Лекция 12. Самосинхронизация, привод и самозапуск
Повторим немного синхронизацию.
1) Согласно ПТЭ (правила технической эксплуатации), генераторы, как правило, должны включаться в сеть способом точной синхронизации.
2) При использовании точной синхронизации должна быть введена блокировка от несинхронного включения.
3) Допускается использование при включении в сеть способа самосинхронизации, если это предусмотрено техническими условиями на поставку или специально согласовано с заводом-изготовителем.
4) При ликвидации аварий в энергосистеме турбогенераторы мощностью до 220 МВт включительно и все гидрогенераторы разрешается включать на параллельную работу способом самосинхронизации.
5) Турбогенераторы большей мощности разрешается включать этим способом при условии, что кратность сверхпереходного тока к номинальному, определённая с учётом индуктивных сопротивлений блочных трансформаторов и сети, не превышает 3.
Способ точной синхронизации: мы сначала генератор возбуждаем, а затем включаем в сеть. При такой синхронизации достоинства: 1) малый уравнительный ток при правильном включении и 2) незначительное воздействие на сеть. А недостатки: 1) сложность, 2) длительность, 3) большой уравнительный ток при неправильном включении.
При самосинхронизации сначала генератор включают в сеть, а затем возбуждают. Достоинства: 1) простота и 2) быстрота. Недостатки: 1) большой уравнительный ток (он обязательно есть, потому что нет возбуждения), 2) из-за уравнительного тока сильные провалы напряжения в сети.
Уравнительный ток меньше тока КЗ, потому что сопротивление (знаменатель дроби) больше.
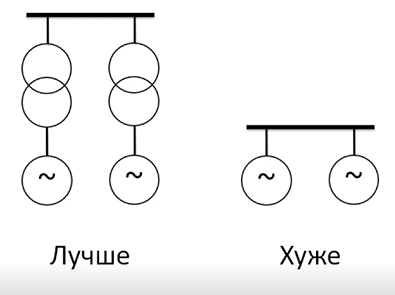
Провалы напряжения в сети хуже на генераторном напряжении, потому что там меньше сопротивление (нет сопротивления блочных трансформаторов). В правой схеме просадка напряжения на одной машине тождественно равна просадке напряжения на второй машине. Поэтому самосинхронизацию лучше применять на блочной схеме.
Но если у нас всё хорошо, то лучше использовать точную синхронизацию. А вот при авариях уже иногда бывает, что нужна самосинхронизация, потому что во время точной синхронизации иногда бывают рискованные ситуации.
Режимы работы электродвигателей
Есть 2 привода механизмов собственных нужд. Турбопривод (редко, например для компрессора в ГТУ, на ПТУ питательный насос) и электропривод (гораздо чаще).
Электропривод (электродвигатели) механизмов собственных нужд делится на:
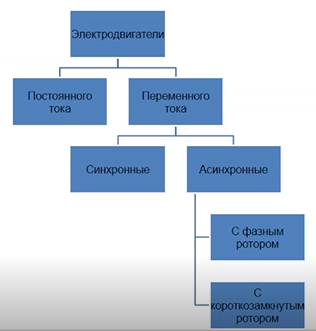
95% всего парка электродвигателей собственных нужд – это асинхронные электродвигатели с короткозамкнутым ротором.
Синхронные применяются для чего-то мощного и тихоходного, например мельница. И то, для чего не требуется непременного самозапуска.
Асинхронники дешевле, удобнее, меньше по мощности, с самозапуском. Фазный ротор нужен для механизмов, которые нужно постоянно регулировать, например, для регулирования подачи жидкого натрия в реактор.
Мы очень надеемся на успешный самозапуск при кратких перерывах питания, чтобы не потерялись собственные нужды.
Самозапуск
Самозапуск – это автоматическое (без вмешательства персонала) восстановление нормальной работы электродвигателей после кратковременного исчезновения (или глубокого снижения) напряжения питания и последующего восстановления питания.
Важное в определении выделено зелёным. Но тут он снова сказал, что важны 3 части:
1) Напряжение должно пропасть (или глубоко понизиться).
2) Должен быть перерыв питания.
3) Напряжение должно как-то восстановиться.
Если какого-то из этих пункта нет, то самозапуска нет.
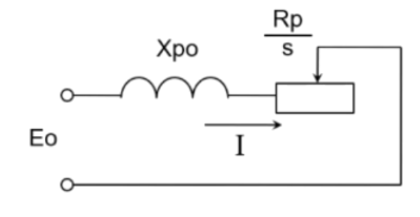
Схема замещения обмотки ротора
Чтобы вникнуть в процесс самозапуска, рассмотрим схему замещения обмотки ротора. Важный элемент – активное сопротивление цепи ротора, делённое на скольжение. Обычно активное сопротивление больше индуктивного из-за маленького скольжения. Если двигатель теряет питание, то двигатель замедляется, скольжение растёт, сопротивление падает. И пусковой ток становится намного больше номинального. И обычно скольжение становится больше критического в таких случаях. И Х становится больше, чем R.
На самом деле активное сопротивление не зависит от скольжения. Просто тут удобная математическая модель, используемая для удобства расчётов. От скольжения зависит ЭДС и индуктивное сопротивление (там sE0 и sX). Но мы в законе Ома просто всё поделили на s и получили такую схемку.
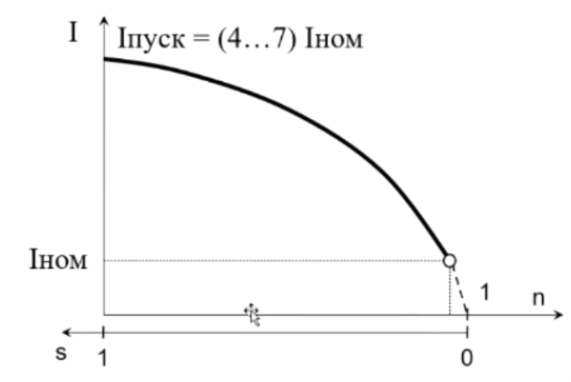
Зависимость тока АД от скольжения
По этому графику можно понять, на сколько пусковой ток (s=1) будет больше номинального (s близко к нулю, но не ноль).
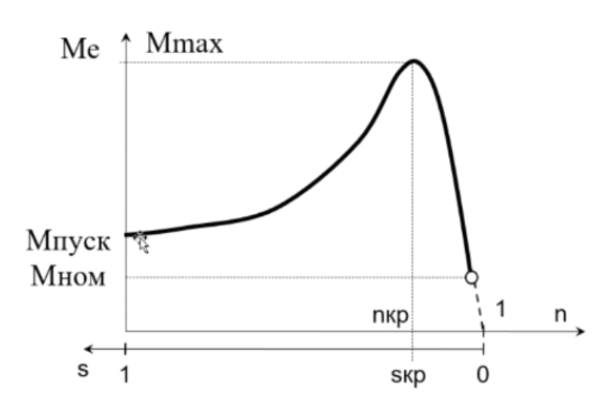
Зависимость электромагнитного момента АД от скольжения
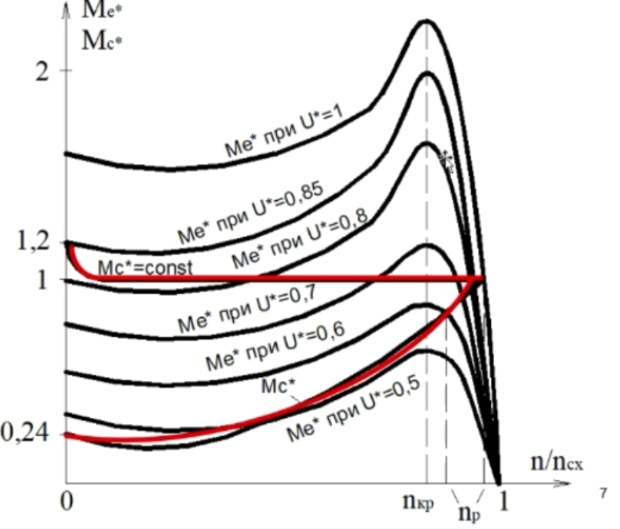
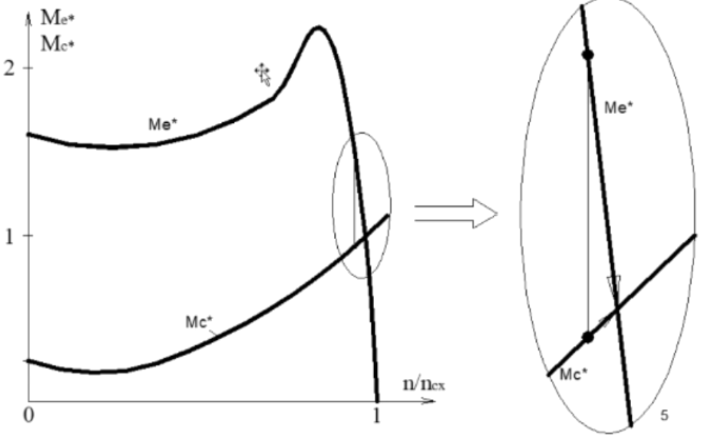
Критическому скольжению соответствует максимум момента. Рабочий режим это 0 < s < sкр, а при затормаживании s > sкр и наш пусковой момент будет не только меньше максимального, но ещё он может стать и меньше рабочего, поэтому требуется дополнительные затраты энергии. Но наш двигатель всё равно вернётся в устойчивую рабочую точку. Но для этого надо, чтобы электромагнитный момент был достаточно большим на фоне момента сопротивления. А для этого нужны большие напряжения при восстановлении питания (рисунок ниже).
А если напряжения будут небольшими, то случится такое, что показано на рисунке ниже. Либо пересечения графиков не будет вообще, тогда не будет рабочей точки в принципе. А если и есть пересечение, то оно может быть в неустойчивой рабочей точке.
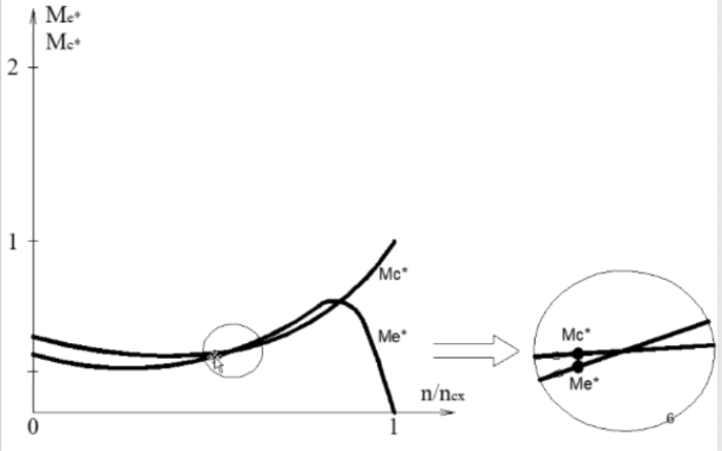
Ну а тут ниже показаны просто совокупности кривых при разных напряжениях. А красные кривые – это момент сопротивления (постоянный и вентиляторный). Ситуация с постоянным моментом хуже, потому что требуется большее сопротивление, чтобы выйти на рабочую устойчивую точку.