

Государственное образовательное учреждение
высшего профессионального образования
«ПЕТЕРБУРГСКИЙ
ГОСУДАРСТВЕНЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ»
Кафедра «Методы и приборы неразрушающего контроля»
Магнитоферрозондовый метод контроля
Методические указания
к лабораторной работе № 72
по дисциплине
«Методы магнитного контроля»
САНКТ-ПЕТЕРБУРГ
2007
Цель работы
Изучение основных технологией магнитоферрозондового метода контроля деталей и узлов подвижного состава. Приобретение навыков по настройке чувствительности и проведению контроля деталей магнитоферрозондовыми дефектоскопами.
Общие сведения
Магнитоферрозондовый метод контроля основан на обнаружении феррозондовым преобразователем (ФП) магнитных полей рассеяния дефектов в предварительно намагниченных деталях и предназначен для выявления поверхностных и подповерхностных дефектов типа нарушений сплошности: волосовин, плен, трещин, ужимов, закатов, раковин и др. Феррозондовый преобразователь реагирует на резкое пространственное изменение напряженности магнитного поля над дефектами и преобразует градиент напряженности поля в электрический сигнал.
Выбор феррозондовых преобразователей в качестве индикаторов магнитного поля рассеяния над дефектами в намагниченной детали обусловлен рядом преимуществ: малой потребляемой мощностью, незначительными габаритами, высокой надежностью работы, высоким КПД и избирательностью к локальным магнитным полям рассеяния.
Большинство приборов с использованием феррозондовых преобразователей строится по схеме, представленной на рис. 1.
Генератор (Г) питает обмотки ФП стабилизированным переменным напряжением частотой f. Из сигнала, поступающего с феррозондовых преобразователей и несущего весь спектр частот f∑, полосовым фильтром (ПФ) выделяется вторая гармоника 2f, несущая информацию о внешнем магнитном поле. Сигнал усиливается усилителем (У), детектируется детектором (Д) и поступает на индикатор (И) (стрелочный прибор, сигнальная лампа или исполнительный механизм).

Рис.1. Схема построения приборов с феррозондовыми
преобразователями
Чувствительность феррозондового контроля определяется совокупностью физических факторов (магнитными свойствами материала контролируемого изделия, типом дефектов и их ориентацией, шероховатостью контролируемой поверхности, способом контроля и намагничивания деталей, чувствительностью ФП и электронной аппаратуры, способом обработки сигнала ФП).
ГОСТ Р21104-02 устанавливает одиннадцать условных уровней чувствительности, которые представлены в таблице 1.
Таблица 1
Условные уровни чувствитель-ности |
Минимальные размеры выявляемых дефектов, мм |
Максимальная глубина залегания дефекта, мм |
||
Ширина |
Глубина |
|||
|
Поверхностные |
|
||
А1 |
От 0,002 до 0,005 |
От 0,007 до 0,15 |
_______
|
|
А2 |
От 0,005 до 0,012 |
|||
А3 |
От 0,012 до 0,020 |
|||
А |
0,1 |
0,2 |
||
Б |
От 0,1 до 0,2 |
От 0,2 до 1,0 |
||
|
Подповерхностные |
|
||
B1 |
От 0,2 до 0,004 |
От 0,2 до 0,15 |
10 |
|
В |
0,3 |
0,5 |
10 |
|
Г1 |
0,3 |
От 0,5 до 1,0 |
20 |
|
Г |
0,3 |
От 0,5 до 1,0 |
10 |
|
Д1 |
От 0,3 до 0,5 |
От 0,5 до 1,0 |
30 |
|
Д |
От 0,3 до 0,5 |
От 0,5 до 1,0 |
5 |
|
Чувствительность контролируют на стандартных настроечных образцах, имеющих естественные или искусственные дефекты.
Феррозондовому контролю на железнодорожном транспорте подвергаются, например, боковые рамы и надрессорные балки тележек грузовых вагонов, балансиры и соединительные балки тележек, рамы тележек ЦМВ, КВЗ И2, КВЗ-ЦНИИ, корпуса автосцепок, тяговые хомуты поглощающих аппаратов и др. Минимальная длина выявляемого дефекта должна быть равна 2 мм.
В зависимости от схемы включения катушек (рис. 2) ФП может измерять либо среднее значение нормальной Нп составляющей поля в объеме, занимаемом стержнями, либо разницу полей (градиента нормальной составляющей поля), в которых находятся первый и второй сердечники. Напряжённость поля измеряется в А/м, а градиент поля в А/м2.
Расстояние Δх между сердечниками называется базой ФП. Для большинства деталей Δх = 4 мм, а для деталей сложной формы (например, хвостовик автосцепного устройства) Δх = 3 мм.
Надписи на этикетках ФП-градиентометров выполнены желтым цветом на черном фоне (например, МДФ 9405.30), а на этикетках ФП-полемеров — пурпурным, либо белым цветом на черном фоне (например, МДФ 9405.130-01).
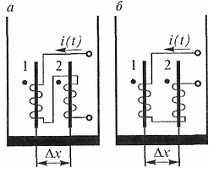
Рис. 2. Схема включения обмоток феррозондового преобразователя:
а – схема включения обмоток для измерения градиента
б – схема включения обмоток для измерения напряжённости поля
Для проведения магнитоферрозондового контроля будем использовать прибор Ф-205.30А. Описание и методика работы с прибором приведены в приложении.