

ПЗ 4. Исследование PID-регулятора
.pdfТема: «Исследование ПИД – регулятора»
Цель работы: изучение ПИД-регулятора и методов его настройки.
Задачи работы: произвести настройку ПИД-регулятора методами: Шубладзе, Циглера-Никольса, Куна – «правило Т-суммы» и Шеделя; сравнить показатели качества переходного процесса системы без регулятора и системы с регулятором.
Студент должен
уметь:
-настраивать ПИД-регулятор различными методами;
-методом моделирования в Simulink/MatLab определять временные характеристики систем без регулятора и с регулятором.
знать:
-понятние регулятора;
-передаточные функции, достоинства и недостатки типовых регуляторов;
-различные методы настройки ПИД – регуляторов;
-достоинства и недостатки различных методов настройки ПИД– регуляторов.
Теоретическое введение
Рис. 4.1. Замкнутая система управления: Wр – передаточная функция регулятора; Wо – передаточная функция объекта управления
Рассмотрим типовые алгоритмы управления (законы регулирования), применяемые в линейных автоматических системах.
1. П (пропорциональный) – регулятор:
Простейший закон регулирования реализуется при помощи безынерционного звена с передаточной функцией
WP ( p) ex(( pp)) kP x( p) kP e( p) .
Согласно этому выражению, управляющее воздействие и в статике и в динамике пропорционально сигналу ошибки е. Поэтому такой закон регулирования называется пропорциональным (П).
Преимуществами данного регулятора являются простота и быстродействие, а недостатком – ограниченная точность.
2. И (интегральный) – регулятор:
Закон регулирования, которому соответствует передаточная функция
W P |
( p) |
k |
И |
|
k p |
|
|
x p |
TИ р x p k p e( p) x p |
k p |
e( p) |
, |
||
|
|
|
|
|
|
|
TИ р |
|||||||
|
|
р TИ |
р e( p) |
|
|
|||||||||
где ТИ – постоянная времени регулятора.
Здесь управляющее воздействие у в каждый момент времени пропорционально интегралу от сигнала ошибки е. Поэтому И - регулятор реагирует главным образом на длительные отклонения управляемой величины от заданного значения. Кратковременные отклонения сглаживаются таким регулятором.

Преимуществом данного регулятора является лучшая по сравнению с П - регулятором точность установки режима, а недостатками – худшие по сравнению с П - регулятором показатели качества, а именно большая колебательность и меньшее быстродействие.
3. ПИ – регулятор:
Наибольшее распространение в промышленной автоматике получил про-
порционально-интегральный (ПИ) закон регулирования
Wp p kп kИ / р k p k p / TИ р k p TИ р 1 / TИ р .
Объединяет два регулятора П и И, следовательно, обладает наилучшими свойствами по сравнению с вышеописанными регуляторами, а именно: за счет П - составляющей улучшается показательные качества в переходном процессе, а за счет И - составляющей уменьшается ошибка регулирования т.е. улучшается точность.
4. Д (дифференциальный) – регулятор: |
|
||||||
Wp p k p TД р |
x( p) |
x( p) k p TД |
|
de t |
|
, |
|
e( p) |
dt |
||||||
|
|
|
|
||||
где ТД – постоянная времени Д – регулятора.
Преимуществом данного регулятора является то, что х(р) зависит от дифференциальной ошибки, и регулятор реагирует на малейшее изменение ошибки. Однако очень большим недостатком является плохая помехоустойчивость (очень чувствительный). На практике практически не используется в чистом виде - как и идеальное дифференцирующее звено.
5. ПД – регулятор:
Наилучшее быстродействие достигается при пропорционально - дифференциальном (ПД) законе регулирования
Wp p k p k Д p k p k pTД р ex pp x p k p e p k pTД dedtt .
ПД – регулятор реагирует не только на величину сигнала ошибки, но и на скорость его изменения. Благодаря этому при управлении достигается эффект упреждения. Недостатком пропорционально – дифференциального закона регулирования является ограниченная точность.
6. ПИД – регулятор:
Наиболее гибким законом регулирования (в классе линейных законов) яв-
ляется пропорционально – интегрально – дифференциальный (ПИД) закон
Wp p kn |
k |
И |
|
TИ р 1 Т И Т Д |
р2 |
TИ Т Д |
|
k p |
|
Т Д р , |
|
|
k Д р k p |
|
|
k p |
|
|
|
k p |
|||
р |
TИ р |
|
TИ р |
TИ р |
|||||||
|
|
|
|
|
|
|
|||||
который сочетает в себе преимущества более простых законов. Объединяет три регулятора П, И и Д, обладает преимуществами всех регуляторов, а недостатком является сложность реализации.
Параметры, входящие в различные записи ПИД-закона, связаны между собой соотношениями:
kп = kp ; kи = kp / Tи ; kд = kp Tд.
В настоящее время еще отсутствует единый метод расчета параметров регулятора для контура регулирования. Однако предложен ряд подходов, многие из которых требуют наличия математической модели реального объекта
4.2. Ход работы
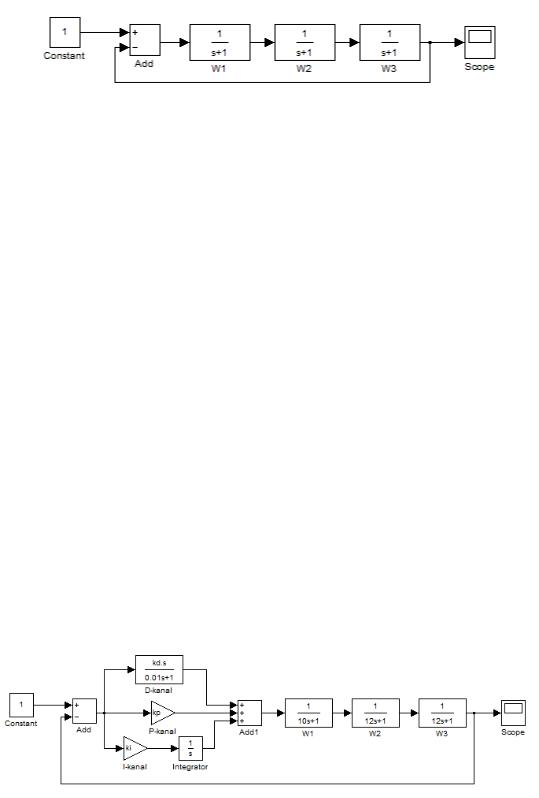
1. Собрать систему в приложении Simulink среды MatLab, замкнутую отрицательной обратной связью, как представлено на рисунке.
Рис. 4.2. Система, замкнутая обратной связью: W1-W3 – передаточные функции ОУ (блоки Transfer Function); Add – элемент сравнения с отрицательным вторым входом; Scope – осциллограф; Constant – постоянное входное воз-
действие (в данном случае это аналог единичного ступенчатого скачка)
2.Заполнить значения передаточных функции объекта управления в соответствии с вариантом
3.В окне Scope выбираем  Parameters. Во вкладке Data History убираем галочку с Limit Data Points to last. Нажимаем Apply. Закрываем окно Scope.
Parameters. Во вкладке Data History убираем галочку с Limit Data Points to last. Нажимаем Apply. Закрываем окно Scope.
4.В окне Simulation-Configuration parameters выбираем: Type – Fixed-Step.
В окне Fixed step size вводим 0.01. Применяем настройки.
5.Моделируем систему. Если переходный процесс не кончился, то увеличиваем время моделирования. Делаем скриншот структурной схемы и результатов моделирования. В таблицу 3 вводим показатели качества переходного процесса системы без регулятора.
6.Добавляем в систему ПИД-регулятор, как это представлено на рисунке
4.3.
П – звено представлено блоком Gain; И – звено представлено блоками Gain
иIntegrator; Д -–звено представлено блоком Transfer Function. (Важно!!! П-, и И-
законы представлены идеальными пропорциональным и интегрирующим звеньями соответственно; Д – канал же представлен реальным дифференцирующим звеном). В знаменателе передаточной функции Д-звена записываем [0.01 1]. В числителе [kd 0].
7.Производим расчет kp, ki и kd методом, указанным в варианте и под-
ставляем полученные численные значения в схему.
Рис. 4.3. Система регулирования по отклонению (ПИД-регулятор + объект управления)

8. Моделируем систему. Если переходный процесс не кончился, то увеличиваем время моделирования. Делаем скриншот структурной схемы и результатов моделирования. В таблицу 2 вводим показатели качества переходного процесса системы с ПИД-регулятором. Делаем выводы.
Методы настройки ПИД-регулятора
1. Эмпирический метод настройки Циглера-Никольса
Впервые этот метод был изложен в работе двух американских инженеров Циглера и Никольса в 1942 году. Суть данного метода состоит в следующем:
в функционирующей системе выключаются интегральная и дифференциальная составляющие ПИД-регулятора (Т И ,Т Д 0 ), то есть система
переводится в П-закон регулирования;
путем последовательного увеличения К p с одновременной подачей
небольшого скачкообразного сигнала задания добиваются возникновения в системе незатухающих колебаний с периодом Ткр . Это соответствует выведению
системы на границу колебательной устойчивости. При возникновении данного режима работы фиксируются значения критического коэффициента усиления регулятора Ккр и периода критических колебаний в системе Ткр . При появлении
критических колебаний ни одна переменная системы не должна выходить на уровень ограничения;
далее рассчитываются и устанавливаются параметры ПИДрегулятора по следующим формулам:
К Р 0.6К КР , Т И Т КР |
2 , Т Д Т КР 8 . |
(1) |
Параметры, входящие в различные записи ПИД-закона, связаны между собой соотношениями:
kп = kp ; kи = kp / Tи ; kд = kp Tд.
Ход настройки методом Циглера-Никольса:
1.Выполнить пункт 1.А или 1.Б по усмотрению:
1. А. Перевести систему управления из ПИД-закона регулирования в П- закон регулирования. Постепенно увеличивая критический коэффициента усиления регулятора Ккр добиться незатухающих колебаний в системе и зафиксиро-
вать период критических колебаний Ткр .
2.Б. Методом Гурвица определить коэффициент усиления, при кото-
ром система будет на границе устойчивости Кустойч. По формуле Ккр=Кустойч/Коу вычичислить критический коэффициент усиления. Добившись незатухающих
колебаний в системе, зафиксировать период критических колебаний Ткр .
2. По найденным Ккр и Ткр рассчитать по формулам настройки ПИД-
регулятора.
3. Провести моделирование системы и получить переходный процесс системы с ПИД-регулятором.
Метод настройки Шубладзе
ПИД-регуляторы используются для управления динамическими процессами с изменяющимися в широких диапазонах параметрами и подверженными

воздействию неконтролируемых возмущений в системах автоматического управления.
Передаточная функция объекта управления включает параметры – статический коэффициент усилия объекта управления k 0 , постоянные времени объ-
екта Т 1 и Т 2 и степень n :
W ( p) |
k0 |
|
|
|
. |
(2) |
|
(T p 1) n |
|
(T |
2 |
p 1) |
|||
|
1 |
|
|
|
|
|
|
Приведенная передаточная функция при выборе соответствующих параметров может описывать объекты с чистым запаздыванием.
Зависимость настроечных параметров ПИД-регулятора представлена следующими соотношениями:
пропорциональный коэффициент настройки находится по формуле:
kп |
|
(( Т I 1) n 1 |
((n 2) Т Т I 2 |
|
|||
1 |
|
1 |
2 |
|
|
||
|
|
|
|
|
|||
|
|
|
k0 |
|
|
; |
(3) |
|
|
|
|
|
|
||
((n 1) T1 2 T2 ) I 1) 2 k д k |
0 I ) |
|
|
||||
k0
интегральный коэффициент настройки находится по формуле:
k |
|
( ( Т |
|
I 1) n (Т |
|
I 1) |
I |
k |
|
I 2 k |
|
I |
; |
(4) |
|
и |
1 |
2 |
|
д |
п |
||||||||||
|
|
|
|
k |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
дифференциальный коэффициент настройки находится по формуле:
k д |
|
0 . 5 ( Т I 1) n 2 |
( (n 1) (n 2) T 2 |
Т I 2 |
|
1 |
1 |
2 |
|
||
|
|
|
|||
|
|
|
k 0 |
|
(5) |
(n 1) (n T1 4 T2 ) T1 I 2 (n T1 T2 ) )
k 0
При n 2 :
I |
|
1 |
|
1 |
, |
(6) |
|
|
|
||||
2 |
T1 |
4 T2 |
|
|
||
Коэффициенты настройки ПИД-регулятора рассчитываются при подстановке параметров передаточной функции объекта управления в формулы 6, 7, а затем по формулам (3)–(5).
Ход настройки методом Шубладзе
1Для объекта управления по формулам (4)-(6) рассчитать коэффициенты настройки ПИД-регулятора.
2Провести моделирование системы и получить переходный процесс системы с ПИД-регулятором.
Метод настройки Куна – «Т-правило»
Параметром, характеризующим быстродействие рассматриваемых объектов, является суммарная постоянная времени T . Этот параметр был введен мно-
гими авторами в начале 1960-х годов. Для системы с передаточной функцией:
F (s) K s (1 TD1 s) (1 TD 2 s) . . (1 TD m s) e s Tt (1 T1 s) (1 T2 s) . . (1 Tn s)
суммарная постоянная времени:
T T1 T2 .. Tn TD1 TD 2 .. TD m Tt .
Метод основан на аппроксимации объекта звеном третьего порядка вида:
W (s) |
KS |
, |
(T1 s 1)(T2 s 1)(T3 s 1) |
где Т1 Т 2 Т 3 Т3 .
Затем Т И и Т Д выбирают таким образом, чтобы компенсировать два полю-
са по таблице.
Таблица 4.1. Выбор параметров ПИД - регулятора методом Куна
Вид настройки |
Тип регулятора |
Параметры регулятора |
|||
К Р |
Т И |
Т Д |
|||
|
|
||||
|
ПИД |
1 K S |
0 . 6 6Т |
0 . 1 6 7Т |
|
Параметры, входящие в различные записи ПИД-закона, связаны между собой соотношениями:
kп = kp ; kи = kp / Tи ; kд = kp Tд.
Ход настройки методом Куна:
1. Для объекта вычислить суммарную постоянную времени объекта.
2Рассчитать параметры ПИД-регулятора с использованием формул нормальной настройки из таблицы 1.
3Провести моделирование системы и получить переходный процесс системы с ПИД-регулятором.
4Рассчитать параметры ПИД-регулятора с использованием формул быстрой настройки из таблицы 1.
5Провести моделирование системы и получить переходный процесс системы с ПИД-регулятором.
Метод настройки Шеделя
Метод основан на принципе каскадного коэффициента демпфирования. Шедель обобщает понятие коэффициента демпфирования на случай системы третьего порядка. Здесь для системы с передаточной функцией вида:
W (s) |
|
|
|
|
К |
|
|
|
|
|
|
(8) |
|
|
|
|
|
|
|
|
|
|
|||
а |
s 3 а |
2 |
s 2 |
а |
s 1 |
|||||||
3 |
|
|
1 |
|
|
|
|
|
||||
справедливы следующие выражения: |
|
|
|
|
|
|
|
|||||
a12 4d 02 a2 0 , a22 4d12 a1a3 0 . |
|
|||||||||||
Коэффициенты ПИД-регулятора настраивают так, чтобы коэффициенты |
||||||||||||
|
|
|
|
|
|
d1 0 . 5 . |
|
|||||
демпфирования системы были равны d 0 |
|
2 3 |
|
, |
|
|||||||
В случае объекта вида: |
|
|
|
|
|
|
|
|
|
|
||
W (s) |
|
|
|
|
К |
|
|
|
, |
(9) |
||
|
|
|
|
|||||||||
T 3 s 3 |
T 2 s |
2 |
T s 1 |
|||||||||
|
|
|
3 |
|
|
2 |
|
|
1 |
|
|
|
Параметры ПИД-регулятора рассчитываются по следующим формулам:
|
|
|
Т |
2 |
|
Т 3 |
|
|
|
Т |
2 |
Т 2 |
|
|
|
0 . 3 7 5Т |
И |
|
|
||
Т |
|
|
|
2 |
|
|
3 |
, Т |
|
|
|
1 |
2 |
и К |
|
|
|
|
. |
(11) |
|
|
Д |
|
Т1 |
Т |
2 |
|
И |
|
Т1 |
Т Д |
|
Р |
|
K (Т1 |
Т И ) |
|
|||||
|
|
|
2 |
|
|
|
|
|
|
|
|||||||||||
Метод Шеделя сокращает время переходного процесса, незначительно увеличивая перерегулирования (менее 10%).
Параметры, входящие в различные записи ПИД-закона, связаны между собой соотношениями:
kп = kp ; kи = kp / Tи ; kд = kp Tд.
Ход настройки методом Шеделя
1.Записать передаточную функцию первого объекта управления в виде (8).
2.Рассчитать настройки параметров ПИД-регулятора по формулам (11).
3.Провести моделирование системы и получить переходный процесс системы с ПИД-регулятором.
Задание :
Таблица 2. Варианты заданий
№ варианта |
Передаточная функция ОУ |
Методы настройки |
||||||||
1 |
|
|
|
|
7 |
|
|
|
Циглера-Никольса |
|
|
|
|
|
|
|
|
|
|
|
Шубладзе |
|
|
|
(6 0 p 1) |
2 |
(1 0 0 p 1) |
|||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
7 |
|
|
|
Куна |
|
|
|
|
|
|
|
|
|
|
|
Шеделя |
|
|
|
(60 p 1) |
2 |
(100 p 1) |
|||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||
3 |
|
|
|
|
2 |
|
|
Циглера-Никольса |
||
|
|
|
|
|
|
|
|
|
|
Шеделя |
|
|
(1 1 0 p 1) |
2 |
(1 3 0 p 1) |
||||||
|
|
|
|
|||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||
4 |
|
|
|
|
2 |
|
|
Шубладзе |
||
|
|
|
|
|
|
|
|
|
|
Куна |
|
|
(110 p 1) |
2 |
(130 p 1) |
||||||
|
|
|
|
|||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
1 |
|
|
|
Куна |
|
|
|
|
|
|
|
|
|
|
|
Циглера-Никольса |
|
|
(1 0 0 p 1) |
2 |
(1 5 0 p 1) |
||||||
|
|
|
|
|||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
1 |
|
|
|
Шеделя |
|
|
|
|
|
|
|
|
|
|
|
Шубладзе |
|
|
(100 p 1) |
2 |
(150 p 1) |
||||||
|
|
|
|
|||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||
7 |
|
|
|
|
4 |
|
|
Циглера-Никольса |
||
|
|
|
|
|
|
|
|
|
|
Шубладзе |
|
|
(1 1 0 p 1) |
2 |
(1 4 0 p 1) |
||||||
|
|
|
|
|||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||
8 |
|
|
|
|
4 |
|
|
Куна |
||
|
|
|
|
|
|
|
|
|
|
Шеделя |
|
|
(110 p 1) |
2 |
(140 p 1) |
||||||
|
|
|
|
|||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|

Таблица 4.3. Сравнение различных методов настройки ПИД-регуляторов
Метод |
Настроечные |
Передаточная |
Показатели качества |
||||
настройки |
параметры |
функция |
переходного |
||||
ПИД- |
ПИД- |
объекта |
процесса |
|
|||
регулятора |
регулятора |
управления |
|
|
|
||
|
k р |
k и |
k д |
|
t П П , с |
|
% |
|
|
|
|
|
|
|
|
Без настройки |
|
|
|
|
|
|
|
Метод 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(название) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Метод 2 |
|
|
|
|
|
|
|
(название) |
|
|
|
|
|
|
|
Содержание отчета.
1Цель работы.
2Схемы моделирования исследуемой системы регулирования.
3Расчетные формулы и настроечные параметры ПИД-регулятора по каждой методике настройки.
4Полученные графики переходных процессов и их показатели качества.
5Сравнительный анализ методов настройки ПИД-регуляторов.
6Основные выводы по работе.
Контрольные вопросы
1. Что такое регулятор? Какие функции он выполняет? 2. Назовите типовые законы регулирования
3.Запишите передаточную функцию ПИД – регулятора и его уравнение
4.Какой принцип положен в основу настройки ПИД-регулятора по методу Циглера-Никольса?
5.Какой принцип положен в основу настройки ПИД-регулятора по методу Шубладзе?
6.Какой принцип положен в основу настройки ПИД-регулятора по методу Куна?
7.Какой принцип положен в основу настройки ПИД-регулятора по методу Шеделя?
8.Назовите достоинства и недостатки каждого метода настройки