

ПЗ 1
.docxМинистерство науки и высшего образования РФ
ФГБОУ ВО «Кубанский государственный технологический университет»
Кафедра ЭПП
Практическое занятие №1
«Синтез цифровых логических устройств управления автоматизированным электроприводом»
Выполнил:
ст. гр. 00-НМ-ЭЭ0
Иванов И.И.
Проверил:
Печенкин А.Г.
Краснодар 20__
1. Цель и программа работы
Целью работы является изучение организации процесса синтеза устройств управления автоматизированным электроприводом.
В программу работы входит:
изучение релейно-контактной схемы управления электроприводом;
составление произвольной логической формулы работы устройства управления;
приведение произвольной логической формулы к ДСНФ (КСНФ);
запись логической структуры в программируемое реле;
проверка логики работы синтезированного устройства управления;
анализ полученного устройства;
оформление результатов работы.
2. Расчетно-графическая часть
Составить релейно-контакторную схему управления электроприводом, работающим в повторно-кратковременном режиме и реализующим следующую тахограмму:
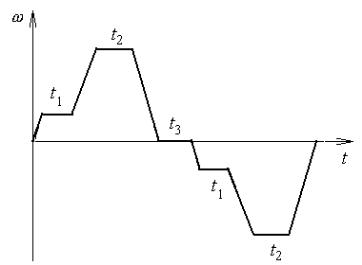
Рисунок 1 – Тахограмма электропривода.
Двигатель постоянного тока, число ступеней пуска m=3, пуск в функции скорости, торможение противовключением в функции времени. Управление от кнопочного поста.
Чтобы построить структурную схему управления в программе ZelioSoft2, составим матрицу состояний системы:
Т а б л и ц а 1 – Матрица состояний системы
Реверс |
Прямой пуск |
КЗ |
Перегрузка |
Перегрев |
Выкл. |
Рабочее состояние |
Х1 |
Х2 |
Х3 |
Х4 |
Х5 |
Х6 |
Y |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
0 |
Продолжение таблицы 1
Х1 |
Х2 |
Х3 |
Х4 |
Х5 |
Х6 |
Y |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
0 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
0 |
0 |
1 |
0 |
1 |
1 |
1 |
0 |
0 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
0 |
0 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
1 |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
1 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
0 |
0 |
1 |
1 |
1 |
0 |
1 |
0 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
0 |
1 |
1 |
0 |
1 |
0 |
1 |
1 |
0 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
1 |
0 |
Продолжение таблицы 1
Х1 |
Х2 |
Х3 |
Х4 |
Х5 |
Х6 |
Y |
1 |
0 |
1 |
1 |
1 |
0 |
0 |
1 |
0 |
1 |
1 |
1 |
1 |
0 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
1 |
0 |
1 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
1 |
0 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
0 |
1 |
0 |
1 |
1 |
1 |
0 |
1 |
0 |
0 |
1 |
1 |
1 |
0 |
1 |
1 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
1 |
0 |
1 |
1 |
1 |
1 |
1 |
0 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
0 |
Получим следующее уравнение для рабочего состояния системы:

Тогда структурная схема в ZelioSoft2 выглядит, как на рисунке 1.
Рисунок
1 – Структурная схема в программе
ZelioSoft2
