

Некоторые частные случаи определения мгновенного центра скоростей
1. Если плоскопараллельное движение осуществляется путем качения без скольжения одного цилиндрического тела по поверхности другого, причем второе тело неподвижное, то точка касания Р является мгновенным центром скоростей (рис. 10.8а).
|
|


а) б) в)
Рис. 4.8
2. Если скорости точек А и В тела параллельны друг другу, причем линия АВ не перпендикулярна к , то мгновенный центр скоростей лежит в бесконечности и скорости всех точек равны VA и параллельны ей. Следовательно, все точки тела имеют одинаковую скорость по величине и направлению, т.е. тело имеет мгновенное поступательное движение. Угловая скорость тела в этот момент равна нулю (рис. 10.8б).
3. Если скорости точек А и В тела параллельны друг другу и при этом линия АВ перпендикулярна к , то мгновенный центр скоростей Р определяется построением показанным на рис. 10.8в.
Пример 1. (16.17).
Определить скорость точки к механизма, изображенного на рис. 4.9 если известно, что ОА = 20см, АВ = ВО1, <ВАО1 = 300, угловая скорость кривошипа ОА = 2с-1. Точка к является серединой звена ВО1.
Решение
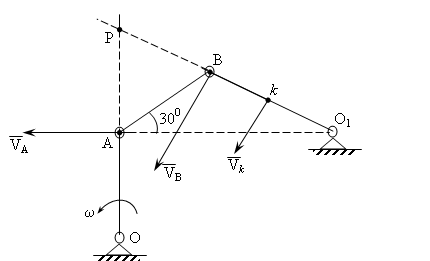
Рис. 10.9
Точка к принадлежит звену ВО1. Звено ВО1 вращается вокруг неподвижного центра О1. Поэтому направление вектора скорости в точке к будет перпендикулярно направлению звена ВО1.
Так как угловая скорость кривошипа известна, то скорость в точке А будет равна:
![]() .
.
Вектор скорости будет перпендикулярен к ОА, так как кривошип вращается вокруг неподвижного центра О.
Направление вектора скорости в точке В известно: вектор скорости будет перпендикулярен ВО1.
Точки А и В принадлежат звену АВ: в точке А известны направление и модуль скорости; в точке В известно направление вектора скорости. Поэтому можно построить мгновенный центр скоростей для звена АВ. Для этого проводим через точку А линию, перпендикулярную направлению вектора , а через точку В проведем линию, перпендикулярную направлению вектора . Точка пересечения этих линий – Р является м.ц.с. для звена АВ в данный момент времени.
Используя соотношение (10.4) получим:
![]() ,
отсюда следует, что
,
отсюда следует, что
![]() .
.
Из треугольника АРВ вследствие того, что <РАВ = 600 и <РВА = 600 следует, что данный треугольник равносторонний.
Поэтому РВ = РА, а
это значит, что
![]() ,
т.е.
,
т.е.
![]() .
.
Так как О1 – центр вращения звена ВО1, поэтому точка О1 является м.ц.с. для этого звена. Так как точка к является серединой звена ВО1, то:
![]() ,
или:
,
или:
![]() см/с.;
см/с.;
![]() см/с.
см/с.
Ответ: см/с.
Пример 2. (16.22).
Определить направления и значения скоростей точек обода колеса в положении I, II, III, IV, если колесо радиуса R = 0,5м катится без скольжения со скоростью V0 = 10 м/с (рис. 10.10).
Решение

Рис. 10.10
1. Определим скорость точки обода колеса в положении I. Так как точка МI принадлежит одновременно колесу и неподвижной плоскости, по которой это колесо перемещается, то эта точка является м.ц.с. Следовательно, ее скорость равна нулю, т.е. V1 = 0.
2. Определим скорость точки М в положении II. Определим направление скорости, для этого соединим точки МI и МII прямой линией и проведем через точку МII линию, перпендикулярную ей. Это будет направление вектора скорости в точке MII. Тогда составим соотношение (10.4):
![]() ,
отсюда
,
отсюда
![]() .
.
Отрезок MIMII
из треугольника MIOMII
равен
![]() ,
тогда
,
тогда
![]() (м/с).
(м/с).
Определим скорость точки М в положении III.
Так как точка MI является м.ц.с., то составим соотношение:
![]() ,
отсюда
,
отсюда
![]() ,
,
тогда
![]() (м/с).
(м/с).
Определим скорость точки М в положении IV.
Составим соотношение:
![]() ,
отсюда
,
отсюда
![]() (м/с);
(м/с);
![]() м/с.
м/с.
Ответ: V1
= 0,
![]() м/с,
м/с,
![]() м/с,
м/с.
м/с,
м/с.