

Л6
.docxОтчёт по лабораторной работе №6
Дискретизация аналоговых регуляторов
Вариант: 13
Аналоговый ПИД-регулятор
Модель судна:

Требуемые параметры: время переходного процесса, показатель колебательности:
Tпп = 18, M = 1.3
Передаточная функция ПИД-регулятора:
C(s)
=

Параметры ПИД регулятора в классической форме:
Kc = 9.748
KI = 0.272
KD = 81.21
TD = 1.156
Дискретизация аналогового ПИД-регулятора
Метод Эйлера:
Ceuler(z)
=

Метод Тастина:
Ctustin(z)
=

Фиктивное квантование:
CF(z)
=

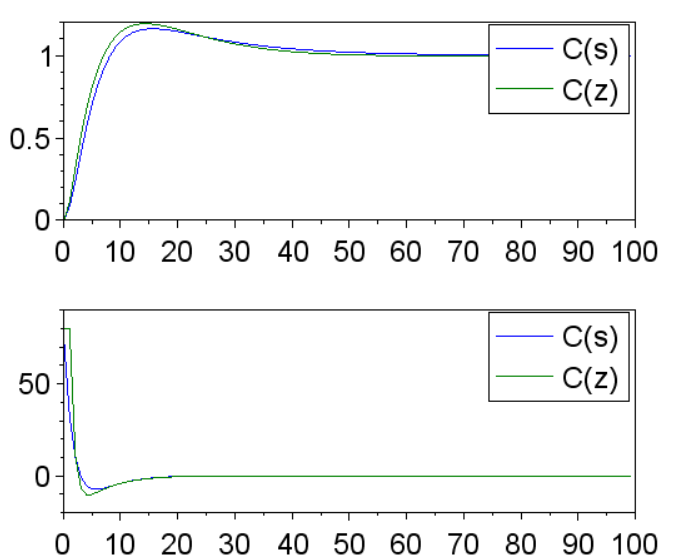
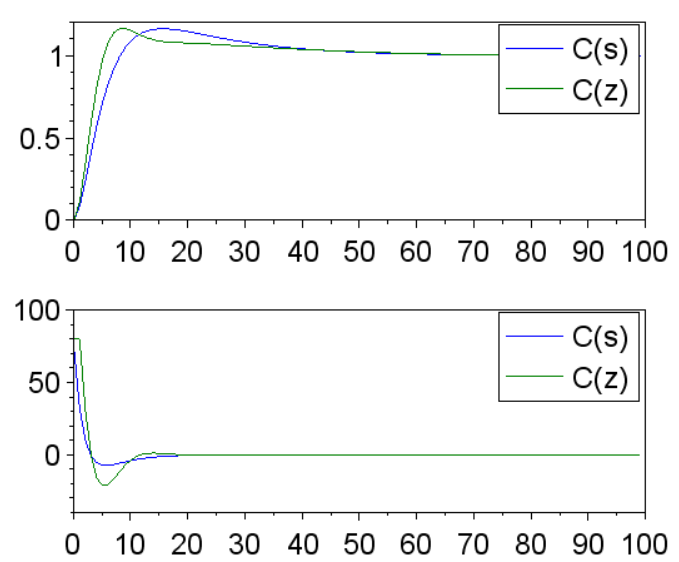
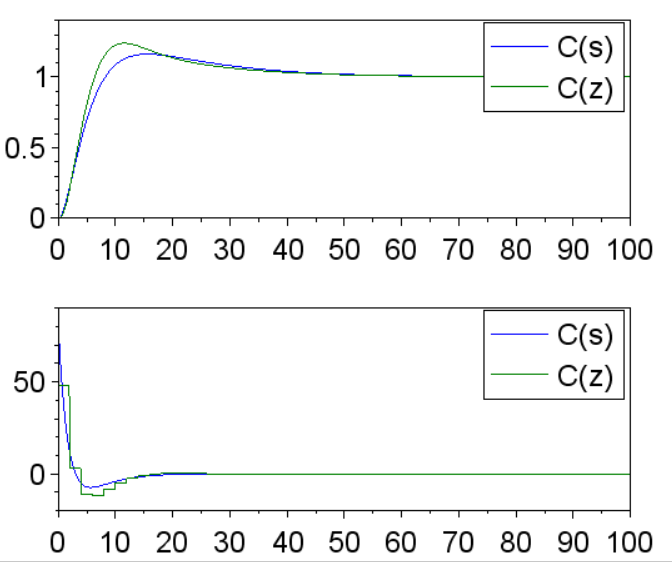
Переходные функции регуляторов:

Выводы:
Метод фиктивного квантования обеспечивает самое лучшее соответствие непрерывному регулятору, метод Эйлера – самое худшее.
При использовании метода фиктивного квантования значения в моменты квантования совпадают с переходной функцией непрерывного регулятора.
Моделирование замкнутых линейных систем
Модель Xcos:

Интервал квантования: T = 1 с
Переходные процессы:
Метод Эйлера
|
Преобразование Тастина
|
||
Фиктивное квантование
|
Интегральные квадратические ошибки |
||
|
по выходу eout |
по управлению eu |
|
метод Эйлера |
43600.273 |
46025.053 |
|
преобразование Тастина |
43600.370 |
45675.314 |
|
фиктивное квантование |
43599.518 |
46219.863 |
|
|
|||

Выводы:
Все регуляторы обеспечивают удовлетворительное качество.
Лучшим регулятором является метод Тастина.
Худшим регулятором является метод фиктивного квантования.
Моделирование замкнутых нелинейных систем
Тип нелинейностей:
Насыщение
Модель Xcos:

Интервал квантования: T = 1 с
Переходные процессы:
-
Метод Эйлера

Преобразование Тастина

Фиктивное квантование

Интегральные квадратические ошибки
по выходу
eout
по управлению
eu
метод Эйлера
43603.062
45223.043
преобразование Тастина
43602.520
45296.056
фиктивное квантование
43601.974
45333.339
Выводы:
В сравнении с линейной системой, график системы С(z) стал ступенчатым.
Все методы обеспечивают хорошее качество управления.
Метод Тастина лучший, метод Эйлера – худший.
Интервал квантования: T = 2 с
Метод Эйлера:
Ceuler(z)
=
Метод Тастина:
Ctustin(z)
=

Фиктивное квантование:
CF(z)
=

Переходные процессы:
-
Метод Эйлера

Преобразование Тастина
Фиктивное квантование

Интегральные квадратические ошибки
по выходу
eout
по управлению eu
метод Эйлера
435471.60
460309.81
преобразование Тастина
21808.057
22613.294
фиктивное квантование
21809.205
22675.291
Выводы:
Не все методы обеспечивают хорошее качество управления.
Метод Тастина лучший, метод Эйлера худший.
Для больших интервалов квантования лучше использовать метод Тастина и метод фиктивного квантования.
Оптимальный цифровой регулятор по критерию интегральной квадратической ошибки
Интервал квантования: T = 1 с
Сравнение оптимального регулятора и преобразования Тастина:
-
Оптимальный регулятор

Преобразование Тастина


eout = 0.5089443
eu = 100.45300
eout = 43602.520
eu = 45296.056
Выводы:
Регуляторы почти не отличаются.
Лучшее качество обеспечивает оптимальный регулятор
Более прост в построении регулятор Тастина.