

1. Назначение и классификация РТС. Канал связи и радиолокационный канал
Радиотехническая система (РТС) – совокупность устройств, обеспечивающих выполнение конкретных относительно самостоятельных задач с использованием радиосигналов.
Область применения РТС: телевидение, радиолокация, радиоуправление, радионавигация, реализация методов измерения в различных отраслях (биологии, медицине, геологии и др.).
Особенности радиотехнических систем:
1. Целостность – наличие у системы единого функционального назначения. При этом свойства системы нельзя свести к сумме свойств составляющих ее частей.
2. Иерархичность – часть системы может рассматриваться как система более низкого уровня, в свою очередь сама система может быть частью более сложной системы.
3. Сложность – наличие сложных взаимосвязей между различными переменными , описывающими систему.
4. Случайность – влияние на характер функционирования множества внутренних и внешних случайных факторов.
5. Автоматизация – широкое использование в структуре РТС вычислительных средств различного уровня и назначения.
Классификация радиотехнических систем
1. Системы передачи информации – системы связи (многоканальная радиосвязь, радиорелейная связь, связь через искусственные спутники Земли, мобильная радиосвязь), радиовещание и телевидение, телеметрия, передача команд.
2. Системы извлечения информации: осуществляют извлечение информации из сигналов, излученных в направлении на объект и отраженных от него (радиолокация, радионавигация), из сигналов других радиотехнических систем (радиоизмерение, радиоразведка), из собственных радиоизлучений различных объектов (пассивная радиоастрономия).
3. Системы радиоуправления: обеспечивают управление различными объектами или процессами с помощью радиосигналов (радиоуправление ракетами, радиоуправление космическими аппаратами).
4. Системы разрушения информации: служат для создания помех нормальной работе конкурирующей радиосистемы путем излучения мешающего сигнала или путем переизлучения сигнала подавляемой радиосистемы после умышленного искажения.
Канал связи — система технических средств и среда распространения сигналов для односторонней передачи данных (информации) от отправителя (источника) к получателю (приёмнику).
Радиолокационный канал включает в себя: радиолокационную станцию (РЛС), носитель РЛС, среду распространения радиоволн, группу объектов (цели, ориентиры, помехи), систему навигации и систему индикации и управления каналом. Все эти элементы структуры участвуют в процессе обнаружения и определения характеристик заданных объектов.
2. Элементы общей задачи приема. Частные задачи приема
Элементы общей задачи приёма
Задача приёма сигналов состоит в наилучшем воспроизведении информации, заключённой в сигнале искажённом помехами. Оптимизация приёма сводится к следующему. По заранее известным (априорным) некоторым характеристикам передаваемого сигнала, канала и помех, зная их функциональное взаимодействие, необходимо получить оптимальное приёмное или решающее устройство, наилучшим образом воспроизводящее переданное сообщение. Точность и простота решения задачи зависят от объёма априорных сведений.
Элементы общей теории приема сигналов:
1. Событие (event) – e
2. Сигнал (signal) – s
3. Наблюдение – y=n+s (noise)
4. Решение (decision) – d
Частные задачи приема сигналов: обнаружение – установление факта наличия сигнала при приеме. Выдвигаем две гипотезы:
Н0 – сигнала нет, т.е y=n
H1 – в шуме есть сигнал, т.е y=n+s
|
H0 |
H1 |
d0 |
ПО – правильное необнаружение |
ПР – пропуск сигнала |
d1 |
ЛТ – ложная тревога |
ПО – правильное обнаружение |
M – модель – описание гипотез при помощи формул
K – критерий обнаружения (качество обнаружения)
F=P(d1/H0) – ошибка первого рода (ложная тревога)
D= P(d1/H1) – обнаружение
1) Обнаружение сигнала
В
задаче обнаружения сигнала неизвестен
сам факт наличия или отсутствия сигнала
 ,
в принятом колебании
,
в принятом колебании
 .
Сигнал представляет известную функцию
времени и параметров
.
Сигнал представляет известную функцию
времени и параметров
 .
.
Колебаниеr t представляется в виде

где
 - параметр
обнаружения, случайная величина,
принимающая одно из двух значений: 0
(сигнал отсутствует), 1 (сигнал
присутствует).
- параметр
обнаружения, случайная величина,
принимающая одно из двух значений: 0
(сигнал отсутствует), 1 (сигнал
присутствует).
2) Различение сигналов
В
простейшей задаче различения сигналов
предполагается наличие в смеси
одного из двух сигналов
 или
или
 .
.
3) Оценка параметров сигнала
В
задаче оценки параметров сигнала
считается,
что один из параметров
 сигнала
сигнала
 ,
является случайной величиной, априорная
плотность вероятности
,
является случайной величиной, априорная
плотность вероятности
 которого
известна. Параметр
представляет
один из компонентов вектора
которого
известна. Параметр
представляет
один из компонентов вектора
 . Задача
оценки заключается в определении с
минимальной погрешностью значения
параметра
по
принятой на интервале
. Задача
оценки заключается в определении с
минимальной погрешностью значения
параметра
по
принятой на интервале
 реализации смеси
.
реализации смеси
.
4) Фильтрация сообщений
Задача
фильтрации
сообщений возникает
в случае, если сигнал
,
зависит от некоторого информационного
параметра
, представляющего
случайную функцию времени
 с известными
статистическими характеристиками. На
основании статистических характеристик
помехи
с известными
статистическими характеристиками. На
основании статистических характеристик
помехи
 необходимо из принятой смеси
выделить
наилучшим образом функцию
, т.е. получить
оценку
необходимо из принятой смеси
выделить
наилучшим образом функцию
, т.е. получить
оценку
 реализации
информационного параметра.
реализации
информационного параметра.
5) Разрешение сигналов
В
простейших задачах разрешения
сигналов предполагается,
что смесь
представляет
сумму помехи
и двух налагающихся, возможно, сигналов
 и
и
 ,
зависящих, например, от двух параметров
,
зависящих, например, от двух параметров
 :
:

При
возможности одновременного наличия в
смеси двух сигналов ставится задача
их раздельного обнаружения или
раздельного обнаружения с оценкой
значений параметра
 в обоих сигналах. Первый сигнал считается
разрешённым в смысле обнаружения
(оценки параметра
),
если показатели обнаружения (оценки
параметра
)
первого сигнала остаются выше допустимых
в присутствии случайного второго
сигнала.
в обоих сигналах. Первый сигнал считается
разрешённым в смысле обнаружения
(оценки параметра
),
если показатели обнаружения (оценки
параметра
)
первого сигнала остаются выше допустимых
в присутствии случайного второго
сигнала.
3. Основные характеристики одномерной св
Случайная величина — это переменная, значения которой представляют собой исходы какого-нибудь случайного феномена или эксперимента
Дискретная
СВ Х
: принимает конечное число значений
{xi},
i=1,…,N.
Описывается вероятностями: {Pi=P(X=xi)},
совокупность
 – закон
распределения вероятностей
– закон
распределения вероятностей
Непрерывная СВ имеет непрерывную область случайных значений. Описывается функцией распределения Fx(x)=F(x)=P(X<x)
Плотность
вероятности:

Характеристическая функция – преобразование Фурье от плотности вероятности:

Числовые характеристики – моменты:
Математическое ожидание (начальный момент первого порядка): среднее значение

Дисперсия
(центральный момент второго порядка):
характеризует концентрацию ПВ р(х)
в окрестности МО

Моментом
порядка k
случайной величины Х относительно
числа b называется математическое
ожидание:

Начальным моментом или просто моментом порядка k называют M[xk]
Центральный
момент
порядка k - это момент относительно
центра распределения
 ,
т.е.
,
т.е.

4. Типовые семейства распределений одномерной св
Равномерное


Пример использования: описание случайной фазы сигнала, принимающей значения [-π,π]

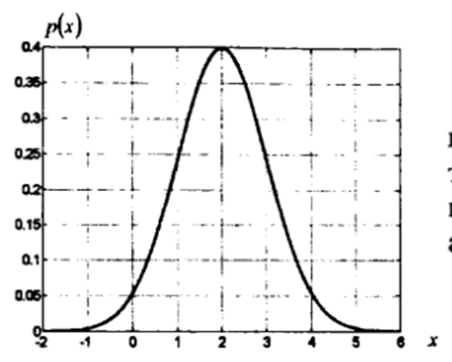
Нормальное (гауссовское):

Пример использования: для описания флуктуационных явлений в аппаратуре
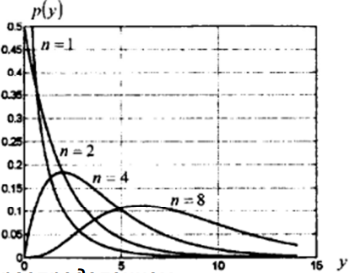
Хи-квадрат
распределение: совокупность
независимых гауссовских случайных
величин, имеющих нулевые МО и одинаковые
дисперсии.

 y
≥ 0 , n
– степени
свободы
y
≥ 0 , n
– степени
свободы


При n=2 – экспоненциальное распределение
В
случае, когда величины Хi
имеют ненулевые мат ожидания, распределение
 – нецентральное
– нецентральное
Пример: распределение квадрата огибающей радиосигнала
Релеевское:
частный случай хи-квадрат распределения
 .
Релеевская СВ: Z=
.
Релеевская СВ: Z=



Распределение Райса: обобщение релеевского распределения, когда Хi имеет ненулевые МО.
5. Последовательности св. Виды сходимости
Бесконечная последовательность СВ Xn, n = 1,2, ..., определенная на одном пространстве элементарных событий Ω, называется случайной последовательностью (случайным процессом с дискретным временем) и обозначается
{Xn}, n = 1,2,...
Пусть
Fn(x)
и F(x)
- функции распределения СВ Xn
и X
соответственно. Случайная последовательность
{Xn},
n
= 1,2,..., сходится
по распределению
к СВ X,
если последовательность функций
распределения Fn(x)
СВ Xn
сходится к функции распределения F(x)
СВ X
в каждой точке непрерывности функции
F(x),
т.е. Fn(x)
→ F(x)
при n → +∞. Этот вид сходимости будем
обозначать:

Случайная
последовательность {Xn},
n
= 1,2,..., сходится
почти наверное
(п.н.) к СВ X,
что записывается
 , если
, если

Случайная
последовательность {Xn},
n
= 1,2,..., сходится
по вероятности
к СВ X, что записывается как:
 ,
если если для всех ε > 0 справедливо
,
если если для всех ε > 0 справедливо

Случайная
последовательность {Xn},
n
= 1,2,..., сходится
к СВ X в
среднем квадратическом,
что записывается как:
 ,
если М[|Xn-X|2]→0
при n→∞
,
если М[|Xn-X|2]→0
при n→∞
Случайная последовательность {Xn}, n = 1,2,..., является последовательностью независимых СВ Xn, если при любом n СВ X1,... , Xn независимы.