

Лабораторная работа №4 (3)
.docxВиниченко Анастасия, ивт-44
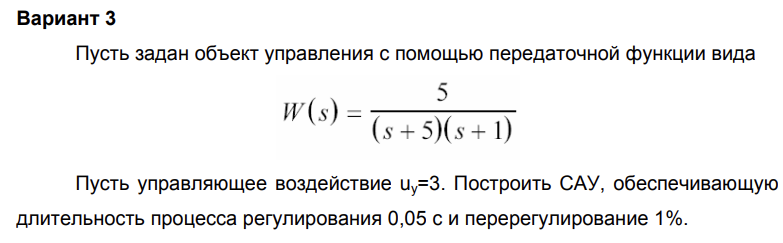
Вариант № 3
Лабораторная работа №4 (3).
Синтез линейных САУ с помощью метода
Модального управления.
1
cls, clear, close all;
T1 = 5;
T2 = 1;
k = 5;
uy = 3;
tp = 0.05;
phik = 34.3;
A = [-T1, 0; 1 -T2];
B = [k; 0];
% Проверка на управляемость
if det([B, A*B]) ~= 0
disp('Система управляема');
else
disp('Система не управляема');
end
syms x
ak = -3/tp
bk = round(double(vpa(solve(100*exp(ak*pi/x) - 5, x))))
s1 = ak + 1i*bk;
s2 = ak - 1i*bk;
phis1 = 180 - angle(s1)*180/pi;
phis2 = -180 - angle(s2)*180/pi;
fprintf('Угол 1-го полюса = %d \n', round(phis1))
fprintf('Угол 2-го полюса = %d \n', round(phis2))
syms s
Dzamk = expand((s - s1).*(s - s2)) %Уравнения замкнутой и разомкнутой систем
Drazom = expand((s + T1)*(s + T2))
alpha = coeffs(Dzamk);
d = coeffs(Drazom);
l = [alpha(1) - d(1), alpha(2) - d(2)]'
AA = [ 0, 1; -d(1), -d(2),] % Матрицы для поиска вектора управления
BB = [0; 1]
CT = double(-l' * [BB, AA*BB]*inv([B, A*B])) % Вектора управления
Система управляема
ak = -60
bk = 63 Угол 1-го полюса = 46 Угол 2-го полюса = -46 Dzamk = s^2 + 120*s + 7569 Drazom = s^2 + 6*s + 5 l =
7564 114 AA = [ 0, 1] [-5, -6] BB = 0 1 CT = 1.0e+03 * -0.0228 -1.4900
2
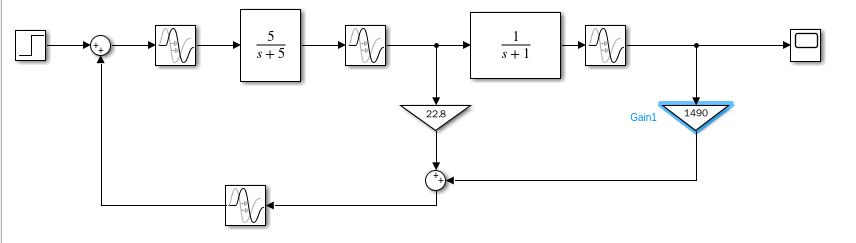
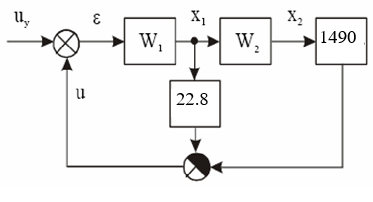
Рис. Схема САУ
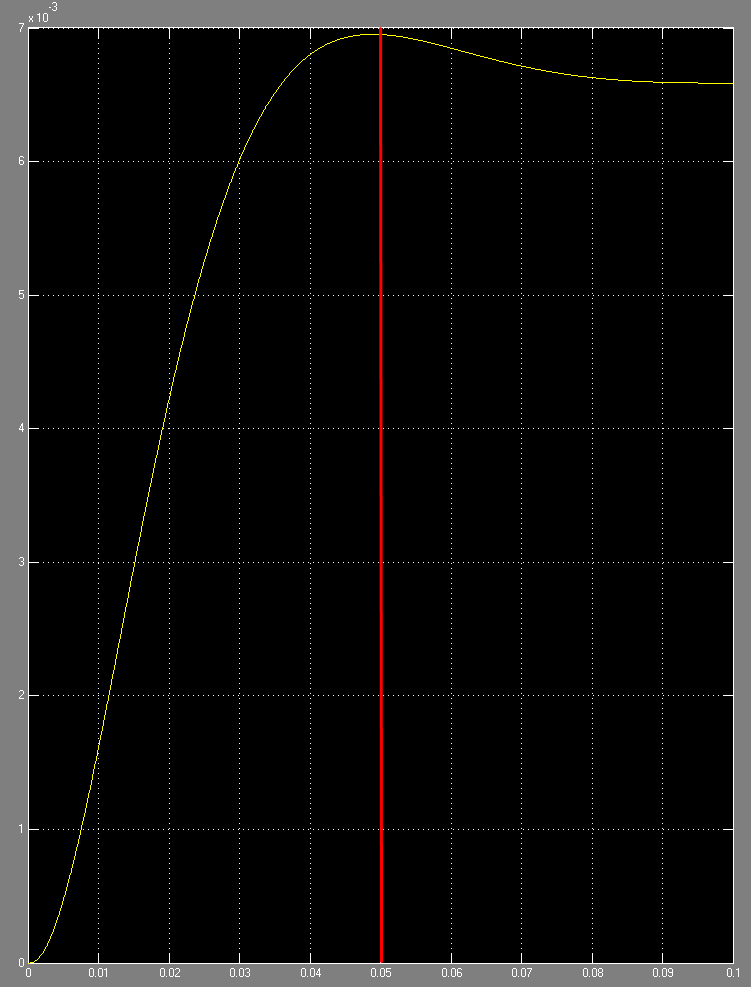
Рис. 3 Переходная функция САУ
В значении 0.05 секунд переходный процесс имеет своё пиковое значение.
Система может считаться достаточно качественной, так как время регулирования мало, перерегулирование не превышает 5%, число колебаний в период регулирования не доходит даже до полной единицы, от того и время достижения первого максимума и время нарастания переходного процесса также малы, декремент затухания небольшой.