

1 курс 2 сем БТС Боброва / Пункт 3 + выступление / 0501_Конунников
.pdfисполнительного механизма, который преобразует цифровые команды в механические действия.
Для коррекции движения используются датчики обратной связи,
которые включают в себя датчики угла поворота колена, датчики угла поворота лодыжки и датчики касания. Блоки датчиков касания носка и пятки необходимы для определения фаз ходьбы переднего и заднего толчка в моменты касания или отрыва от опоры. Сигнал усиливается и оцифровывается АЦП 3, выходной сигнал которого поступает в центральное микропроцессор.
Беспроводный блок управления состоит из радиотрансивера,
принимающего и передающего сигналы между смартфоном и центральным микропроцессором.
Блок питания подключается через USB порт, который управляется USB
процессором, соединенным с центральным микропроцессором. [8].
Схема исполнительного механизма представлена на рисунке 2.
11
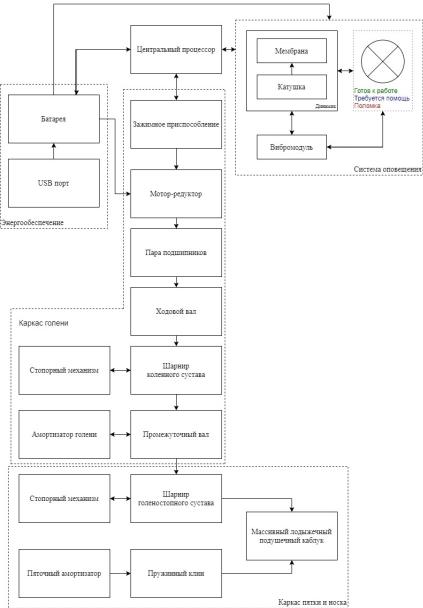
Рисунок 2 – Схема исполнительного механизма
Центральный процессор подает сигнал зажимному приспособлению в гильзе, которая подает электрический заряд мотору-редуктору. Мотор-
редуктор преобразует энергию во вращающий момент, который передается на ходовой вал, скрепленный парой подшипников на торцах вала. Шарниры обеспечивают передачу крутящего момента при углах поворота до 70
градусов относительно оси, стопорные механизмы фиксируют угол и сбег угла для шарниров. Амортизаторы на всех уровнях предназначены для гашения колебаний и поглощения толчков и ударов подвижных элементов протеза. Массивный лодыжечный подушечный каблук предназначен для
12
страховки протеза и ноги от сильного напряжения на осевые механизмы.
Пружинный клин служит опорой, заменяя стопу человека.
Батарея встроенная в протез по закрытому типу, питает центральный процессор, мотор-редуктор и систему оповещения. Ее подзарядка происходит через USB модуль встроенный на ней.
Система оповещения, состоящая из динамика, лампочки и вибромодуля получают сигнал от центрального процессора и функционирую в зависимости от ситуации и/или воздействия на ниx.
2.2 Функциональная схема
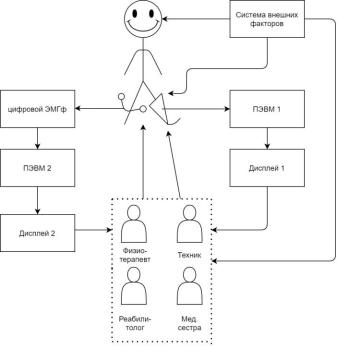
Функциональная схема представлена на рисунке 3.
Рисунок 3 – Функциональная схема
Протез подсоединяется к персональной электронно-вычислительной машине-1 (ПЭВМ-1), который на дисплей-1 выводит электромиограмму с культи бедра, рабочие параметра протеза. На другой ноге наложены электроды от цифрового электромиографа, подключенного к персональной электронно-вычислительной машине-2 (ПЭВМ-2), который выводит данные
13
на дисплей-2. Врачи и техник анализируют полученную информацию,
выполняют необходимую коррекции. Система внешних факторов влияет на пациента, врача, техника, протез.[6].
Система внешних факторов:
Климатические.
Факторы жизнедеятельности.
Техногенные - короткое замыкание, высокое напряжение.
Экологические.
Факторы стресса.
14
3. Разработка алгоритма регистрации и обработки сигнала
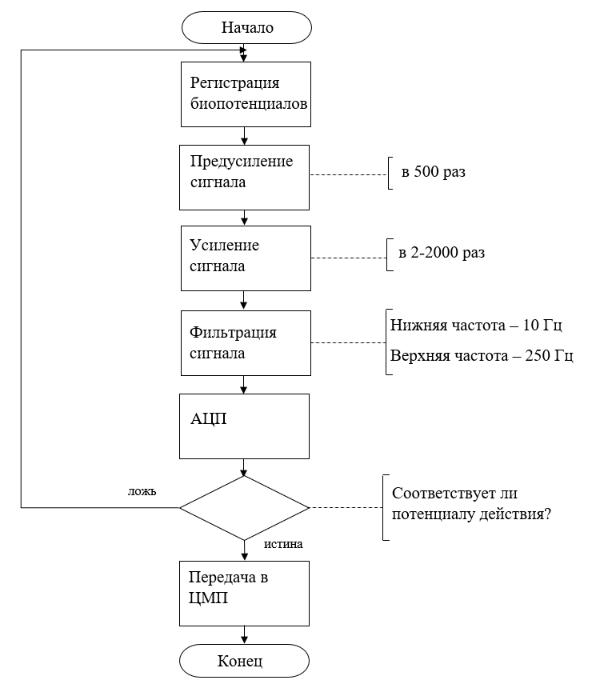
Алгоритм регистрации и обработки сигнала представлен на рисунке 3.
Рисунок 3. – Алгоритм регистрации и обработки сигнала
Для снятия сигнала необходимы активный, пассивный,
индифферентный (референтный) электроды. Активный электрод находится над двигательной точкой мышцы или над нервом, т.е. в активной зоне
15
генерации потенциала, а референтный электрод отнесен от точки регистрации на некоторое расстояние (на сухожилие мышцы или на 2–3 см от точки проекции нерва), т.е. находится вне зоны генерации потенциала.
Согласно договоренности, активным электродом считается тот электрод, под которым разность потенциалов является отрицательной. Условным обозначением активного электрода является знак «–», а референтного – знак
«+». Обе пластины накожного биполярного регистрирующего электрода для регистрации потенциала сенсорного нерва обычно располагают над нервом с межэлектродным расстоянием 4 см. [8].
Частота дискретизации – 1000 Гц.
16
Список литературы
1.Съем и обработка биоэлектрических сигналов: Учеб. пособие / Под ред. К. В. Зайченко. СПбГУАП. СПб., 2001.
2.Жизнь после ампутации конечностей: от видов и последствий операции до методов реабилитации. Комсомольская правда: https://www.kp.ru/guide/amputatsija-konechnostei.html
3.Поиск информативных количественных показателей электромиографического сигнала: Научная статья / А. И. Бых, Т. В.
Жемчужкина. 2008.
4. Информационно-измерительная система бионического протеза нижней конечности / Г. А. Солодимова, А. Н. Спиркин // Измерение.
Мониторинг. Управление. Контроль. 2018.
5.Протезирование конечностей. [Электронный ресурс]. Режим доступа: http://www.xda.su/artificiallimbs/ArtificiallimbsUpperlimbprostheses/
6.Биоэлектрическое управление / В.С. Гурфинкель, В.Б. Малкин, М.Л.
Цетмин, А.Ю. Шнейдер. М: Наука.
7. Информационные системы. Автоматизация системы и управления:
Статья / А.А. Большаков , В.П. Глазков.
8. Стимуляционная электромиография: учебное пособие для врачей/
Артемова Н.М., Везенова И.В., Соколов А.В.
9. Модель ЭМГ. Изучение принципов работы электромиографа:
Учебное пособие / 2012.
10. Электромиография: Научная статья: http://vmede.org/sait/?page=150&id=msprav_Nevrologijainejrohirurgija&menu= msprav_Nevrologijainejrohirurgija
17