Лабораторная работа №3 (2)
.docxВиниченко Анастасия, ивт-44
Вариант № 3
Лабораторная работа №3 (2).
Исследование устойчивости систем автоматического управления.

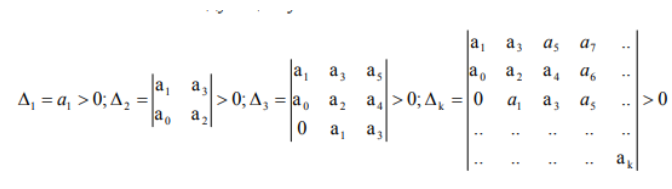
Метод Гурвица:
function f = u_gurv
n = 3;
T_1 = 0.6;
T_2 = 0.5;
s = 0.03;
a0=T_1*(T_2)^2;
a1=2*s*T_1*T_2+(T_2)^2;
a2=T_1+2*s*T_2;
a3=1;
A=zeros(3,3);
A(2,1) = a0; A(1,1) = a1; A(3,2) = A(1,1); A(2,2) = a2;
A(3,3) = a3; A(1,2) = A(3,3);
A(1,3)=0; A(2,3)=0; A(3,1)=0;
A
A1=[A(1,1:2);A(2,1:2)];
b=0;
if A(1,1)>0
b=b+0;
else
b=b+1;
end
if det(A1)>0
b=b+0;
else
b=b+1;
end
if det(A)>0
b=b+0;
else
b=b+1;
end
if b==0
disp('Система устойчива');
else
disp('Система неустойчива');
end

Система устойчива, т.к. выполняются необходимое и достаточное условия:
Метод Михайлова:
1) Критерий Михайлова: для того, чтобы система автоматического управления была устойчива, необходимо и достаточно, чтобы кривая (годограф) Михайлова при изменении частоты w от 0 до , начинаясь при w = 0 на вещественной положительной полуоси, обходила только против часовой стрелки последовательно n квадрантов координатной плоскости, где n – порядок характеристического уравнения.
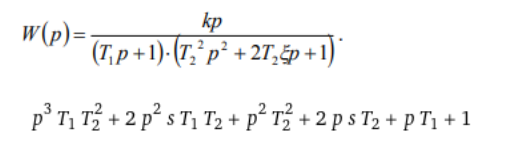
Передаточная функция:
clear all, clc
k=3;
T1=0.6;
T2=0.5;
e=0.03;
p = [0.0001:0.01:15]*1i;
D = (T1.*p+1).*(T2^2.*p.^2 + 2*e*T2.*p + 1)
Re = real(D);
Im = imag(D);
hold on
plot(Re, Im, 'r')
xlabel('Re(W)')
ylabel('Im(W)')
grid on
grid on
axis([-8 8 -8 8])
quiver(-7,0,14,0, 'black')
quiver(0,-7,0,14, 'black')
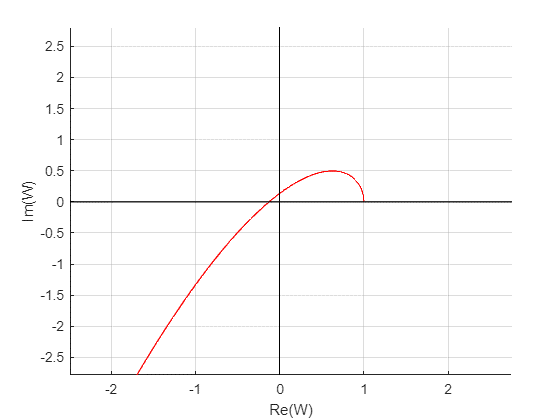
Исходя из вида годографа Михайлова видно, что система устойчива. Так как годограф начинается на действительной положительной оси и проходит против часовой стрелки n-квадрантов, где n-порядок системы. В данном случае n=3.
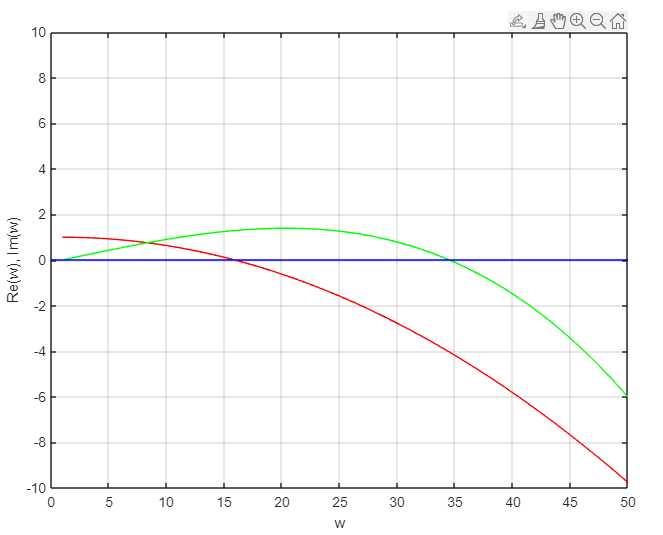
2) Критерий Михайлова: для того, чтобы система автоматического управления была устойчива, необходимо и достаточно, чтобы корни X(w) и Y(w) были действительны и чередующиеся, а их общее количество равно порядку n, и при w=0 X(0) > 0 и Y(0)’ > 0.
figure()
plot(Re, 'r')
hold on, grid on;
plot(Im, 'g')
line([0, 50], [0, 0], 'Color', 'b')
axis([0 50 -10 10])