

Конспект до теми 4. (Космічний сегмент ГНСС)
.pdf1. ГЛОБАЛЬНІ НАВІГАЦІЙНІ СУПУТНИКОВІ СИСТЕМИ
Глобальна навігаційна супутникова система (ГНСС) - це система, що дозволяє визначати просторове положення об'єктів місцевості шляхом опрацювання ГНСС-приймачем прийнятого супутникового сигналу.
В даний час існує декілька ГНСС, а саме: глобальні - GPS (США),
ГЛОНАСС (Російська Федерація), Galileo (Європейський Союз) та Beidou (Китайська народна Республіка) та регіональні QZSS (Японія), NavIC (Індія).
Проте повноцінними та завершеними прийнято вважати тільки системи GPS та ГЛОНАСС.
Глобальна система визначення місцеположення GPS, відома також як
Navstar (Navigaion System with Time and Ranging - навігаційна система визначення часу і місцеположення), призначена для передачі навігаційних сигналів, що можуть одночасно прийматися у всіх регіонах світу. Система була розроблена за замовленням Міністерства оборони США. Перше сузір’я GPS –
супутників розгорталось з червня 1989 р. по березень 1994 р.: на орбіту були виведені 24 супутники блоку КА II. Остаточне введення системи GPS в
експлуатацію відбулось в 1995 р. Експлуатація й обслуговування системи здійснюються Міністерством оборони США. Система використовується в усьому світі для рішення військових і цивільних навігаційних задач.
Російська супутникова навігаційна система аналогічного призначення,
відома за назвою ГЛОНАСС (Глобальна навігаційна супутникова система)
розроблялася за замовленням Міністерства оборони колишнього СРСР, але зараз застосовується для надання навігаційних послуг різним категоріям споживачів. Сузір’я супутників системи ГЛОНАСС було розгорнуто на початку
90-х рр.
Системи GPS і ГЛОНАСС мають подібну архітектуру та принципи дії. У
навколоземному просторі на висоті 20000 км розгорнута мережа ШСЗ, орбіти і місцеположення ШСЗ на них рівномірно покриває усю планету. При цьому у будь-який момент часу у будь-якій точці земної поверхні чи морських акваторій (якщо відсутні перешкоди видимості ШСЗ) є пряма видимість
1

мінімум до чотирьох ШСЗ. Реально протягом доби кількість видимих GPS
супутників у різних регіонах світу змінюється у межах від 5 до 12. Орбіти і координати ШСЗ безперервно визначаються з високою точністю бортовими комп’ютерами ШСЗ. Радіопередавачі ШСЗ безперервно передають сигнали в напрямку Землі. Ці сигнали несуть інформацію про миттєві координати ШСЗ і час виходу сигналу із антени ШСЗ. Сигнали надіслані від різних супутників одночасно приймаються відповідними приймачами, що розташовані на земній поверхні у точках із шуканими координатами. Приймачі фіксують час приходу сигналу на антену приймача і використовуючи швидкість поширення радіосигналів у просторі визначають миттєву віддаль до супутника. Знайшовши одночасні миттєві віддалі до чотирьох ШСЗ і використовуючи їх миттєві координати розв’язується пряма просторова засічка з якої находяться геоцентричні координати пункту спостережень і точний час.
Всі ГНСС класично складаються із: космічного сегменту, сегменту управління та контролю, а також сегменту користувачів (рис. 6).
Рис. 6. Структура ГНСС
2
1.1.Космічний сегмент
Космічний сегмент являє собою сузір'я супутників, які рухаються по навколоземних орбітах. Для забезпечення можливості одночасних спосте-
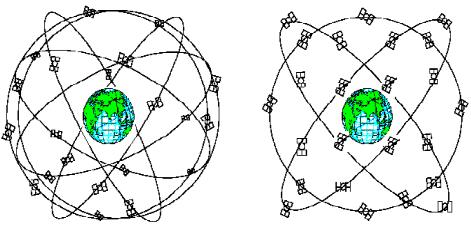
режень не менше 4-х супутників в будь-якій точці Земної кулі необхідно, щоб загальна кількість супутників у сузір'ї становила неменше 24. Для мінімізації впливу геометрії розташування видимих супутників на точність вимірювань кількість орбіт і місця розташування на них супутників повинні забезпечувати їх рівномірний розподіл на небосхилі (рис. 7). В результаті система GPS
використовує шість близьких до кругових орбіт, площини яких зміщені одна відносно одної на 60°. При цьому для кожної сусідньої орбітальної площини положення супутників зміщене приблизно на 40°. Система ГЛОНАСС використовує три орбітальні площини, рознесених на 120°, на яких розміщуються по 8 супутників, віддалених один від одного на 45°. Система
GALILEO скрадатиметься із 30 супутників (3 з яких будуть активними резервними). Вони будуть розміщені на висоті 23,616 км, забезпечуючи широку зону охоплення. Супутники будуть рівномірно розподілені на трьох орбітах, що мають кут в 56° до екватора і період 14 годин 5 хвилин.
GPS ГЛОГАСС
Рис. 7. Орбіти GPS та ГЛОНАСС
Супутники, які входять до складу систем позиціонування являють собою платформи, на яких встановлюється вся необхідна апаратура для забезпечення роботи навігаційної систем, а також для нормального функціонування кожного супутника як космічного об'єкта. Конструктивно супутник складається із
3
основного корпусу, всередині якого розміщується весь комплекс апаратури, і
двох досить великих за розмірами панелей з сонячними джерелами живлення.
Усередині корпусу крім основної радіотехнічної апаратури, що бере участь у вимірювальному процесі, є реактивний двигун з достатньою кількість палива для того, щоб була можливість коригувати орбітальне положення супутника протягом всього запланованого терміну служби. Для орієнтування супутника в навколишньому просторі передбачена інерційна система. Безперебійне електроживлення бортової апаратури здійснюється від сонячних джерел живлення і від працюючих в буферному режимі акумуляторних батарей. До складу допоміжного устаткування входить також радіоприймальний пристрій для прийому інформації, що передається із Землі сегментом управління і контролю. Основні параметри космічних сегментів систем GPS і ГЛОНАСС представлені у таблиці 1.
Таблиця 1.
Основні характеристики супутникових навігаційних систем GPS і
ГЛОНАСС
Показник |
GPS |
ГЛОНАСС |
|
|
|
|
|
Число космічної апаратури у повному |
24/3 |
24 /3 |
|
орбітальному угрупуванні |
|||
|
|
||
|
|
|
|
Число орбітальних площин |
6 |
3 |
|
|
|
|
|
Число космічної апаратури на кожній площині |
4 |
8 |
|
|
|
|
|
Нахил орбіти |
55.0° |
64.8° |
|
|
|
|
|
Висота орбіти, км |
20 180 |
19 130 |
|
|
|
|
|
Період обернення супутника |
11г. 58хв. 00с. |
11г. 15хв. 44с. |
|
|
|
|
|
Система координат |
WGS-84 |
ПЗ-90 |
|
|
|
|
|
Вага навігаційної космічної апаратури, кг |
1055 |
1450 |
|
|
|
|
|
Термін активного існування на орбіті, років |
7.5 |
3-10 |
|
|
|
|
|
Засоби виведення КА на орбіту |
Delta-2 |
«Протон- |
|
К/ДМ» |
|||
|
|
||
|
|
|
|
На початковій стадії розробки систем GPS і ГЛОНАСС планувались як |
|||
4

навігаційні системи військового призначення. Тому основну увагу було приділена формуванню кодових сигналів, за допомогою яких передбачалося реалізувати можливість оперативного визначення відстаней між супутниками і наземною апаратурою з точністю в десятки і сотні метрів. Під час проектування таких систем було визнано доцільним застосування двох видів закодованих сигналів. Для системи GPS ці сигнали отримали назву загальнодоступного грубого коду (С/А-коду) з роздільною здатністю в декілька десятків метрів і обмеженого точного коду (Р-коду) з роздільною здатністю приблизно в 10 разів вищою. В системі ГЛОНАСС такі кодові сигнали отримали назву вузько смугової і широко смугової псевдовипадкової послідовності (СТ-код і ВТ-код).
Передача з супутника обох сигналів здійснюється за допомогою модуляції несучих коливань дециметрового діапазону. Поряд із перерахованими функціями, розташована на супутнику апаратура повинна також передавати на Землю навігаційне повідомлення. Всі несучі та кодові сигнали, які формуються на супутнику, а також бінарні сигнали для передачі навігаційного повідомлення отримуються на основі використання встановлених на супутнику високо стабільних опорних генераторів. На заключній стадії сформовані сигнали об’єднуються і після відповідного підсилення випромінюються системою в напрямку земної поверхні.
Рис. 8. Структурна схема формування сингалу ГНСС
5

Основою даної функціональної схеми є високо стабільний опорний генератор, який називають також бортовим еталоном часу і частоти. Частота вироблена таким генератором коливань становить для GPS – 10,23 МГц, а для ГЛОНАСС – 5,11 МГц. На базі використання цього генератора формуються не тільки всі передані із супутника сигнали, але і реалізуються високоточні електронні годинники, покази яких використовуються в процесі виконання супутникових вимірювань, а також для передачі сигналів точного часу. В
системі GPS коливання несучих частот, які отримали умовні позначення L1 і L2, формуються за допомогою множення частоти опорного генератора відповідно на 154 і на 120. Отримані при цьому частоти  i
i
 відповідають дециметровому діапазону
відповідають дециметровому діапазону  i
i
 .
.
В системі ГЛОНАСС за допомогою відповідних синтезаторів частот для кожного супутника формується своя пара несучих частот, одна з яких відноситься до верхнього (L1), а інша – до нижнього (L2) діапазонів частот.
При цьому для верхнього і нижнього діапазонів несучі частоти, характерні для кожного супутника, визначаються за формулами:
,
(1)
 ,.
,.
де,  ,
,  ;
;  =1246,00 МГц;
=1246,00 МГц;
 , а
, а  – умовний порядковий номер пари несучих частот
– умовний порядковий номер пари несучих частот
 .
.
Несучі коливання в розглянутих системах використовуються не тільки в якості передавачів інформації з супутників в наземну апаратуру, але і є основними сигналами при виконанні фазових вимірювань, за допомогою яких вдається визначати відстані між супутником і наземним пунктом з характерною для геодезії високою точністю. Сформовані на супутнику кодові сигнали призначені, насамперед, для оперативного вимірювання відстаней на низькому рівні точності, достатньому для вирішення навігаційних завдань. Стосовно системи GPS ці сигнали використовуються для розпізнавання конкретного
6
номера супутника, захоплення його сигналу і утримання його протягом всього сеансу спостережень.
Чисельні значення характерних для кодових сигналів тактових частот,
одержуваних на основі використання частоти опорного генератора, в системі
GPS обрані наступними:  МГц та
МГц та  МГц. В
МГц. В
системі ГЛОНАСС тактові частоти для СТ-коду і ВТ-коду відповідно:
 МГц та
МГц та  МГц. Інформація, що міститься в навігаційному повідомленні, передається на більш низькій частоті (
МГц. Інформація, що міститься в навігаційному повідомленні, передається на більш низькій частоті ( 50 біт/с), при формуванні якої також використовуються коливання опорного генератора.
50 біт/с), при формуванні якої також використовуються коливання опорного генератора.
Поступленні з виходів кодуючих пристроїв кодові послідовності (сигнали С/А-коду і Р-коду) сумуються з сигналами навігаційного повідомлення, після чого вони надходять в модулятори (перемножувачі), де здійснюється фазова модуляція несучих коливань L1 і L2. При цьому коливання L1 піддаються модуляції кодовими сигналами як С/А-коду, так і Р-коду, в той час як коливання L2 модулюються тільки сигналами Р-коду з накладеним на них навігаційним повідомленням. Для полегшення поділу на приймачі кодових сигналів (С/А і Р-коду), переданих на частоті L1, несучі коливання для передачі С/А-коду, додатково зсуваються по фазі на 90 градусів, що дозволяє реалізувати в апаратурі користувача так званий квадратурний принцип поділу прийнятих сигналів. Після формування на супутнику фазомодульованих сигналів несучої частоти останні об'єднуються за допомогою відповідних електронних вузлів в один комплексний сигнал, який випромінюється супутниковою антеною системою.
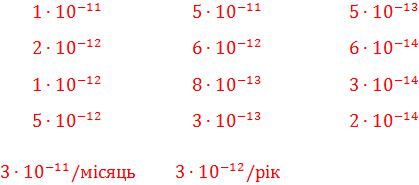
В системах GPS і ГЛОНАСС застосовуються найбільш стабільні атомні і молекулярні генератори. До них відносяться рубідієві і цезієві атомні генератори, а також водневі молекулярні генератори (мазери). У табл. 2
наведені деякі кількісні показники, що характеризують властиву цим генераторам відносну нестабільність частоти для різних часових інтервалів.
7
Таблиця 2.
Основні характеристики нестабільності частоти для різних типів
генераторів систем GPS і ГЛОНАСС
Характеристика |
|
Тип генератора |
|
|
|
|
|
||
Рубідієвий |
Цезієвий |
Водневий |
||
|
||||
|
|
|
|
|
Маса, кг |
2 |
10 |
30 |
|
|
|
|
|
|
Енергоспоживання, |
10 |
20 |
30 |
|
Вт |
||||
|
|
|
||
|
|
|
|
|
Об’єм, куб. дм. |
1 |
10 |
30 |
|
|
|
|
|
|
|
Відносна нестабільність частоти за: |
|
||
|
|
|
|
|
1 с. |
|
|
|
|
|
|
|
|
|
1 хв. |
|
|
|
|
|
|
|
|
|
1 год. |
|
|
|
|
|
|
|
|
|
1 доба |
|
|
|
|
|
|
|
|
|
Систематичний |
|
|
Не виявлено |
|
дрейф |
|
|
||
|
|
|
||
|
|
|
|
|
Причини зниження |
Погіршення |
Шуми у |
Обмежений |
|
стабільності |
якості лампи |
променевій трубці |
запас водню |
|
|
|
|
|
|
З табл. 2. випливає, що найбільша стабільність частоти характерна для водневих мазерів. Що стосується двох інших типів атомних генераторів, то цезієві генератори в порівнянні з рубідієвими забезпечують більш високу довготривалу стабільність, у той час як для рубідієвих генераторів властива найбільш висока короткочасна стабільність. Для підвищення надійності та стабільності роботи на супутниках встановлюють декілька одночасно працюючих опорних генераторів. Так, в системі GPS на супутниках Блок-II
знаходяться два цезієвих і два рубідієвих генератора. На супутниках Блок-II R -
більш стабільні водневі мазери. Оскільки на супутниках опорні генератори виконують роль бортових еталонів не тільки частоти, але і часу, то в спеціалізованій літературі такі генератори часто називають годинниками.
8