

4.2 Индукционные преобразователи
В основу принципа действия индукционных преобразователей положен закон электромагнитной индукции (закон Фарадея), согласно которому во всяком замкнутом проводящем контуре с числом витков W при изменении потока магнитной индукции Ф во времени t через площадь S, ограниченную этим контуром, возникает ЭДС индукции:
е
y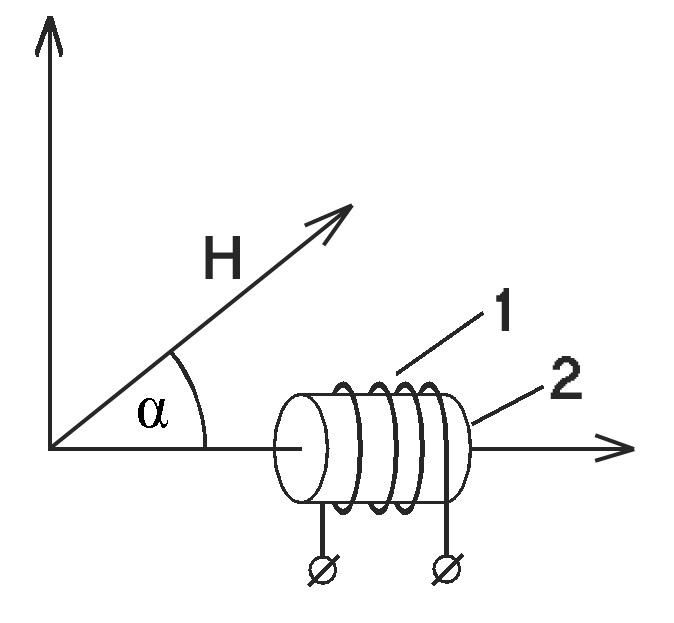
З
x
Ф
Рис.
4.6 Катушка 1
с
сердечником 2
в
магнитном поле
В том случае, когда размеры контура, охватывающего площадь S, остаются неизменными и он не изменяет положения относительно вектора Н, появляется так называемая трансформаторная ЭДС индукции:
е(t) = –μ0μтWScosαdН/dt.
Если же магнитная индукция постоянна, то можно изменить магнитный поток во времени, поворачивая контур вокруг оси, перпендикулярной вектору Н. При этом возникает так называемая ЭДС движения:
е(t) = –μ0μтWНcosαdS/dt.
Магнитные преобразователи, использующие трансформаторную ЭДС, называют пассивными, и они могут применяться только в переменных магнитных полях. Магнитные преобразователи, использующие ЭДС движения, называют активными, они могут использоваться для измерения постоянных магнитных полей.
В магнитной дефектоскопии часто приходится иметь дело с переменными полями (во времени или пространстве), поэтому широко используются пассивные преобразователи. В простейшем случае они представляют катушку, размеры которой достаточно малы, чтобы можно было считать магнитное поле в ней однородным. Это, как правило, короткие однослойные катушки, намотанные тонким проводом, чтобы можно было пренебречь толщиной намотки по сравнению с диаметром катушки.
При намагничивании изделия переменным полем (например, промышленной частоты) могут быть измерены составляющие поля рассеяния дефекта Hx и Hy или с помощью комбинации двух катушек – его градиент. Важным моментом является также и величина S катушки: е(t) → 0 при S → 0, но при увеличении S падает чувствительность к полям дефектов вследствие их малой локализации. При контроле объектов, в которых дефекты являются протяжёнными (изделия проката), используют удлиненные вдоль ожидаемого направления дефектов катушки.
При намагничивании постоянными полями необходимо движение катушки относительно КО. Наиболее удобными объектами контроля являются три типа изделий: плоские длинные изделия с поперечными дефектами, когда достаточно осуществить только продольное перемещение катушки; цилиндрические изделия, когда осуществляется вращение преобразователей по окружности изделия, и плоские изделия – в этом случае осуществляется вращение катушки в плоскости КО. Есть несколько особенностей, которые следует учитывать при организации такого контроля.
Пусть для определенности катушка движется вдоль оси x. При μт = 1 и cosα = 1
е = –μ0WSVdН/dх,
где dх/dt = V – скорость перемещения катушки.
Видно, что индукционная катушка реагирует только на изменение поля, а не на его абсолютную величину, и поскольку поле рассеяния дефекта локально, то оно может быть выявлено на фоне большого намагничивающего поля. Кроме того, чтобы связь между градиентом измеряемого поля и выходным сигналом была однозначной, необходимо иметь V = const.
Приведём два примера.
1. Скоростной магнитный контроль рельсов с помощью вагона-дефектоскопа [17].
Скорость вагона-дефектоскопа невозможно поддерживать одинаковой на всех контролируемых участках пути. На рис. 4.7 показаны сигналы от одного и того же дефекта. Видно, что сигналы могут сильно различаться в зависимости от V.
2. Образование ЭДС индукционного преобразователя от поля равной амплитуды, но разной протяженности вдоль оси x. Графически можно показать, что при V = const вклад их в величину е будет разным. В одном случае это позволяет считать поле полем трещины, а в другом – полем магнитной неоднородности.
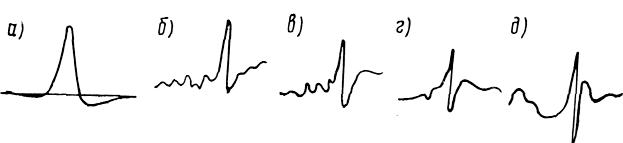
Рис. 4.7 Осциллограммы импульсов ЭДС индукционного преобразователя,
характеризующие изменение формы продольной составляющей
поля рассеяния дефекта со скоростью:
а – V = 0; б – V = 4 км/ч; в – V = 12; г – V = 30; д – V – 50 км/ч
Как уже было отмечено, все пассивные преобразователи могут применяться только в переменных полях. Но часто возникают задачи, когда необходимо измерять параметры постоянных полей, например, при намагничивании деталей постоянными магнитами и особенно при размагничивании деталей после контроля. Для этих целей используют активные индукционные преобразователи.