

Лекція_5_Супутникові методи визначення координат
.pdfГеодезія та землевпорядкування, 8 семестр
Лекція 5
(частина І)
БУДОВА ТА ПРИНЦИП РОБОТИ ГЕОДЕЗИЧНИХ СУПУТНИКОВИХ СИСТЕМ
1 Принцип роботи систем визначення просторового положення точок.
2 Найважливіші відомості про будову глобальних навігаційних систем.
3 Основи теорії визначення положення пунктів глобальними супутниковими системами.
4 Абсолютні та відносні методи супутникового вимірювання.
5 Параметри орбіт супутників.
6 Загальний принцип побудови супутникових передавачів системи GPS.
7 Структурна схема геодезичного супутникового приймача.
8 Відомості про роботу системи керування та опрацювання вимірів приймачем GPS
[1, с. 322…351]
1 Принцип роботи систем визначення просторового положення точок
Більшість високоточних приладів наземної геодезії (теодоліти, нівеліри, світловіддалеміри, тахеометри та ін.) удосконалені завдяки вдалим технічним рішенням та продуманим технологіям їх використання. Проте, майже всі вони використовують оптичний діапазон електромагнітних хвиль.
Це, по-перше, створило цілий ряд недоліків, наприклад: необхідність під час вимірювання не тільки прямої (геометричної), але й оптичної видимості між пунктами; певні складності цілодобових спостережень; неможливість безперервних моніторингових спостережень та багато інших.
Другою особливістю традиційного геодезичного вимірювання є широке розповсюдження вимірювання кутів, хоча сучасні світловіддалеміри забезпечують більш високий рівень точності. Крім того, наземне вимірювання виконується в прошарках високодинамічної атмосфери, що суттєво ускладнює процедуру вимірювання і знижує потенціальний рівень точності.
Альтернативний підхід до геодезичного вимірювання на принципово іншій основі виявився в застосуванні просторових методів вимірювань із використанням миттєвого положення штучних супутників Землі як точок із відомими координатами. Засновані на такому принципі вимірювальні комплекси отримали назву глобальних систем позиціонування, початкове призначення яких було розв'язання навігаційних задач.
Проте, подальші дослідження показали, що за рахунок приладного та програмного забезпечення такі системи можуть бути використані для розв'язання широкого кола геодезичних задач та різко підвищити продуктивність та точність вимірів.
Під час вибору найбільш ефективного діапазону електромагнітних хвиль враховувалось те, що ці системи повинні забезпечити виконання вимірювання під час будь-яких погодних умов. Дослідженнями встановлено, що саме таким є ультракороткий діапазон радіохвиль.
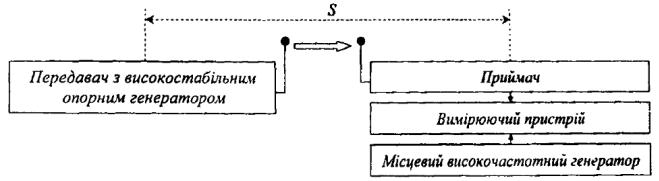
Ще одна особливість супутникових віддалемірних систем у тому, що вони повинні дати можливість одночасного забезпечення вимірювання віддалі між незначною кількістю супутників та необмеженою кількістю станцій, що знаходяться на земній поверхні. Під час створення масової портативної апаратури доцільно виключити двосторонній обмін інформацією, як це прийнято під час наземного вимірювання, тобто виключити радіопередавальні пристрої, що мали б входити до складу апаратури користувача. Ця вимога визначила необхідність застосування одностороннього методу вимірювання довжин і значно спростила будову наземних та супутникових приладів. Головна особливість одностороннього методу вимірювання у тому, що передавальний пристрій знаходиться на супутнику, а приймальний – на наземному пункті. Інформаційний сигнал проходить тільки в одному напрямку, а саме, від супутника до приймача. В основу цього методу покладена проста функціональна блок-схема (рис. 1).
Рисунок 1 – Спрощена функціональна схема віддалеміра, що працює на односторонньому принципі
З рисунка видно, що інформаційний сигнал дійсно проходить віддаль S тільки в одному напрямку. Якщо миті випромінювання та приймання даного сигналу зафіксовані точно синхронізованими годинниками, які знаходяться на супутнику та наземному пункті і які реалізуються на основі відповідних високостабільних опорних генераторів, то віддаль S може бути визначена за формулою:
S c , |
(1) |
де с - швидкість ЕМХ; τ - визначений час проходження віддалі сигналом.
Формула (1) аналогічна формулі імпульсних наземних світловіддалемірів:
S |
1 |
c . |
(2) |
|
2 |
||||
|
|
|
Множник 1/2 в формулі (1) відсутній, оскільки сигнал проходить віддаль S один раз. Оскільки ЕМХ за одну наносекунду (1нс = 1·10-9с) проходять віддаль біля 30 см, то для забезпечення сантиметрового рівня точності необхідно
2
синхронізувати годинники на супутнику та на приймачу до сотих долей наносекунди. Але існуючий рівень техніки поки-що не дозволяє цього зробити. Тому необхідно враховувати асинхронність цих годинників, що ускладнює розв'язок задачі і вимагає одночасного вимірювання віддалей від точки на поверхні Землі (координати якої визначаються) до чотирьох супутників, як мінімум. Віддалі, виміряні без урахування синхронізації годинників, називають псевдовіддалями.
Вимірювання супутникової геодезії базуються переважно на використанні глобальної позиційної системи GPS (Glоbаl Роsitioning System), що знайшла в останні роки широке застосування в усіх видах геодезичних робіт. Менш відомою є система ГЛОНАСС, запропонована Росією.
Супутникова геодезія зарекомендувала себе цілим рядом кардинальних переваг перед наземною геодезією. Найважливіші з них:
•зникла необхідність будувати зовнішні геодезичні знаки;
•з'явилася можливість об'єднати планові і висотні пункти геодезичних мереж, оскільки система GPS дає одночасно просторове положення цих пунктів;
•значно коротший час, необхідний для отримання кінцевих результатів;
•можливість більш повної автоматизації вимірювання;
•значне зменшення вартості робіт.
GPS-вимірювання використовують не тільки для визначення положення пунктів геодезичної основи, топографічного та кадастрового знімання, інженерної геодезії, але і в геодинамічних дослідженнях, для визначення таких важливих параметрів геодинаміки, як рухи полюсів нашої планети, стабільність обертових рухів Землі та інших параметрів.
Усі перелічені переваги та, особливо, висока точність GPS-вимірювання є причиною того, що «Основні положення створення державної геодезичної мережі», затверджені Постановою Кабінету міністрів України від 8 червня 1998 р. No 8441, передбачають створення нових та оновлення існуючих мереж сучасними радіонавігаційними системами (GPS) та комп'ютерними технологіями. Допускається застосування традиційних геодезичних методів. Проте, традиційні методи вже не здатні конкурувати з методами космічної геодезії. Правда, поки-що таку конкуренцію витримує високоточне геометричне нівелювання, яке, до того ж, ще необхідне для визначення геоїда.
2 Найважливіші відомості про будову глобальних навігаційних систем
Глобальна позиційна система GPS запроєктована і сконструйована Міністерством оборони США. Уряд США затратив понад 12 мільярдів доларів на створення системи і продовжує витрачати кошти на її розвиток і підтримку в робочому стані. Повна назва системи – Navigation System with Тime and Raining, Glоbаl Роsitioning System. Є скорочена назва системи – NAVSTAR/GPS. У
перекладі ця назва означає: навігаційна система часу і віддалей, глобальна система визначення місцеположення. У Радянському Союзі була створена система ГЛОНАСС (глобальна навігаційна система супутників), початкова назва проєкту «Ураган». Саме ці дві системи вже знайшли застосування в геодезії. Крім цього, Європейське співтовариство створює свою навігаційну систему
GALLILEO.
3
Оскільки GPS-система створювалась, перш за все, як військова, вона стійка, надійна і несприйнятлива до природних та штучних перешкод. До складу системи входять:
1 Навігаційні супутники;
2 Наземний комплекс керування;
3 Апаратура користувачів.
Отже, GPS поділяється на три блоки, які найчастіше називають сегментами.
Космічний сегмент. Повністю розвинений космічний сегмент спроможний забезпечити в глобальному масштабі можливість одночасного спостереження від чотирьох до восьми супутників для кутів відсікання понад 15 градусів. Якщо цей мінімальний вертикальний кут між горизонтом і напрямком на супутник зменшити до 10 градусів, тоді час від часу в полі зору знаходитиметься до 10 супутників, а за умови зменшення цього кута далі до 5 градусів кількість видимих супутників інколи може сягати 12. Для цього космічні апарати розташовуються на орбітах, близьких до кругових, з висотою над поверхнею Землі близько 20200 км та періодом обертання приблизно 12 зоряних (сидеричних) годин. Спочатку було заплановано здійснити запуск 24 супутників, які б обертались в трьох орбітальних площинах, нахилених під кутом 63° до екватора.
Пізніше, космічний сегмент був скорочений до 18 супутників, які розташовувались по три на кожній із шести орбітальних площин. Згодом довелось відмовитись від цієї скороченої конфігурації, оскільки вона не забезпечувала можливості цілодобового неперервного використання системи в будь-якій точці на поверхні Землі. Приблизно в 1986 р. кількість ШСЗ була збільшена до 21, також по три супутники на кожній із шести орбітальних площин та три запасні супутники. Запасні супутники призначені для заміни зіпсованих «неактивних» супутників. На сьогодні планується конфігурація, що складатиметься з 24 діючих супутників, розташованих на шести орбітальних площинах, нахилених до площини екватора під кутом 55°, по чотири в кожній. Крім того, для оперативної заміни ще чотири запасні супутники знаходяться на Землі. Супутники виводяться дуже точно на свої орбіти відповідно до генерального плану розгортання системи і, оскільки на висоті 20200 кілометрів атмосферне гальмування практично відсутнє, залишаються на них протягом тривалого часу. Орбіти відомі заздалегідь, а кожний приймач містить в пам'яті свого комп'ютера «альманах», тобто, своєрідний довідник, що постійно оновляється, з якого видно, де буде знаходитися кожний супутник в будь-який момент часу.
Космічні апарати GPS фактично служать платформами для встановлення транссенсорів (приймачів-передавачів), атомного годинника, комп'ютера та іншого устаткування, необхідного для роботи системи. Це електронне обладнання дає користувачу можливість своїм приймачем вимірювати відстань до супутника. Крім того, кожен спостерігач, завдяки інформаційному повідомленню про орбіти, яке кодується в сигналі із супутника, спроможний визначити просторові координати рs супутника у довільний момент часу. Спираючись на ці дві можливості та на метод просторових засічок, користувачі можуть визначити свої координати на поверхні або поблизу Землі.
4
Допоміжне обладнання кожного супутника складається із двох сонячних батарей площею 7м2, які забезпечують електричне живлення, та системи реактивних двигунів, потрібних для корекції орбіти та керування орієнтацією космічного апарата в просторі.
Супутники мають різноманітні системи ідентифікації, а саме: за номером запуску, за присвоєним кожному апарату окремим псевдошумовим кодом (РRN), за номером позиції на орбіті, за номером у каталозі НАСА, за міжнародною класифікацією. Для того, щоб уникнути можливих непорозумінь та зберегти відповідність із змістом навігаційного повідомлення із супутника, ми використовуємо, як правило, номер РRN.
На теперішній час створено п'ять типів супутників GPS, їх розділяють на класи: Вlоск І, Вlоск II, Вlоск ІІА, Вlоск ІІR та Вlоск ІІF. Конфігурація супутників типу Вlоск І дещо відрізняється від конфігурації супутників Вlоск II, оскільки кут нахилу їх орбітальної площини до екваторіальної дорівнює 55°, тоді як до попереднього покоління він становив 63°. Крім кута нахилу орбіти існує ще одна суттєва відмінність між супутниками Вlоск І та Вlоск II, пов'язана з національною безпекою США. Сигнали супутників Вlоск І могли вільно реєструватись цивільними користувачами, а доступ до інформації з ШСЗ наступного покоління Вlоск II став обмеженим.
Супутники типу Вlоск II були призначені для забезпечення першої версії повної уніфікованої системи GPS (тобто 21 активного та трьох запасних супутників). Перший із супутників типу Вlоск II коштував приблизно 50 млн. доларів США і важив більше 1500 кг. Його запуск здійснено 14 лютого 1989 р за допомогою ракети «Дельта II», яка стартувала з космодрому ім. Кеннеді, що на мисі Канаверал у штаті Флорида. На сьогодні середня тривалість функціональної здатності супутників цього типу становить шість років, хоча метою проєкту було досягти семи з половиною років. Деякі із супутників можуть справно працювати навіть до десяти років, тому що їх основні модулі функціонують протягом такого часу.
Супутники наступного покоління, які названо Вlоск ІІF (від слова follow оn
– наступний), запускались у період з 2001 по 2010 р. Ці супутники обладнуються удосконаленим устаткуванням для автономної навігації, наприклад, інерціальними системами навігації.
Планується збільшити термін роботи супутника Вlоск ІІF до 14…15 років, а також увести в склад сигналів додаткову частоту L5, яка рівна 1176,45 МГц, що суттєво полегшить розв'язок неоднозначності, характерної для фазового вимірювання.
Розгортання Російської системи ГЛОНАСС також проходить поетапно. Перший супутник системи (із назвою Космос 1413) був запущений 12 жовтня 1982 р. До кінця 1998 р. було запущено 74 супутники, більшість з яких уже виведені з експлуатації. У лютому 2000 р. залишилось 8 супутників.
За проєктними даними сузір'я супутників ГЛОНАСС також має включати 24 супутники, розташованих на трьох орбітальних площинах, нахил яких відносно до площини екватора рівний 64,8°. Номінальна висота кругової орбіти над земною поверхнею складає 19100 км, період обертання навколо Землі 11 год 15 хв 44 с. Загальна маса супутника 1415 кг. Планується підвищити стабільність частоти генераторів, підвищити точність визначення ефемерид супутників та їх
5
прогноз, а також збільшити термін функціонування супутників. Проєкт запуску 24 супутників системи ГЛОНАСС здійснено в Росії важкими ракетами «Протон».
Технічні параметри системи NAVSTAR/GPS та ГЛОНАСС є різними. Істотною різницею цих систем є те, що в системі GPS усі супутники випромінюють коливання однакових частот, а в системі ГЛОНАСС кожен супутник випромінює свою частоту. Вивчається можливість одночасного використання обох систем для визначення положення наземних пунктів. Такі дослідження дуже важливі, оскільки дозволять використати для визначення пунктів більшу кількість супутників (в обох системах понад сорок ШСЗ), не кажучи вже про те, що сигнали ГЛОНАСС не спотворюються і тому ця система дає можливість отримувати більш високу точність.
Країни Європейського Союзу планують створити свою, незалежну від США, глобальну навігаційну систему.
У США, для заміни супутників, які припинили своє функціонування, починаючи з 1995 р. виводять на орбіти нові супутники кораблями «Шатл». Хронометрами (основними генераторами) таких супутників є водневі лазери, стабілізація частот яких на порядок вища, від генераторів попередніх супутників, і становить 10-13. До того ж ці супутники мають засоби міжсупутникового зв'язку, які, завдяки обміну даними між супутниками та вимірюванню віддалей між ними, проводять автономне уточнення параметрів орбіт та автономну синхронізацію годинників.
Передавачі всіх супутників безперервно випромінюють коливання двох частот. Частоти модельовані кодами. Крім вимірювальних сигналів, передавачі передають інформацію про свою орбіту, а також про стан інших супутників системи і параметри їх орбіт. Супутники мають також приймачі, які приймають сигнали від основної станції сегменту керування. Ці сигнали містять інформацію про орбіту супутників. Траєкторії супутників можна коректувати з основної наземної станції керування.
Сегмент керування. Сегмент являє собою мережу наземних станцій спостереження за ШСЗ і центрів обробки інформації. Головним завданням сегменту є стеження за супутниками з метою визначення траєкторій ШСЗ та похибок годинників на їх борту. Крім того, через систему керування здійснюється синхронізація годинників та оновлення даних.
Цей сегмент складається з:
•головного центра керування МСS (Маsteг Сопtrоl Stаtіоn), що знаходиться в місті Соlоrаdо Sрrіngs;
•основної станції керування GPS (Ground Control Station), що розташована на Гавайськнх островах;
•трьох стаціонарних станцій контролю (Моnіtоr Stаtіоn). Вони знаходяться на островах Вознесіння (Аsсеnsіоn) в північній частині Атлантичного океану, Дієго-Гарсія в Індійському океані та Кваджалейн в північній частині Тихого океану;
•рухомих контрольних станцій.
Станції сегменту керування знаходяться на великих віддалях між собою. Вони безперервно приймають коливання, які випромінюють супутники, що знаходяться в одній півкулі зі станцією. Віддалі від станцій до супутників
6
визначають через півтори секундні інтервали часу. Віддалі усереднюються для інтервалів часу 15хв. Крім того, на станціях керування виконуються метеорологічні зондування атмосфери по вертикалі з метою визначення поправок за тропосферу. Результати опрацювання сигналів супутників та вертикального зондування із контрольних станцій передаються до головного центру керування. Тут обчислюють ефемериди орбіт супутників та рівняння їх хронометрів (генераторів ШСЗ) на 12 годин наперед. Ці дані передаються на ШСЗ, а вони, у свою чергу, пересилають їх користувачам, точніше – на наземні приймачі користувачів системою GPS. Військово-картографічному агентству США підпорядковано ще п'ять станцій стеження, дані яких використовують для обчислення високоточних ефемерид супутників. Крім перелічених станцій на планеті Земля ще працюють приватні станції стеження за ШСЗ. Ці станції не керують роботою супутників, а виконують уточнення параметрів їх орбіт та рівнянь хронометрів (генераторів) супутників.
Сегмент користувача. Це власники приймачів сигналів ШСЗ, програмного забезпечення та комп'ютерів. Кількість приймачів системи є необмеженою, оскільки вони пасивні.
Для геодезичних вимірювань кожний споживач повинен мати мінімум два приймачі з антенами, комп'ютер та програмне забезпечення для відповідних геодезичних робіт.
Приймачі, які використовують геодезисти, виготовляє декілька фірм. Найвідоміші з них: Тrіmblе, Аshtесh (США), Lеіса (Швейцарія), Sеrсеl (Франція), Sоkіа (Японія). Кожна з фірм виготовляє декілька моделей, різних за точністю та ціною. Усі приймачі за кількістю частот, на яких вони здатні працювати, поділяють на дві великі групи:
•одночастотні;
•двочастотні.
З назв цих приймачів зрозуміло, що перші приймають від супутників тільки одну частоту, а другі – дві частоти. Останні дають більшу точність, тому, що приймання двох частот дозволяє враховувати вплив іоносфери.
Будова приймачів, методика спостережень та опрацювання результатів спостережень весь час удосконалюється, а точність визначення положення пунктів на поверхні Землі підвищується. Найточніші способи визначення положення спочатку були призначені тільки для військових цілей.
Сегмент користувача являє собою множину GPS-приймачів. За способом вимірювання віддалей GPS-приймачі радіосигналів із супутника можна розділити на такі групи:
1)С/А-кодові з використанням псевдовіддалей;
2)С/А-кодові з вимірюванням фази передавальної хвилі;
3)Р-кодові з вимірюванням фази передавальної хвилі;
4)У-кодові з вимірюванням фази передавальної хвилі.
За великої різноманітності приймачів на сучасному ринку доцільно описати їх основні типи, а також принципи побудови, переваги і недоліки.
За можливостями одночасного приймання сигналів приймачі можна також розділити на дві великі групи.
У першій будуть приймачі, які працюють за принципом послідовного, тобто, почергового стеження за супутниками робочого сузір'я.
7
У другій – ті, які відстежують 4 або більше супутників одночасно, тобто паралельно. Усередині кожної із цих груп існує велика різноманітність приймачів різного призначення.
Одночастотні приймачі з малим енергоспоживанням. Ці пристрої проєктуються як портативні і тому, зазвичай, працюють на батарейках. Для обмеження споживання енергії вони виконують визначення координат один раз на хвилину, і потім самостійно вимикаються до наступного визначення.
Для індивідуального використання туристами або під час плавання на невеликих суднах такі приймачі є найкращим компасом, їх точність в більшості випадків вища, ніж точність системи Lоrаn, і працюють вони в будь-якій точці Земної кулі.
Їх основні недоліки – це низька, в порівнянні з іншими приймачами, точність, обмежені інтерфейсні можливості і грубе вимірювання швидкості руху.
Одночастотні приймачі. Ці пристрої також використовують один канал для вимірювання віддалей до всіх супутників робочого сузір'я, але вони не обмежені по енергоспоживанню. Звичайний одноканальний приймач може залишатися включеним постійно і, отже, бути більш точним, а також вимірювати швидкість із достатньою точністю принаймні доти, поки немає значних прискорень або різких змін курсу. Оскільки єдиний канал використовується і для прийому сигналів декількох супутників, і для обчислень віддалей, такі приймачі не можуть застосовуватися для безперервного визначення місцеположення.
Швидкодіючі мультиплексні олночастотні приймачі. Цей варіант дуже подібний до варіанта звичайних одночастотних приймачів, але в них перемикання від супутника до супутника відбувається набагато швидше. Настільки, що виявляється можливим, практично одночасно, і виконувати вимірювання віддалей, і стежити за сигналами супутників, тобто, працювати в безперервному режимі. Приймачі, побудовані згідно цього варіанта, менш чутливі до неточності ходу годинника.
Двочастотні приймачі послідовного типу. Наявність другого каналу значно розширює можливості GPS-приймача. По-перше, вдвічі покращується відношення сигнал/шум системи. У свою чергу це означає, що з'являється можливість уловлювати супутникові сигнали під час більш несприятливих умов, і відстежувати супутники, що знаходяться ближче до горизонту. Оскільки один канал може бути використаний тільки для опрацювання інформації про координати положення, а другий – тільки для пошуку і приймання сигналів чергового супутника, двоканальний приймач не перериває вимірювань і обчислень.
Самі визначення координат і швидкості можуть бути більш точними, оскільки в хорошому двоканальному приймачі використовуються обчислювальні алгоритми, що виключають вплив неточності ходу його годинника.
Недоліком двоканального варіанта є те, що його використання може бути більш дорогим і приймач буде споживати велику потужність.
Приймачі паралельного (безперервного) стеження. Приймачі, які відстежують 4 або більше супутників одночасно, можуть відображати миттєве положення і швидкість. Це є дуже цінним під час застосування на високодинамічних об'єктах і під час високоточних вимірювань. Ці пристрої часто
8
використовуються в геодезії і для наукових цілей. Вони можуть мати від 4-х до 10,12 і навіть до 24-х каналів стеження.
Крім очевидної переваги – безперервного вимірювання координат положення і швидкості, ці багатоканальні приймачі можуть також спростити проблему з GDОР. Замість того, щоб виконувати обчислення на основі сигналів чотирьох найкращим чином розташованих супутників, деякі із цих систем обробляють спільно сигнали всіх видимих в даний момент супутників. Застосування до цієї надлишкової інформації відповідних алгоритмів обробки дозволяє мінімізувати помилки визначення місцеположення GDОР.
Для 4-канального приймача відношення сигнал/шум в два рази вище, ніж для двоканального, і в чотири рази вище, ніж для одноканального. Крім того, проводячи взаємну відносну синхронізацію каналів, можна усунути будь-які міжканальні тимчасові зсуви, які могли б вплинути на точність визначення місцеположення.
Недоліком цього типу систем є збільшення їх розмірів, вартості і споживаної потужності.
Сучасні, більш довершені приймачі, обробляючи основні супутникові дані складними методами, видають значно більшу кількість інформації і представляють її більш наочним відображенням на дисплеях із високою роздільною здатністю, наприклад, накладаючи на електронні цифрові карти.
Таким чином, хоча усі приймачі і сприймають одні і ті ж дані GPS, використовують вони їх по-різному.
3 Основи теорії визначення положення пунктів глобальними супутниковими системами
Успішний запуск перших штучних супутників Землі та спостереження за супутниками виявили високу стабільність параметрів орбіт супутників, що дає можливість досить точно обчислити положення супутника на будь-який момент часу.
Саме цей факт підштовхнув вчених до незвичайної, революційної ідеї: використати штучні супутники як носії вихідних координат, за якими визначаються положення точок на поверхні Землі.
До цього часу було навпаки, такими носіями відомих (вихідних) координат служили тільки пункти, жорстко закріплені на землі або на спорудах, жорстко скріплених із земною поверхнею, а положення супутників визначалось системою координат із початком на поверхні Землі або в центрі її мас.
Якщо згадати, що планета Земля також перебуває в безперервному русі в космічному просторі, то ідея передачі функції носіїв координат супутником стає правомірною.
Ідея передачі ролі носіїв координат супутникам докорінно змінила засади космічної геодезії. Виходячи із цієї ідеї, названої революційною, положення пунктів на земній поверхні відносно рухомих супутників можна визначити методами просторових кутових або лінійних засічок. Тому потрібно точно знати моменти часу, в які виконуються вимірювання. Тільки конкретний момент часу положення супутників є однозначним. Тому однозначним в цю мить є і положення наземних пунктів відносно супутників.
9
GPS-визначення базуються на вимірюванні відстані від супутникового приймача, розташованого на поверхні Землі, до супутника. ШСЗ безперервно випромінюють радіохвилі. Приймачі, встановлені на земній поверхні, приймають ці коливання і вимірюють такі параметри, які дозволяють однозначно визначити напрямки на супутники або віддалі до них. Проте, віддалі вимірюються точніше, тому сучасні супутникові системи є віддалемірними. При цьому вимірювання віддалей виконується одночасно кодовим та фазовим методами.
Кодові визначення. У процесі вимірювань за допомогою супутникових систем на передавальному кінці вимірюваної лінії (на супутнику) формується відповідний кодовий сигнал, а на приймальному кінці лінії (в наземному приймачі) має бути сформований опорний сигнал відклику, який обов'язково є аналогічним кодовому сигналу. Ці коди в передавальному та приймальному пристроях мають бути створені синхронно.
Код, що із сигналами супутника досягає приймача, є зсунутим в часі відносно коду, створеного приймачем. Це так звана репліка коду. Цей зсув вим є
мірою часу, за який сигнал зі супутника досягає антени приймача і є пропорційним віддалі супутник – Земля. У приймачі проходить порівняння двох кодів, а точніше, виконується кореляційний аналіз, на основі якого визначається
проходження сигналу від супутника до приймача.
Знаючи вим , можна знайти виміряну довжину Sвим |
за формулою |
S c вим . |
(3) |
Проте, формула (3) потребує уточнення. Справа в тому, що супутник і наземний приймач повинні створювати коди в еталонний для GPS-системи час. Позначимо зсув показу годинника передавача (супутника) відносно еталонного
часу tпер , а відповідний зсув показу годинника приймача tпр . Зареєстрований час розповсюдження ЕМХ може бути описано таким співвідношенням:
|
вим |
t |
пр |
|
tпр |
t |
пер |
|
tпер |
|
іст |
|
, |
(4) |
|
|
|
|
|
|
|
|
|
де вим - час проходження сигналу за годинниками передавача та приймача;
tпер та tпр - моменти часу випромінювання та приймання інформаційного сигналу відносно показу еталонного годинника GPS;
τіст = tпр – tпер - істинний час проходження сигналом віддалі;
tпр tпер - поправка, викликана несинхронністю ходу годинників на супутнику та наземному приймачі. Якщо ми будемо користуватись виміряним
часом вим , тоді значення виміряної віддалі Sвим |
визначиться з виразу |
|
||||||||
S |
вим |
c |
вим |
c |
іст |
|
S |
c |
, |
(5) |
|
|
|
|
іст |
|
|
|
|||
де Sіст - геометрична (істинна) віддаль, яка нас цікавить, дійсна віддаль між супутником та приймачем. Цю віддаль Sіст ми зможемо визначити тільки тоді, якщо будемо знати - несинхронність ходу годинників на супутнику та приймальній станції.
10