

5 лаб - код в архиве / Lab_4_Encoder
.docxМИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра ВТ
Отчет по лабораторной работе № 4
По дисциплине «Интерфейсы периферийных устройств»
Тема: «Чтение данных с цифрового инкрементного энкодера»
Студенты гр. 6307 |
|
Кичерова А. Д. Васин А. М. |
Преподаватель |
|
Молодцов В. О. |
Санкт-Петербург
2019
Цель работы
С помощью САПР Quartus II разработать узел, осуществляющий прием данных с цифрового энкодера, подключенного к лабораторной ПЛИС.
Задание на работу
Разработать узел, осуществляющий прием данных с механического цифрового инкрементного энкодера pec16-4220f-s0024, а также устранить появление возможного дребезга при переключении положений энкодера. Проверить работу узла на учебной плате с помощью светодиодных индикаторов.
Теоретические сведения
Инкрементальный (инкрементный) энкодер (Incremental Encoder) — это импульсный датчик расчета количества импульсов от начальной метки за один оборот вращения диска для определения углового положения вала энкодера.
Данный тип энкодеров формирует последовательный импульсный цифровой код, который представляет собой информацию угла поворота вала.
Главная задача инкрементального энкодера — это расчет единичных импульсов за один цикл. Один цикл равен - одному обороту диска энкодера.
Помимо инкрементных также есть абсолютные энкодеры. Они выдают на выходе сигналы, которые можно однозначно интерпретировать как угол поворота вала датчика угла. Датчики угла этого типа не требуют привязки системы отсчёта к какому-либо нулевому положению.
По способу реализации бывают оптические, магнитные, механические.
В данной работе используется механический цифровой инкрементный энкодер Bourns pec16-4220f-s0024. Он имеет следующие характеристики:
Output – 2-bit quadrature code
Closed – Circuit Resistance 3 ohms maximum
Contact – Rating 1 mA @ 5 VDC
Insulation – Resistance 10 megohms @ 50 VDC
Dielectric – Withstanding Voltage
Sea Level – 50 VAC minimum
Electrical Travel – Continuous
Contact Bounce (15 RPM) – 5,0 ms maximum (с фильтром)
RPM (Operating) – 100 maximum
Operating Temperature Range – -30 °C to +70 °C (-22 °F to +158 °F)
Storage Temperature Range – -40 °C to +85 °C (-40 °F to +185 °F)
Vibration – 10~55~10 Hz / 1 min / Amplitude 15 mm
Shock – 100 G
Rotational Life – 100,000 cycles minimum
Switch Life – 20,000 cycles minimum
IP Rating – IP 40
Квадратурные, они же двойные, энкодеры позволяют считывать не только число поступающих импульсов, но и направление движения.
Преимущества:
простота конструкции;
практически отсутствуют ошибки во время счета импульсов;
можно определять направленность движения.
Недостатки:
во время запуска непонятно, в каком именно положении находится энкодер.
В качестве так называемой квадратуры выхода в данном виде энкодирующих устройств применяется пара выходных каналов. Они позволяют определять, в каком именно направлении происходит вращение вала.
При этом энкодеры, оборудованные всего одним выходом (на схеме обозначается литерой А), носят название тахометров.
Ход работы
Для выполнения работы выбрана САПР Quartus II и язык Verilog HDL. Для того, чтобы избавиться от дребезга был написан отдельный модуль, который принимает сигналы с энекодера и с помощью счетчика считает 5мс, согласно описанию микросхемы.
Очищенный сигнал затем проверяется на направление вращения. В зависимости от смещения сигнала B (как показано на диаграмме выше), определяется направление и происходит увеличение или уменьшение значения в регистре на один. Также если было произведено нажатие на ручку энкодера, регистр обнуляется.
Следом в планировщике контактов разряды регистра были назначены на панель светодиодных индикаторов. Очищенный и оригинальный сигналы с энкодера были назначены на выходы для проверки на осциллографе.
Левый
Правый

Чистый
Оригинальный
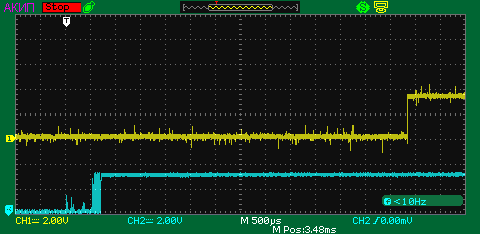
По осциллограммам видно, что дребезг оригинального сигнала устранен в обработанном сигнале.
Наблюдение работы узла на плате показало, что данные с энкодера считываются правильно, мы могли успешно управлять разрядами регистра с помощью энкодера, что было видно на светодиодных индикаторах.
Вывод: в результате работы был разработан узел, осуществляющий чтение данных с цифрового инкрементного энкодера. Полученные данные очищены от дребезга, вызванного механическими частями устройства, результаты фильтрации проверены на осциллографе. За функционированием узла проследили на светодиодных индикаторах учебной платы.