, созданный силами сухого трения, с изменением направления движения поменяет свой знак.
1.15Момент сопротивления движению, созданный силами вязкого трения, с изменением направления движения поменяет свой знак.
1.16Момент сопротивления движению, созданный потенциальными силами, с изменением направления движения будет либо способствовать либо препятствовать движению.
1.17Момент сопротивления движению, созданный центробежными силами, с возрастанием скорости движения возрастёт.

1.18Момент сопротивления движению, созданный потенциальными силами, с возрастанием скорости движения не изменется.
1.19Момент сопротивления движению, созданный силами сухого трения, с возрастанием скорости движения возрастает.
1.20Момент сопротивления движению, созданный силами вязкого трения, с возрастанием скорости движения возрастает.
1.21Момент, созданный силами трения, называется реактивным.
1.22Момент, созданный потенциальными силами, называется активным.
1.23Реактивный статический момент меняет знак при изменении направления
движения.
1.24Активный статический момент не изменяют знак при изменении направления
движения.
1.25Знак момента в уравнении движения электропривода определяется направление потока мощности, вырабатываемой двигателем.
1.26Момент, действие которого совпадает с направлением движения, считается способствующим движению.
1.27Момент, действие которого противоположно направлению движения, считается тормозящим.
1.28Момент, определяющий ускорение электропривода, называется динамическим.
1.29Динамический момент определяет характер движения электропривода.
1.30Уравнение, описывающее поступательное движение механической части
|
F |
|
F |
m |
|
dv |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
привода, имеет вид |
эл |
|
ст |
|
|
dt |
|
плюс минус перед каждым членом |
|
|
|||
1.31 Уравнение, |
описывающее вращательное движение механической части |
||||||||||||
|
М |
|
М ст J |
|
d |
|
|||||||
привода, имеет вид |
эл |
|
dt |
плюс минус перед каждым членом |
|
||||||||
|
|
|
|
|
|
|
|
|
|||||
1.32 Уравнение Fэл Fст m dvdt описывает поступательное ускоренное движение
электропривода.
.
1.33 Уравнение М эл М ст J d описывает вращательное ускоренное движение dt
электропривода.

1.34 |
Уравнение |
М эл М ст |
J |
|
d |
описывает |
|
вращательное |
замедленное |
|||
|
dt |
|
||||||||||
движение электропривода. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dv |
|
|
|
|||
1.35 |
Уравнение |
F |
F |
m |
|
описывает |
поступательное |
замедленное |
||||
|
|
|
|
|||||||||
|
|
эл |
ст |
|
|
|
dt |
|
|
|
|
|
движение электропривода
1.36Приведённое значение реактивного статического момента определяется по
формуле
1.37Приведённое значение статического момента, созданного весом поднимаемого груза, определяется по формуле
1.38 Приведённое значение статического момента, созданного весом опускаемого груза, определяется по формуле
1.39 Формула |
М стпр |
|
М |
с |
определяет приведенное значение статического |
|||
iр |
|
р |
||||||
|
|
|
|
|||||
момента при подъёме груза.
1.40 Формула |
М стпр |
|
М |
с |
р |
определяет приведённое значение статического |
iр |
|
|||||
|
|
|
|
|
||
момента при спуске груза.
1.41 Формула |
М ст |
|
|
М |
с |
|
определяет |
реактивное |
значение статического момента |
||||
iр |
|
|
|
||||||||||
|
|
|
р |
|
|
|
|
||||||
|
|
|
|
М |
с |
р |
|
|
|
|
|||
1.42 Формула |
М ст |
|
|
определяет |
Активное |
значение статического момента |
|||||||
|
|
i |
р |
||||||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.43Силы, способствующие возникновению колебаний в системе, называются упругими(консервативными).
1.44Силы, способствующие затуханию колебаний в системе, называются сопротивления(трения)(диссипативными).
1.45Диссипативные силы, действующие в механической системе, способствуют Преобразованию её полной механической энергии в другие виды энергии,не
механические.
1.46 Консервативные силы, действующие в механической системе, способствуют Возникновению колебаний в системе.
1.47 Отношение поступательной скорости исполнительного механизма к угловой скорости вала электродвигателя определяет радиусом приведения.
1.48 В одномассовой механической системе разность между моментом электродвигателя и статическим моментом определяет динамический момент.
1.49 Определение приведенного момента инерции механической системы к валу электродвигателя выполняется на основании закона сохранения механической энергии.
1.50 Определение приведенного момента инерции механической системы к валу электродвигателя выполняется на основании закона сохранения механической энергии.
1.51 Определение величины приведенного к валу электродвигателя статического момента механизма выполняется на основе закона сохранения мощности.
1.52 Механическая система, состоящая из абсолютно жестких звеньев, может быть представлена приведённой механической системой.
1.53 Механические характеристики оцениваются жесткостью, определяемой как
dМ d
dМ
1.54 Выражение d определяет жёсткость механической характеристики
1.55 Механическая система, содержащая упругий элемент сводится к приведёной(реальной?) расчетной схеме.
1.56 Электродвигатель с механической характеристикой ω =200 – 0,714М работает на механизм с характеристикой ω =1000/М. определить установившуюся скорость
движения. 196,4 или 3,6 радиан/с
1.61 Механическая система устойчива, если выполняется следующее соотношение между жёсткостью механической характеристики двигателя дв и жесткостью
механической характеристики исполнительного механизма ст
1.62 Если жёсткость механической характеристики двигателя дв больше
жесткости механической характеристики исполнительного механизма ст , то механическая система неустойчива.
1.63 Если жёсткость механической характеристики двигателя дв меньше
жесткости механической характеристики исполнительного механизма ст , то механическая система устойчива.
1.64 Если жёсткость механической характеристики двигателя дв равна жесткости механической характеристики исполнительного механизма ст , то механическая
система имеет установившийся режим работы.
1.65 На рисунке показаны участки механических характеристик электродвигателя - 1 и исполнительного механизма – 2. При нахождении в точке пересечения характеристик механическая система устойчива.
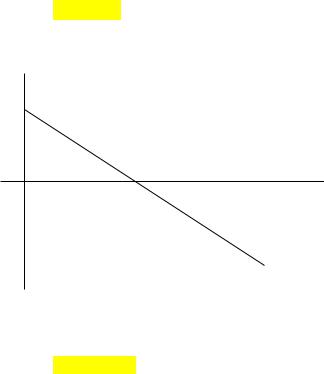
1.66 На рисунке показаны участки механических характеристик электродвигателя - 1 и исполнительного механизма – 2. При нахождении в точке пересечения характеристик механическая система неустойчива.

1.67 На рисунке показаны участки механических характеристик электродвигателя - 1 и исполнительного механизма – 2. При нахождении в точке пересечения характеристик механическая система неустойчива.
ω
2 1
М
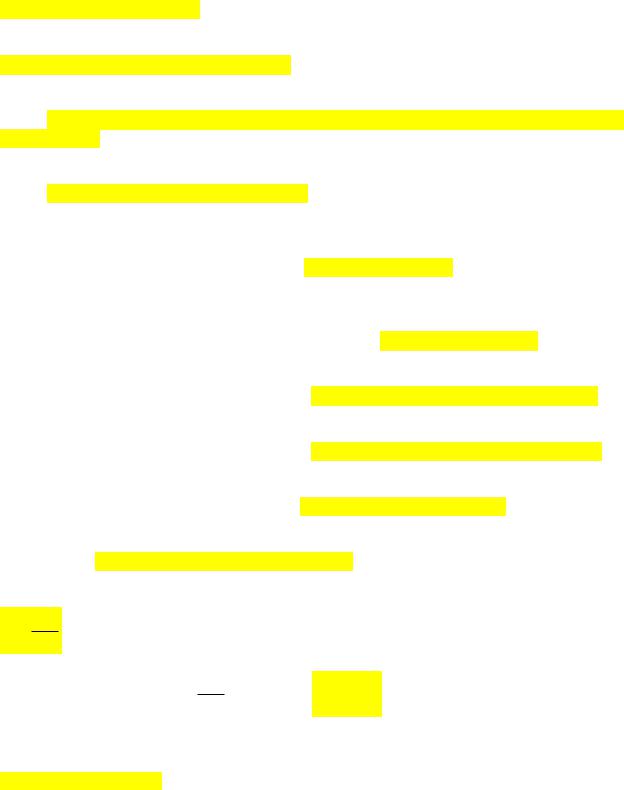
1.68 На рисунке показаны участки механических характеристик электродвигателя - 1 и исполнительного механизма – 2. При нахождении в точке пересечения характеристик механическая система неустойчива.
ω
1
2
М
1.69 На рисунке показаны участки механических характеристик электродвигателя - 1 и исполнительного механизма – 2. При нахождении в точке пересечения характеристик механическая система устойчива.
ω
1 2
М
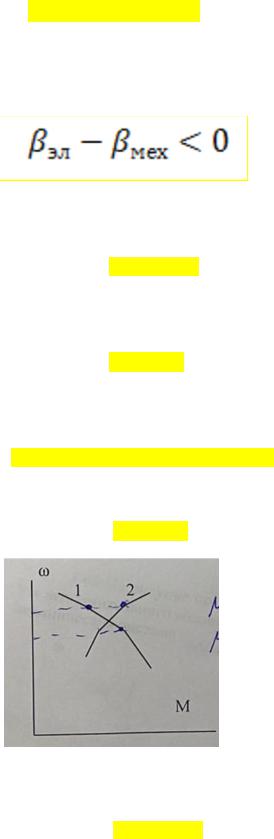
1.70 На рисунке показаны участки механических характеристик электродвигателя - 1 и исполнительного механизма – 2. При нахождении в точке пересечения характеристик механическая система неустойчива.
ω
1
2 
М
1.71 На рисунке показаны участки механических характеристик электродвигателя - 1 и исполнительного механизма – 2. При нахождении в точке пересечения характеристик механическая система неустойчива.
ω
1
2
М
1.72 На рисунке показаны участки механических характеристик электродвигателя - 1 и исполнительного механизма – 2. При нахождении в точке пересечения характеристик механическая система неустойчива.
ω
1
2
М
1.73Если динамический момент постоянен, то изменение скорости механической системы электропривода не происходит.
1.74Линейное изменение скорости механической системы электропривода возможно, если _______________.
1.75Линейное изменение скорости механической системы электропривода возможно, если
1.76Неустановившееся движение электропривода имеет место, когда моменты двигателя и нагрузки отличаются друг от друга,т.е. М≠Мс
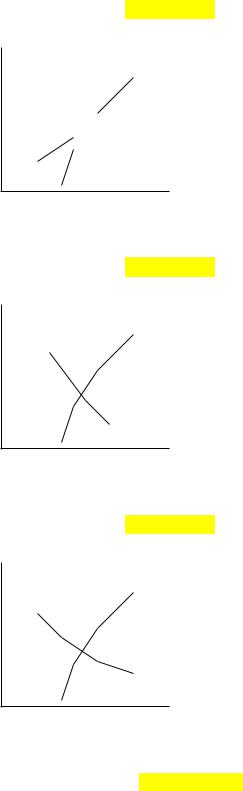
1.77Условиям, изображенным на рисунке соответствует функция эл f (t) под номером ___3____
ω,М |
|
2 |
3 |
1 |
|
4 |
|
|
Мэл |
|
Мс |
|
t |
1.78 Условиям, изображенным на рисунке соответствует функция эл f (t)
|
под номером __2_____ |
|
|
|||
|
ω,M |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
Мс |
|
|
|
|
|
|
Мэ |
|
|
|
|
|
|
t |
|
|
1.79 |
Уравнение |
М эл |
М ст J |
d |
||
dt |
||||||
|
|
|
|
|
||
движение электропривода. ген.реж |
|
|
||||
1.80 |
Уравнение |
F |
F |
m |
dv |
|
|
|
эл |
ст |
|
dt |
|
движение электропривода. ген.реж |
|
|
||||
описывает ускоренное вращательное
описывает ускоренное поступательное
1.81 |
Уравнение |
М эл М ст |
J |
|
d |
|
описывает |
|
|
|
ускоренное |
вращательное |
||||||||||
|
|
dt |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
движение электропривода. |
Двиг.реж |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1.82 |
Уравнение |
|
F |
|
F |
|
m |
|
|
dv |
описывает |
|
ускоренное поступательное |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
эл |
ст |
|
|
dt |
|
|
|
|
|
|
|||||||||
движение электропривода. |
Двиг.реж |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
М эл М ст |
J |
|
|
d |
|
|
|
|
|
|||||||||||
1.83 |
Уравнение |
|
|
описывает |
|
|
вращательное |
замедленное |
||||||||||||||
|
|
dt |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
движение электропривода. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1.84 |
Уравнение |
|
F |
F |
m |
|
|
dv |
описывает |
поступательное |
замедленное |
|||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
эл |
|
ст |
|
|
|
|
dt |
|
|
|
|
|
|
||||||
движение электропривода.
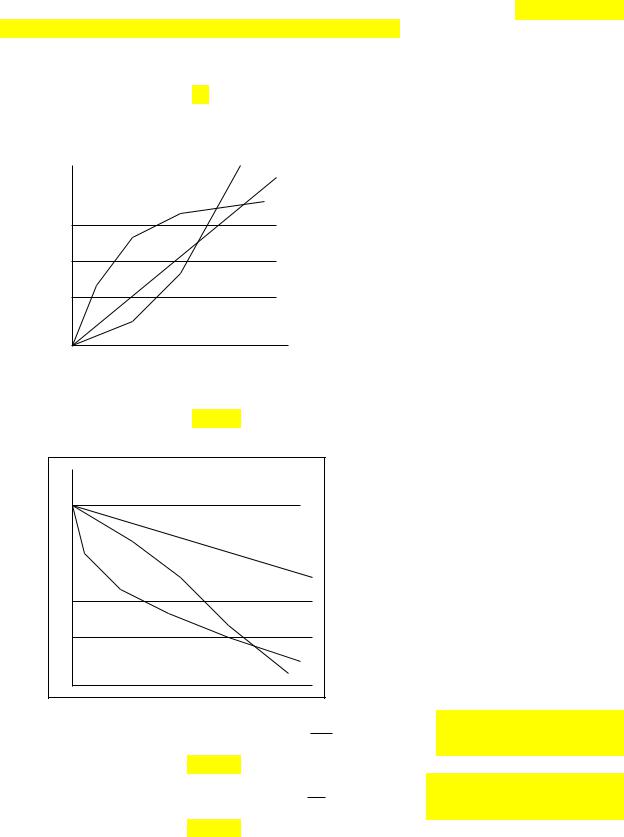
1.85 График, изображенный на рисунке, соответствует переходному процессу в электроприводе с активным статическим моментом.
ω
t
0
1.86 График, изображенный на рисунке, соответствует переходному процессу в электроприводе с реактивным статическим моментом

ω |
t |
0 |
1.87 Сравните динамические моменты до и после точки А |
|
ω |
|
А |
t |
0 |
|
Динамический момент до точки А больше чем после точки А.
1.88 Размерность коэффициента жёсткости механической системы равна Н м с
1.90Статический момент Мс=100 Нм, приведенный к валу электродвигателя составит
12,5 Нм (iр = 10, ήм = 0,8)
1.91Момент инерции механизма Jм = 100 кгм2, приведенный к валу электродвигателя составит 1кгм2 (iр = 10, ήм = 0,8)