

МИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра АПУ
отчет
по лабораторной работе №2
по дисциплине «Теория автоматического управления»
Тема: Синтез системы управления и использование показателей качества для синтеза регуляторов
Вариант № 5
Студент гр. 930 |
|
. |
Преподаватель |
|
Брикова О.И. |
Санкт-Петербург
2021
Содержание
Задание 1 3
Задание 2 14
Задание 3 18
Заключение 22
Задание 1 Текст задания
Построить систему управления с использованием ПИ и ПИД регулятора, который бы обеспечивал
 0. Получить для
системы с каждым видом регулятора
переходную характеристику и частотные
характеристики. Сравнить полученные
результаты и сделать выводы.
0. Получить для
системы с каждым видом регулятора
переходную характеристику и частотные
характеристики. Сравнить полученные
результаты и сделать выводы.Определить параметры ПИД-регулятора при наименьшем перерегулировании в системе. При полученных параметрах определить запасы устойчивости по амплитуде и фазе, степень устойчивости и колебательности. Сделать выводы.
Определить параметры ПИД-регулятора при наименьшем времени регулирования в системе. При полученных параметрах определить запасы устойчивости по амплитуде и фазе, степень устойчивости и колебательности. Сделать выводы.
2. Вариант.
Вариант 5: h=6; q=1.5; k=3;
3. Выполнение задания
3.1 Построение системы управления с использованием ПИ и ПИД регулятора
Модель объекта
описывается следующим ДУ:
 .
Вид в системе MatLAB/Simulink
представлен на рис.1.
.
Вид в системе MatLAB/Simulink
представлен на рис.1.
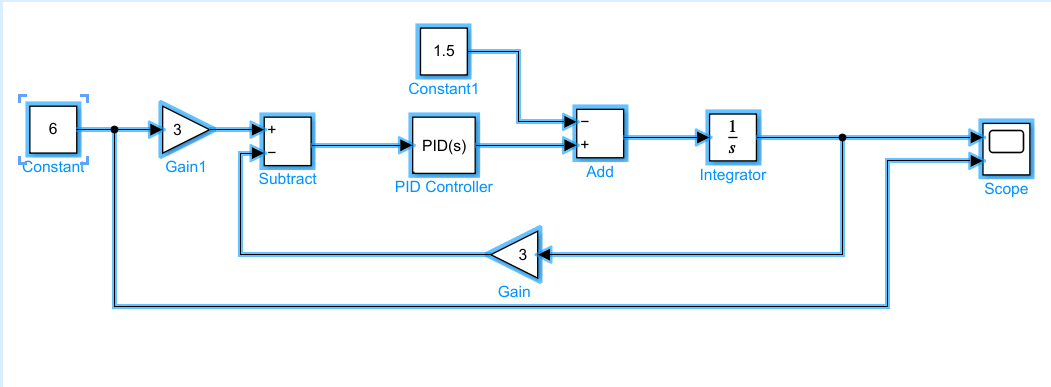
Рисунок 1 – Модель системы управления с ПИД-регулятором
Настройка параметров регулятора осуществляется с помощью инструмента PID Tuner, который доступен в окне параметров блока PID Controller (рис. 2). Для приведённой на рис.1. модели эти параметры: P= 0.323, I= 0.0623, D = -0.0885, N = 3.6468.
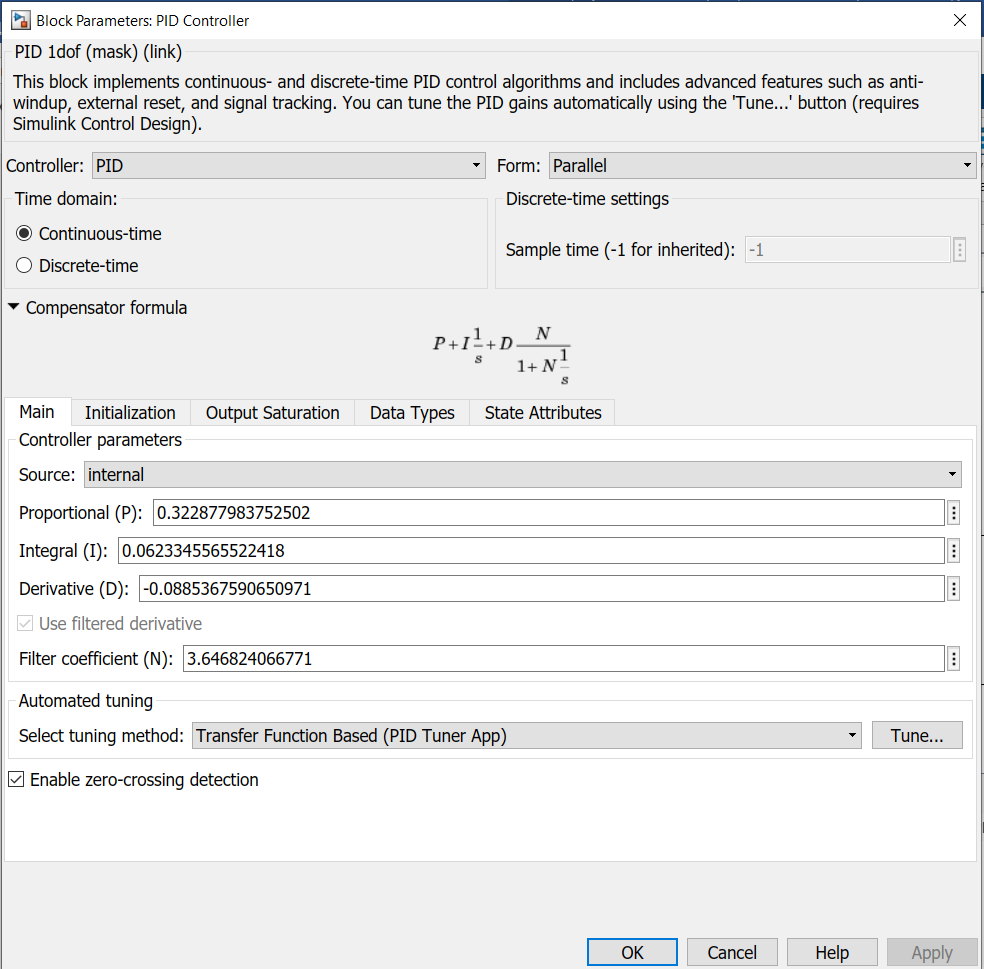
Рисунок 2 – Настройка параметров регулятора
Переходная характеристика для системы при стремящейся к нулю ошибке представлена на рис. 3
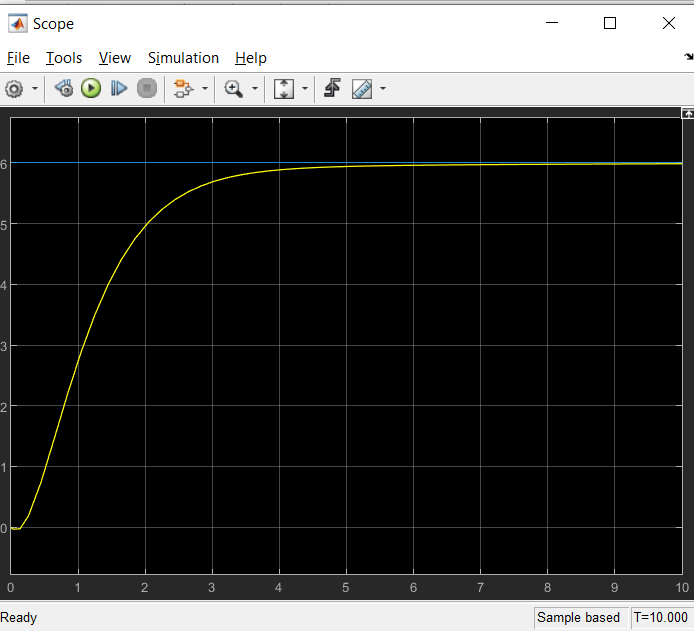
Рисунок 3 - Переходная характеристика системы управления с ПИД-регулятором
Из графика можно видеть, что выравнивание происходит на 7 секунде. Кривая плавно приближается к нулевой ошибке.
По диаграмме Боде,
представленной на рис.4, можно судить о
том, что резонансная частота находится
на уровне
 .
.
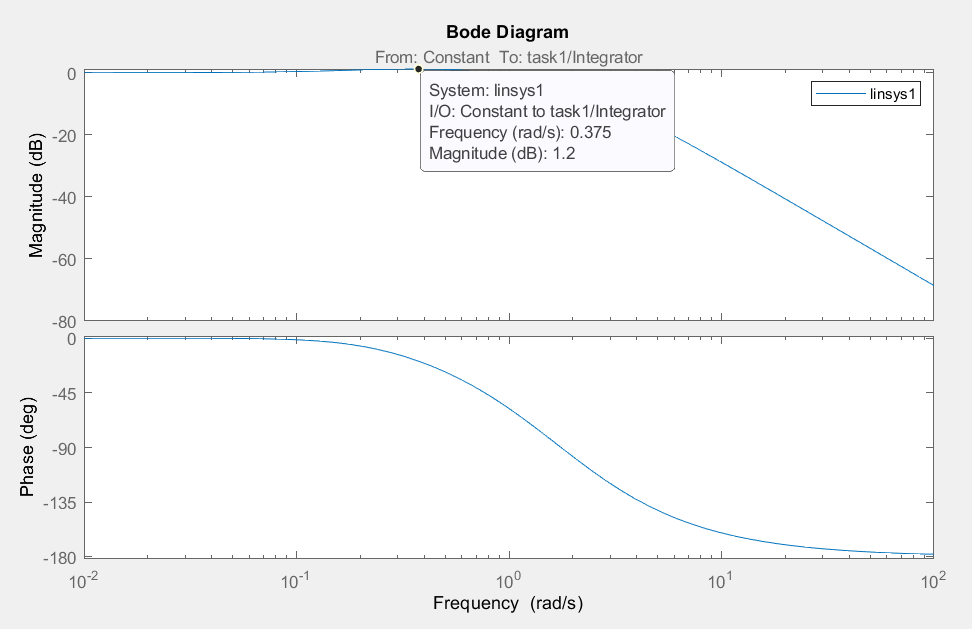
Рисунок 4 – Диаграмма Боде для системы управления с ПИД-регулятором
АФХ представлена на рисунке 5.
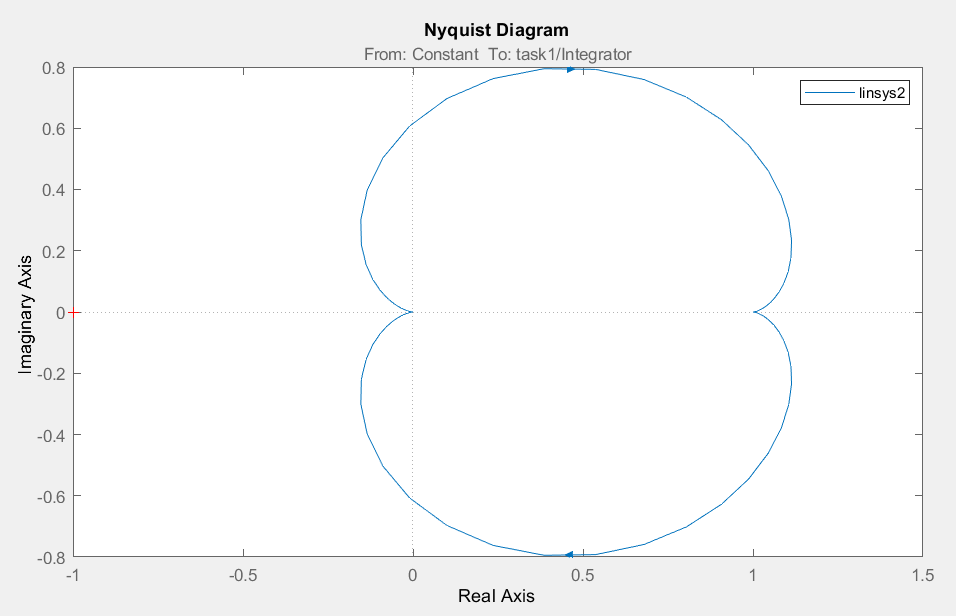
Рисунок 5 - АФХ системы управления с ПИД-регулятором
Диаграмма расположения корней на корневой плоскости представлена на рис. 6. По последним двум диаграммам можно судить об устойчивости системы.
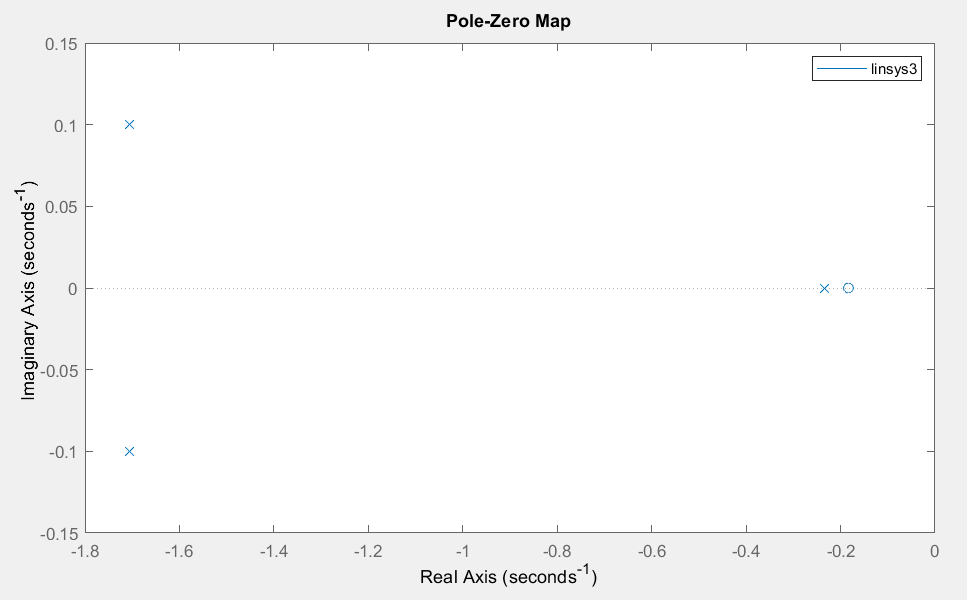
Рисунок 6 - Расположение корней системы управления с ПИД-регулятором
Вид модели системы с ПИ-регулятором в системе MatLAB/Simulink представлен на рис.7.
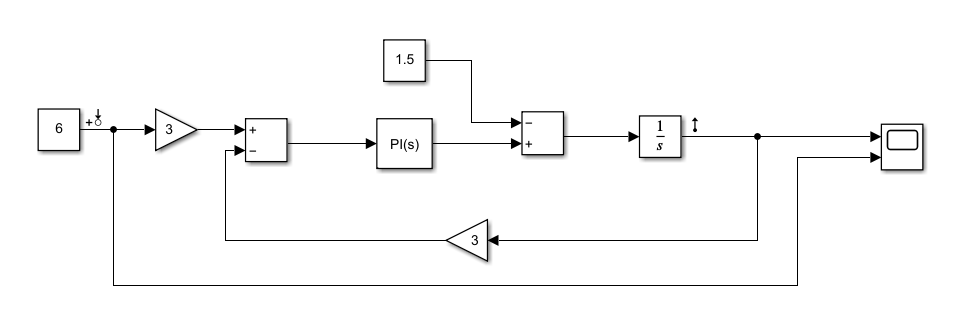
Рисунок 7 - Модель системы управления с ПИ-регулятором
Настройка параметров регулятора осуществляется с помощью инструмента PID Tuner, который доступен в окне параметров блока PID Controller (рис. 7). Для приведённой на рис.8 модели эти параметры: P = 0.2243, I= 0.2465.
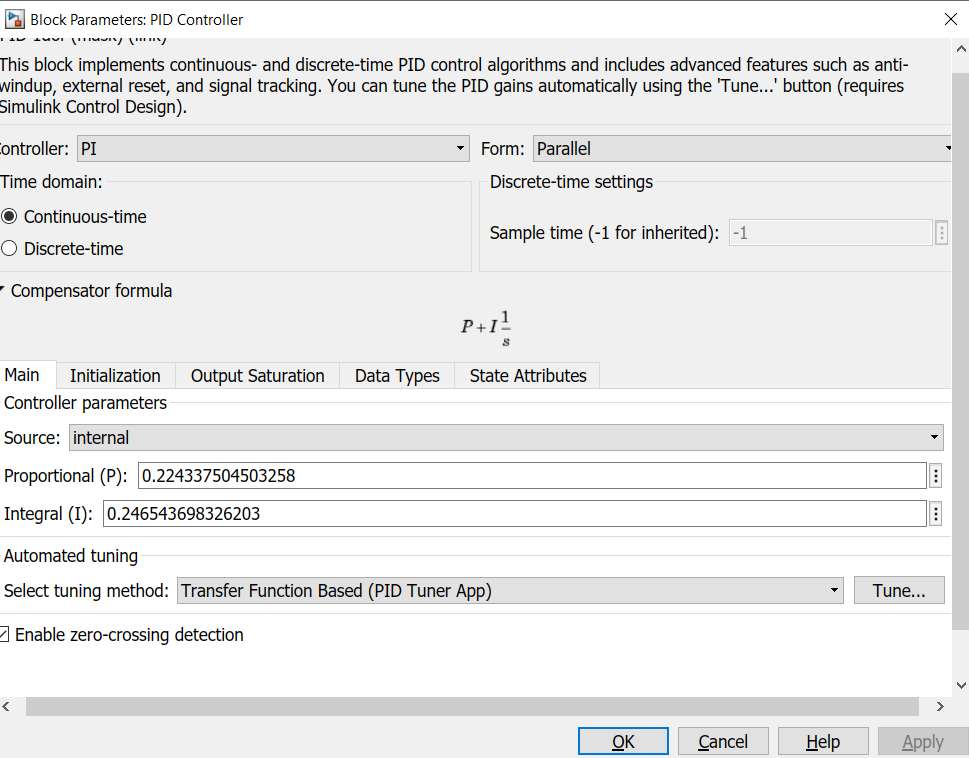
Рисунок 8 - Настройка параметров регулятора
Переходная характеристика для системы при стремящейся к нулю ошибке представлена на рис. 9
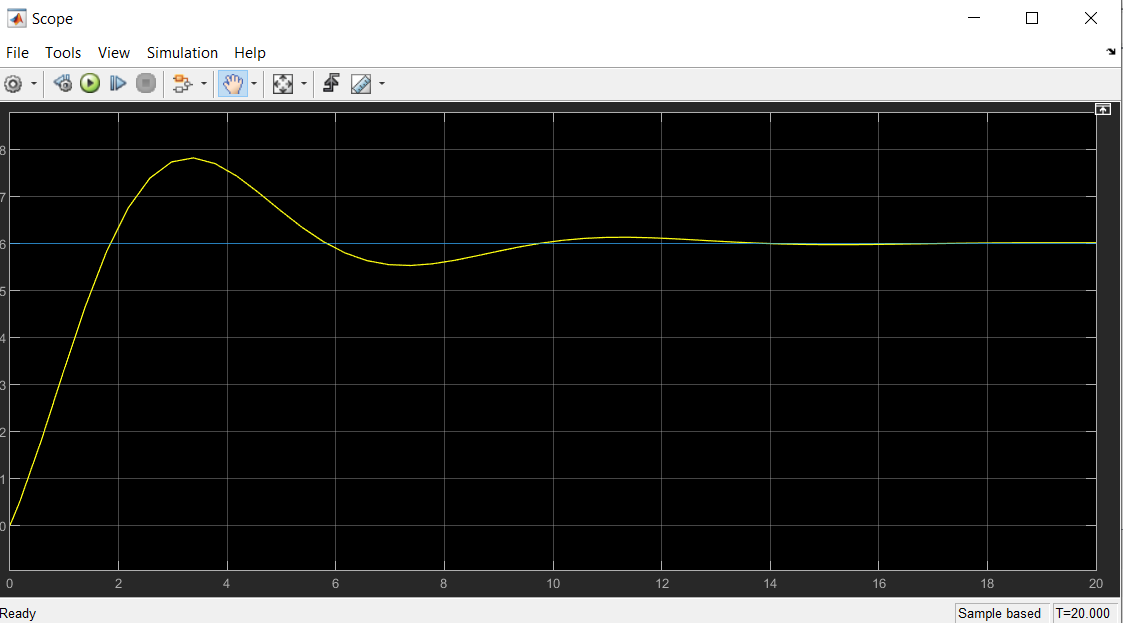
Рисунок 9 - Переходная характеристика системы управления с ПИ-регулятором
По переходной характеристике можно судить, что выравнивание системы происходит к 18-й секунде, после этого времени ошибка нулевая
По диаграмме Боде,
представленной на рис.10, можно судить
о том, что резонансная частота находится
на уровне
 .
.
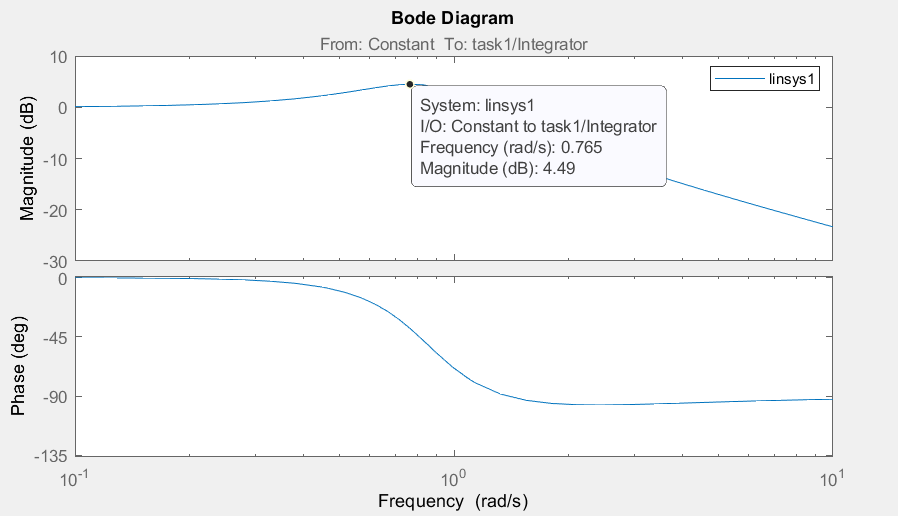
Рисунок 10 - Диаграмма Боде для системы управления с ПИ-регулятором
АФХ представлена на рисунке 11.
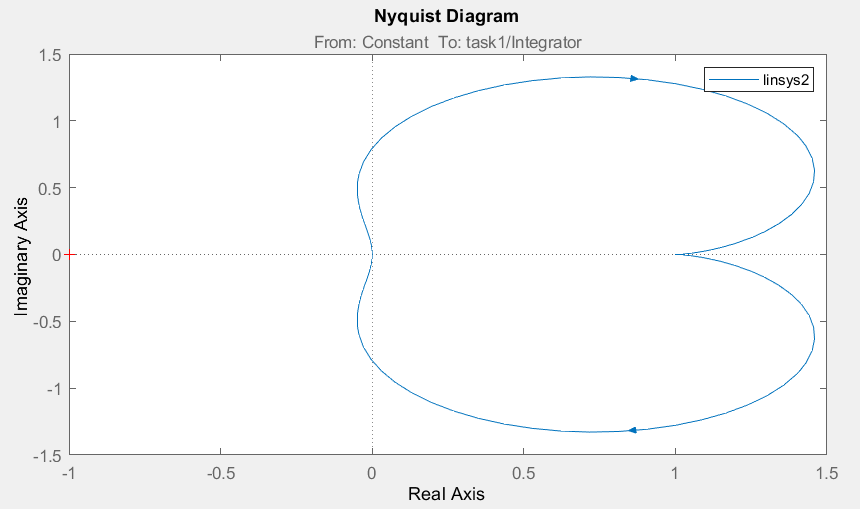
Рисунок 11 - АФХ системы управления с ПИ-регулятором
Диаграмма расположения корней на корневой плоскости представлена на рис. 12. По последним двум диаграммам можно судить об устойчивости системы

Рисунок 12 - Расположение корней системы управления с ПИ-регулятором
3.2 Определение параметров ПИД-регулятора при наименьшем перерегулировании в системе.
Параметры регулятора при наименьшем перерегулировании в системе представлены на рис.13.
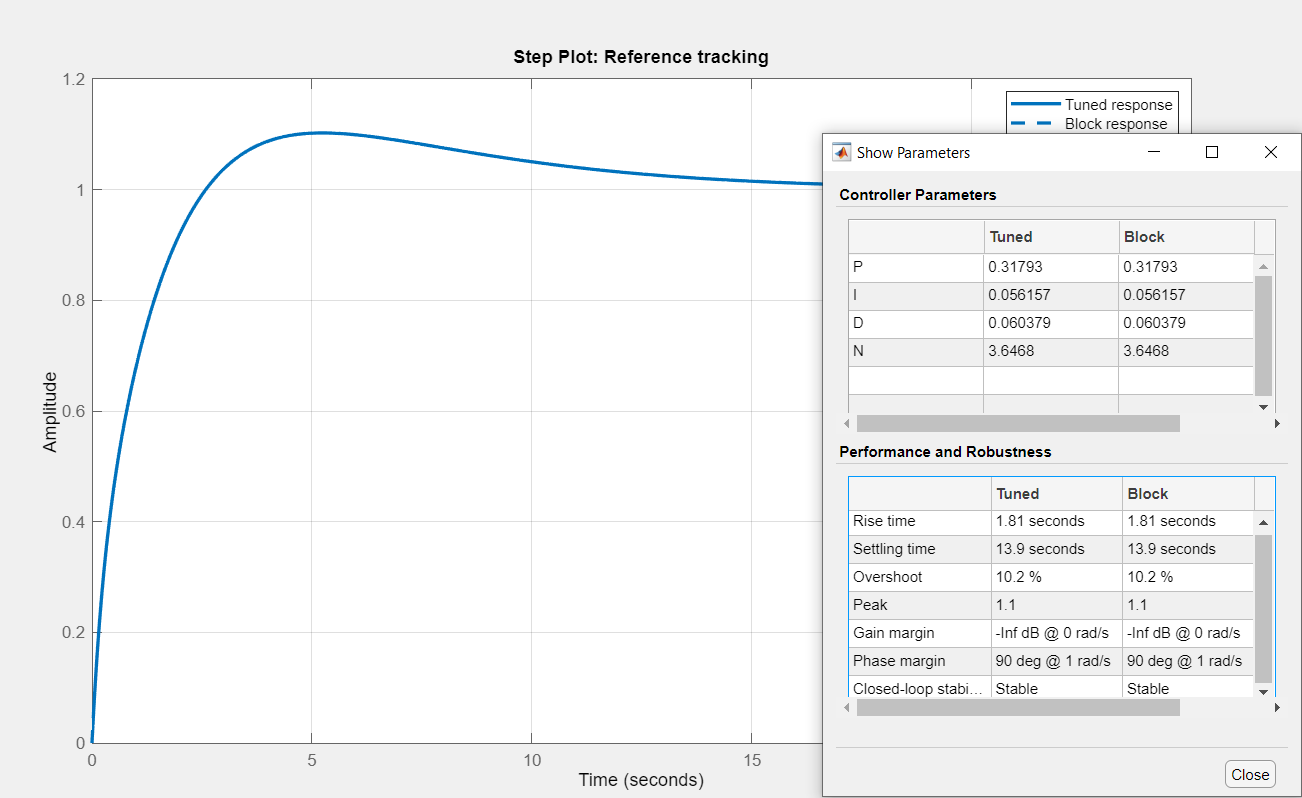
Рисунок 13 - Параметры ПИД-регулятора при наименьшем перерегулировании в системе
Можно видеть, что при параметрах: P = 0.31793, I = 0.056157, D = 0.060379 – перерегулирование в системе составляет 10.2%, время регулирования – 13.9 сек.
Запас устойчивости
по амплитуде отсутствует, а по фазе –
 .
Это можно посчитать по диаграмме Боде,
нажав по схеме ПКП
Characteristics
minimum stability margins, эта точка выделена на
рис.14.
.
Это можно посчитать по диаграмме Боде,
нажав по схеме ПКП
Characteristics
minimum stability margins, эта точка выделена на
рис.14.
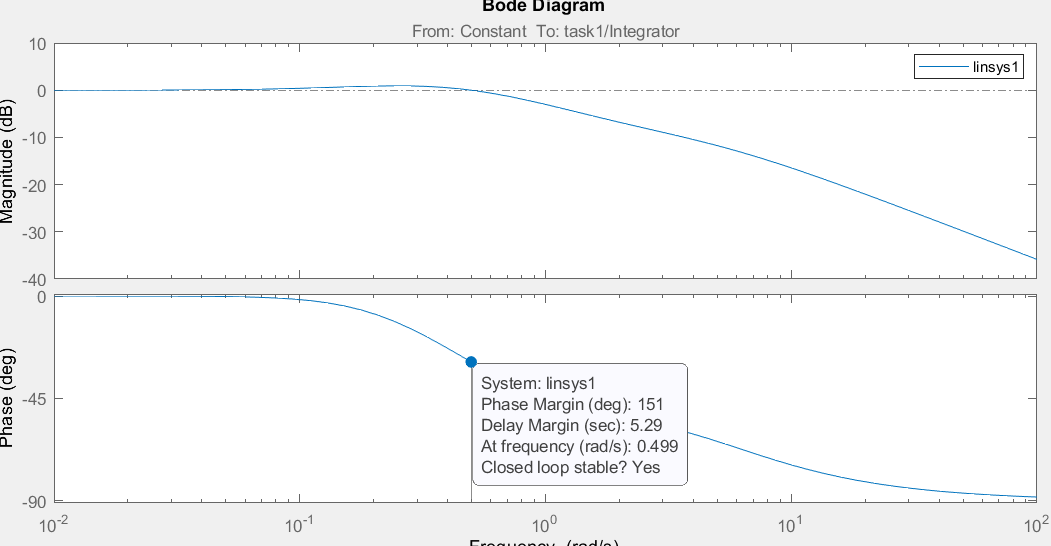
Рисунок 14 - Диаграмма для системы с наименьшим регулированием
Степень устойчивости – абсолютное значение действительной части ближайшего к мнимой оси корня. Корнями являются и нули, и полюса, так что у нас это 0.264. Это видно из диаграммы, представленной на рис.15.
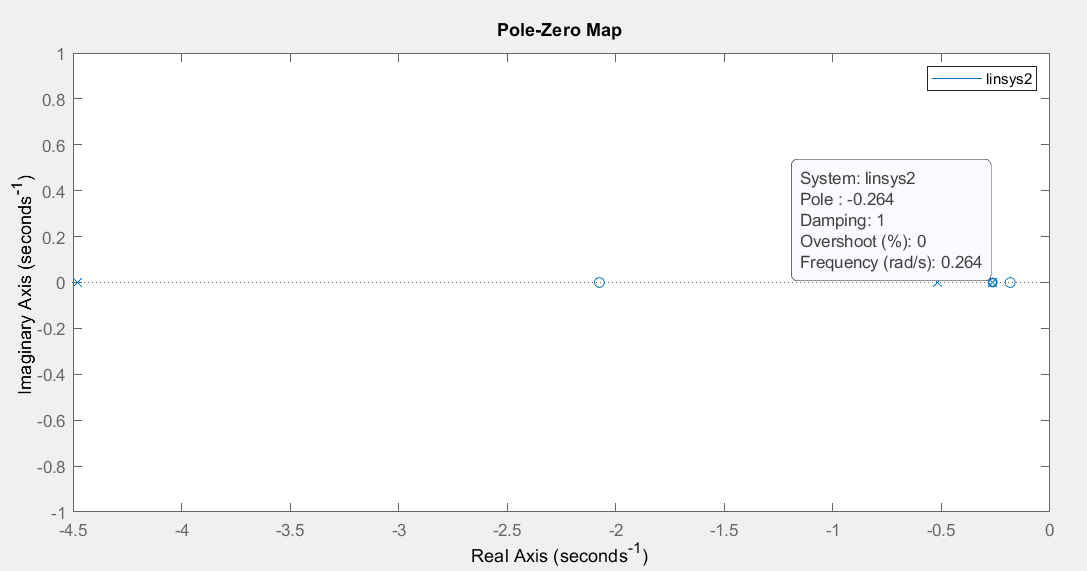
Рисунок 15 - Диаграмма расположения корней для системы с наименьшим перерегулированием на ПИД-регуляторе
Степень колебательности
 У нас m =∞, так как отсутствует мнимая
часть у корней. Чем больше m, тем быстрее
затухает колебательный процесс. У нас
колебательного процесса как такового
нет (m=∞), поэтому и система приходит к
нулевой ошибке не так быстро.
У нас m =∞, так как отсутствует мнимая
часть у корней. Чем больше m, тем быстрее
затухает колебательный процесс. У нас
колебательного процесса как такового
нет (m=∞), поэтому и система приходит к
нулевой ошибке не так быстро.
3.3 Определение параметров ПИД-регулятора при наименьшем времени регулирования в системе
Параметры регулятора при наименьшем перерегулировании в системе представлены на рис.16.
Можно видеть, что при таких параметрах: P = 0.34255, I = 0.065523, D = -0.072187, N = 1.7204 – перерегулирование в системе составляет 13.5%, время регулирования – 12.2 сек.

Рисунок 16 - Параметры ПИД-регулятора при наименьшем времени регулирования в системе
Запас устойчивости по амплитуде отсутствует, а по фазе – . Это можно посчитать по диаграмме Боде, нажав по схеме ПКП Characteristics minimum stability margins, эта точка выделена на рис.17.
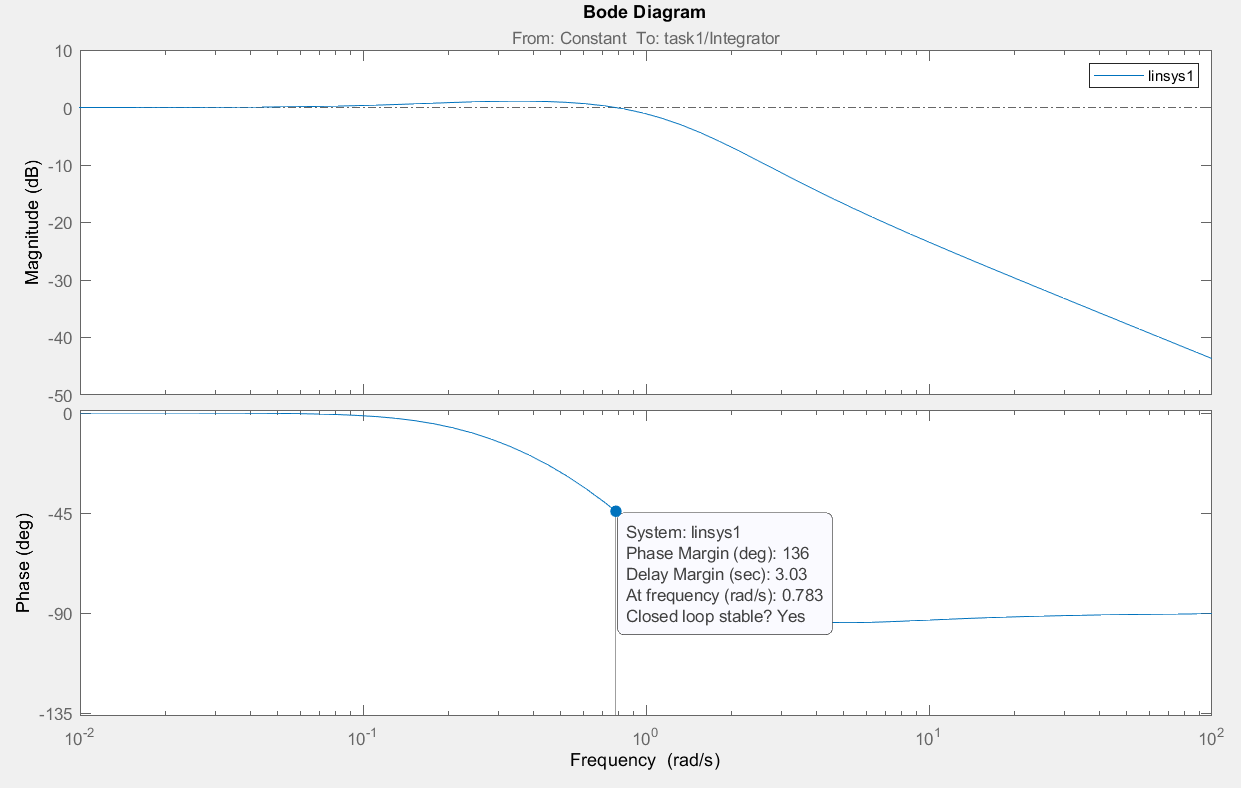
Рисунок 17 - Диаграмма для системы с наименьшим регулированием
Корнем является полюс, выделенный на рис. 18, так что у нас это 0.23.
Чем
больше степень устойчивости, тем быстрее
затухает процесс. Время регулирования
можно оценить, соотнеся – ( ).
).
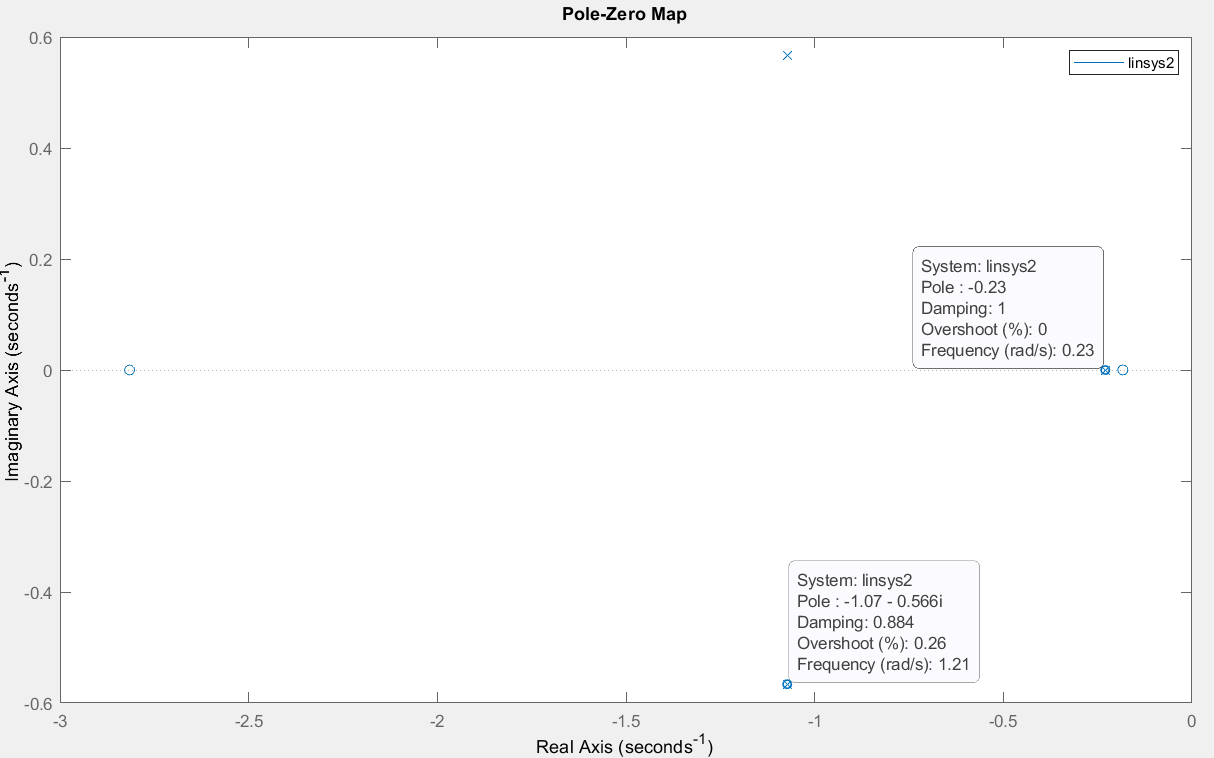
Рисунок 18 - Расположение корней для системы с наименьшим временем регулирования
Степень
колебательности –
 .
У нас есть два комплексно-сопряжённых
корня, с помощью которых можно рассчитать
коэффициент m. Чем больше
.
У нас есть два комплексно-сопряжённых
корня, с помощью которых можно рассчитать
коэффициент m. Чем больше
 ,
тем быстрее затухает колебательный
процесс.
,
тем быстрее затухает колебательный
процесс.
 ,
это считается более-менее оптимальным
показателем.
,
это считается более-менее оптимальным
показателем.
Выводы
Так как ПФ обратной связи не равна 1, ошибка на входе в регулятор рассчитывается неправильно – по его «мнению», на вход должно подаваться в 2 раза больше воды, чем на самом деле. Поэтому необходимо было подобрать коэффициент для входного сигнала (промасштабировать его) так, чтобы в итоге регулятор стремился к нужному значению.
В ходе анализа системы было выявлено, что регуляторы справляются со своей задачей. Для ПИД-регулятора с наименьшим перерегулированием в системе уменьшаются колебания ошибок, однако при таких параметрах регулятора система будет менее стабильна, чем при уменьшении времени регулирования.
Сравнивая рис.3 и рис.9 можно увидеть, что при отсутствии у регулятора дифференциальной составляющей (ДС) система выравнивается с колебаниями, что позволяет системе избегать колебаний в значении.
Задание 2
Текст задания
Для объекта, который описывается следующей передаточной функцией:
Вычислить операторным методом параметры регулятора, с учетом
следующих требований к процессу:
1.1Запас устойчивости по фазе не менее 60 °;
1.2 Перерегулирование в системе не более 10%;
1.3 eуст → 0
2. Построить систему без регулятора и систему с регулятором в среде
Matlab/SIMULINK. Для каждой системы получить переходные характеристики, частотные характеристики (ЛЧХ, АФХ).