

Модель а
2b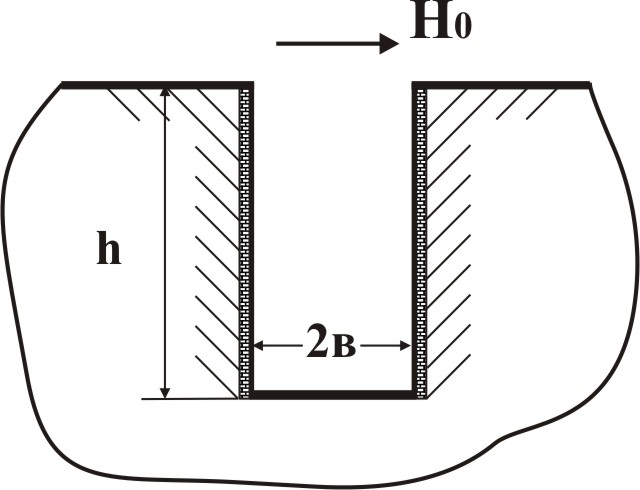
Модель в
2b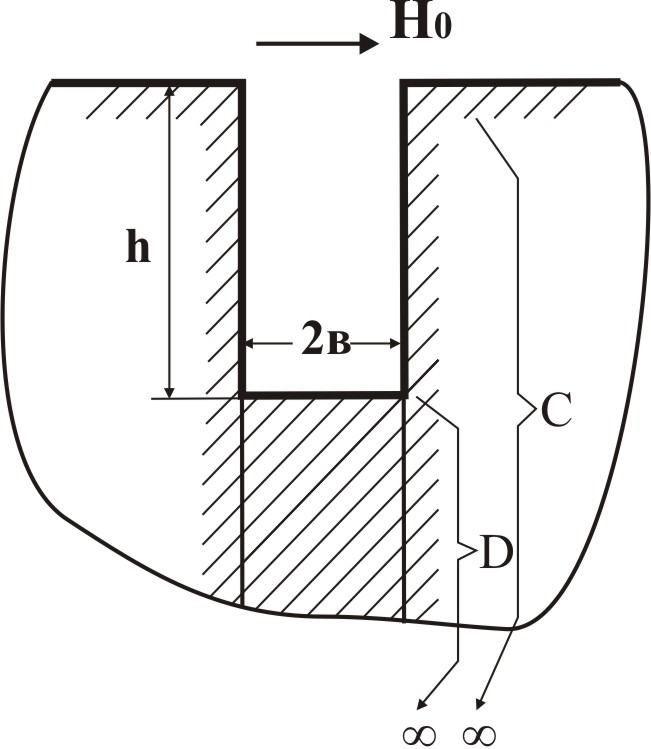
Рис. 3.3 Распределение потока рассеяния
трещины конечной глубины по Н. Н. Зацепину
и В. Е. Щербинину (в модели А) и по Фёрстеру (в модели В)
Поле рассеяния модели А рассчитано по методу [8], при котором поле ленточного диполя с постоянной магнитной плотностью заряда приравнивают к полю рассеяния щели конечной глубины h и ширины 2b. Полученные уравнения для компонент Hx и Hy имеют вид:
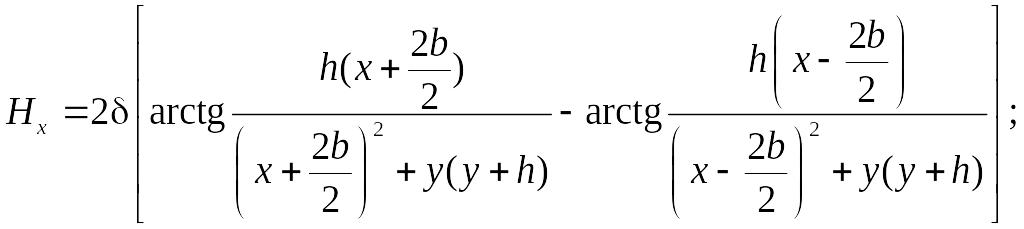
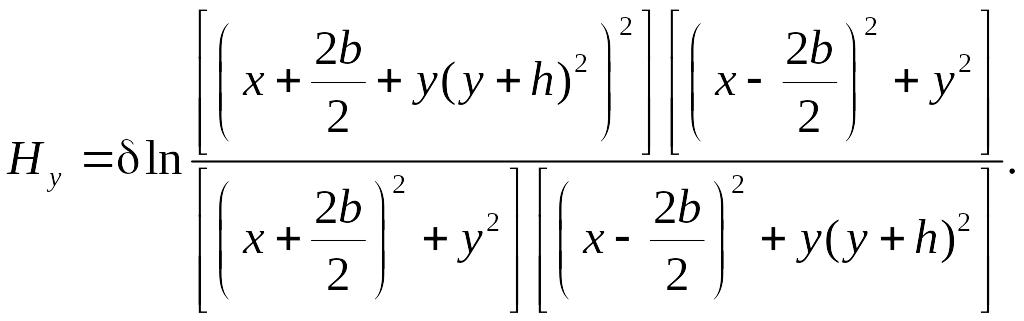
где δ – плотность магнитных зарядов (неизвестная величина).
Для модели В на основании строгого решения полей рассеяния бесконечно глубокой трещины получены приближенные уравнения. Затем определён «вклад» трещины глубиной h во внешний поток рассеяния дефекта от общего действия бесконечно глубокой трещины путем образования разности между общим действием бесконечно глубокой трещины C и действием части трещины конечной глубины D, которая начинается ниже глубины h [9].
Полученные уравнения для компонент Hx и Hy имеют вид:


где Hs – напряженность магнитного поля внутри трещины.
Результаты расчетов для обеих моделей А и В приведены на рис. 3.4. При этом обе кривые Нх и Ну делятся на значение Нхmах при х = 0. Тогда максимум Нх для обеих моделей А и В без знания δ и Hs будет иметь значение 1. Для модели А расчетные точки изображены кружками, для модели В – крестиками. Топография кривых для Нх/Нхmах и Ну/Нхmах хорошо совпадает: след окружности (модель А) и крестика (модель В) явно соответствуют совершенно одинаковым кривым.
Экспериментальные исследования закономерностей в распределении полей рассеяния дефектов могут быть исследованы с помощью устройств активного типа, например, феррозондов [12].
Нх/Нхmах Ну/Нхmах
x,
мм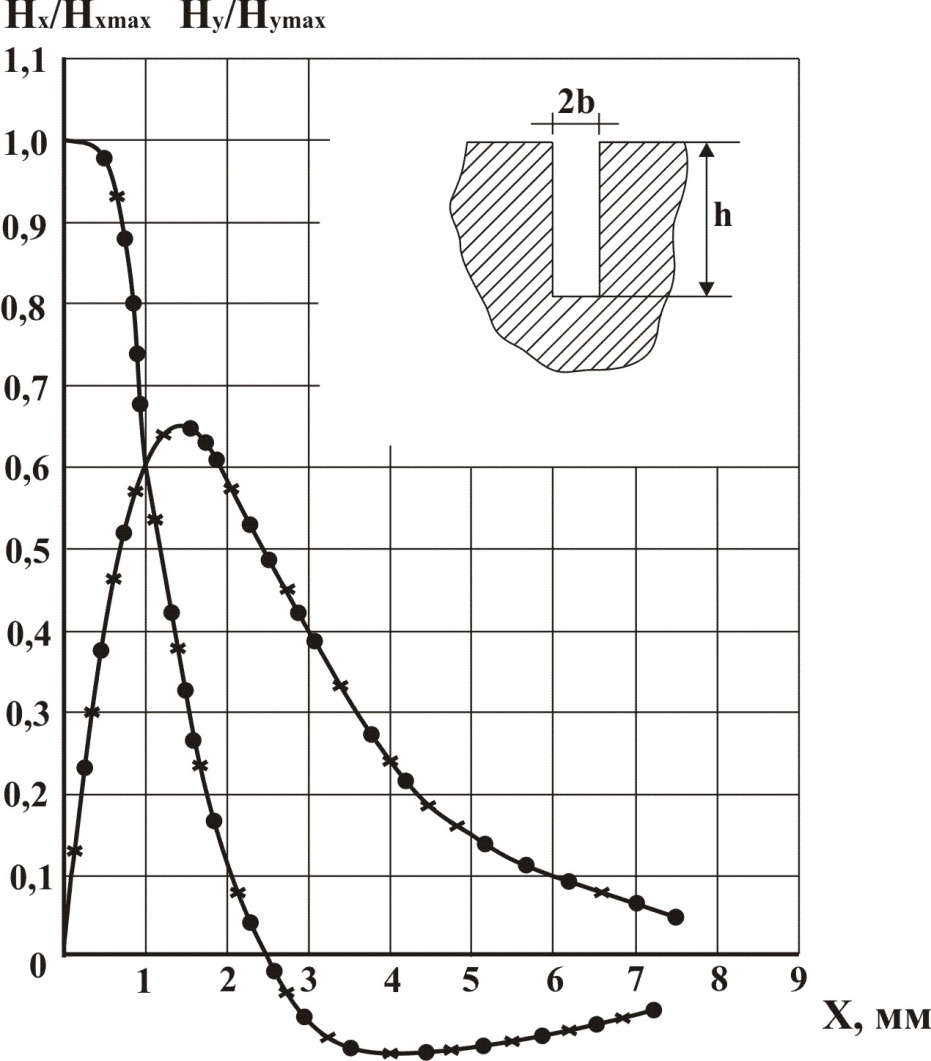
Рис. 3.4 Сравнение топографии Нх/Нхmах и Ну/Нхmах
для моделей А и В (h = 1 мм; 2b = 0,2 мм; y = 1 мм)
4 Магнитные преобразователи
Как отмечалось в разд. 1, в названии любого метода НК должны присутствовать классификационные признаки, свойственные данному методу магнитного НК. В названии каждого из приведенных на рис. 1.1 методов присутствует тот или иной магнитный преобразователь. Вообще, магнитный преобразователь – это преобразователь, предназначенный для измерения, регистрации и (или) индикации магнитного поля при магнитном НК [7, 12]. В зависимости от принципа действия магнитных преобразователей их можно разделить на три группы:
магнитные преобразователи, непосредственно преобразующие магнитное поле в электрический сигнал, который в дальнейшем анализируется (феррозонды, преобразователи (датчики) Холла, индукционные преобразователи, магниторизисторы);
магнитные преобразователи, при помощи которых распределение магнитного поля над КО устанавливается визуально или с помощью оптических средств (магнитный порошок, магнитно-домен-ные плёнки);
магнитные преобразователи, в которых магнитное поле рассеяния дефекта преобразуется во вторичное магнитное поле промежуточного носителя информации, причем вторичное поле исследуется каким-либо преобразователем из первой группы (магнитная лента).
Достоинства и недостатки всех преобразователей первой группы примерно одинаковы. Преобразователи высокопроизводительны, выдают на выходе электрический сигнал в удобной для количественного анализа форме, позволяют автоматизировать процесс контроля, чувствительны к наружным и внутренним дефектам, достаточно надежны. К недостаткам относят локальность области контроля, и, как следствие, влияние на результаты контроля геометрических размеров, формы, краёв КО, высокую чувствительность преобразователей к различным неоднородностям металла.
Как следует даже из названия, свойства каждого магнитного преобразователя во многом будут определяться, во-первых, теми физическими явлениями, которые положены в основу их принципа действия, а во-вторых, их параметрами и техническими характеристиками.
Существуют и другие классификации магнитных преобразователей: по способу получения первичной информации и по принципу действия. В первом случае преобразователи разделяют на полемерные и градиентометрические. По принципу действия различают индукционные, феррозондовые, гальваномагнитные, магниторезистивные, магнитооптические (магнитодоменные) преобразователи, магнитные ленты и магнитные порошки.
Рассмотрим принципы действия и особенности применения некоторых магнитных преобразователей.