

Изменение угла ввода при изменении температуры на 10 °с
Угол ввода, 1 |
35 |
45 |
60 |
70 |
10 ºС |
0,5 |
0,6 |
0,7 |
0,7 |
Обратимся к рассмотрению зависимости угла 1 от затухания и связанной с этим погрешности измерения координат.
При значительном затухании ультразвука на пути от преобразователя до отражателя величина угла ввода оказывается существенно меньше величины угла наклона акустической оси преобразователя (рис. 4.5). Объясняется это тем, что при смещении отражателя от акустической оси диаграммы направленности преобразователя увеличение амплитуды эхосигнала за счет снижения потерь на затухание превышает падение амплитуды вследствие направленных свойств преобразователя. Чем меньше направленность поля преобразователя и чем больше затухание, тем значительнее отклонение 1 от С.
Уменьшение угла ввода луча с увеличением глубины расположения отражателя создает представление о квазиискривлении центрального луча диаграммы направленности наклонного преобразователя при контроле металлов с большим затуханием. При малом затухании ультразвука ( < 0,1 дБ/мм) не происходит заметного отклонения акустического луча под влиянием затухания. Таким образом, при малых затуханиях углы 1 и 0 можно считать равными.
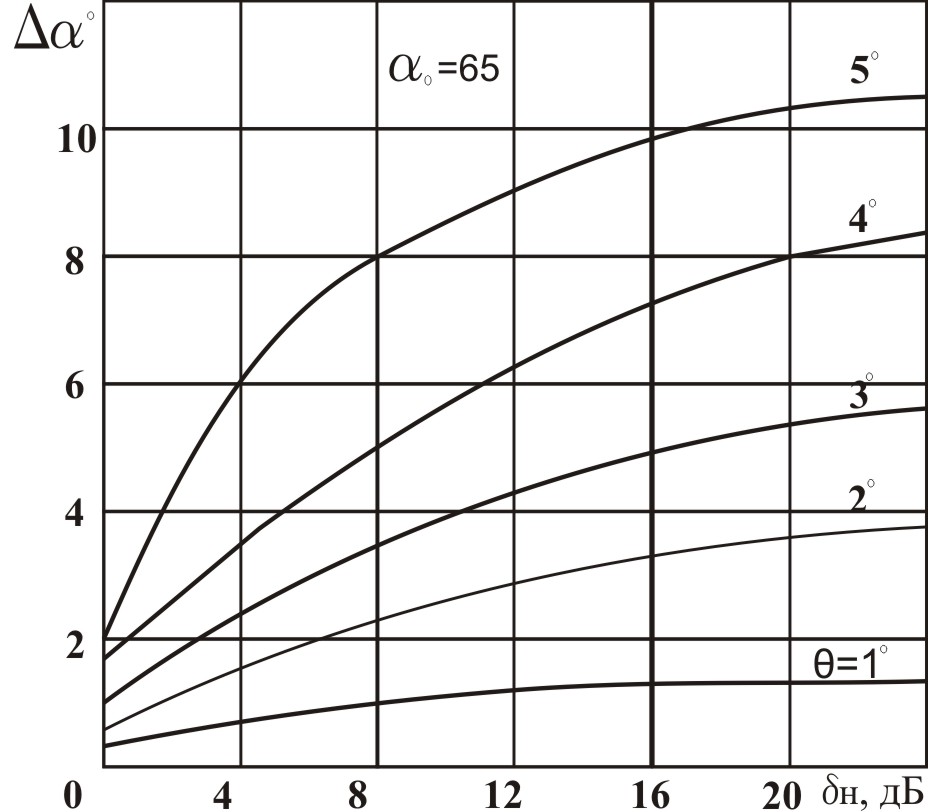
Рис. 4.5. Зависимость величины отклонения = 1 – С от угла θ раскрытия основного лепестка диаграммы и затухания ультразвука H
Обычно для малоуглеродистых сталей влияние затухания учитывают при Н 80–100 мм.
Изменение 1 из-за истирания призмы тем больше, чем больше значение 1. Так, для преобразователя с β = 50º Δα ≈ 2,2 Δβ.
Если плоскость основания призмы не параллельна поверхности металла, то 1 зависит от акустических свойств контактирующей среды и величины угла φ между плоскостью призмы и поверхностью металла. Изменение 1 из-за наклона призмы также тем больше, чем больше 1. Для случая ввода колебаний в сталь через прослойку воды и преобразователя с = 50º Δα ≈ 5,4φ.
Видно, что изменение угла ввода луча, вызываемое подъемом призмы на 1°, значительно больше, чем при износе призмы на 1º. Если принять допустимым отклонение 1 ≤ 2º, то при = 50º износ призмы не должен превышать величину = 1º, а подъем φ = 0,4º (рис. 4.6).
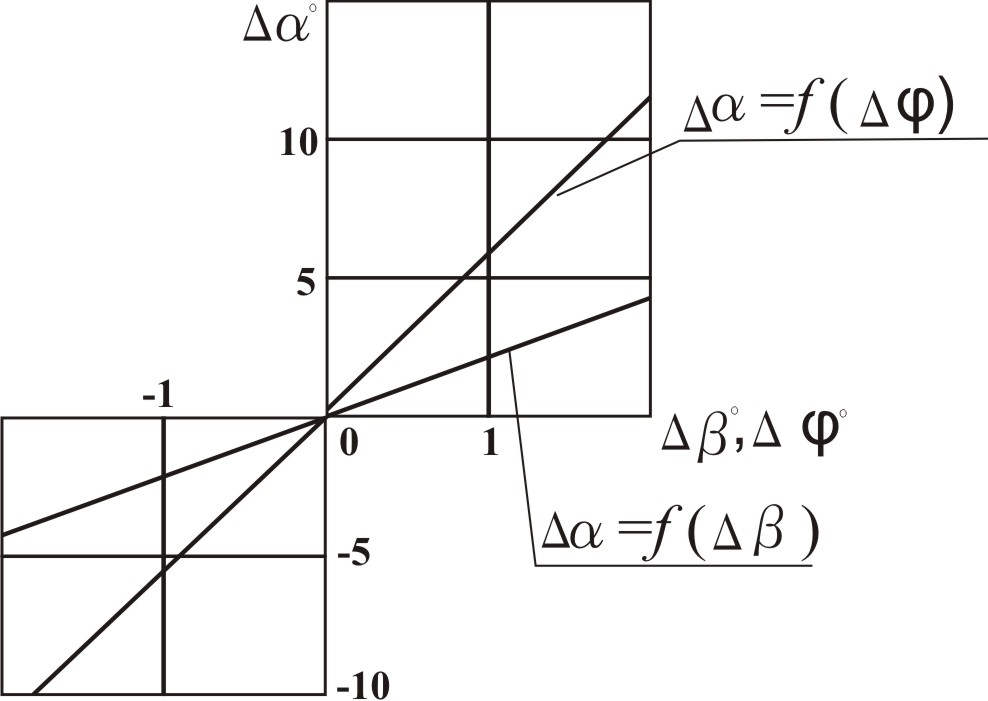
Рис. 4.6. Зависимость приращения угла ввода луча в стали
от угла износа призмы и угла ее подъема
Суммарная систематическая погрешность измерения координат складывается из ряда составляющих и для ее уменьшения необходимо:
1. Обеспечивать равенство или близость параметров, входящих в выражения для Нд и Lд, к их номинальным значениям (например, производить настройку глубиномера в условиях, близких к условиям контроля). При невозможности такого подхода вводить соответствующие поправки, взятые из справочника.
2. Регулярно производить калибровку прибора с помощью эталонных и стандартных образцов.
Общая погрешность измерения координат складывается из систематической и случайной составляющих, причем учитывать и ту и другую необходимо в случае, если их вес одного порядка.