

(31) Методы многомерной оптимизации.
Постановка задач многомерной оптимизации
При математической формулировке задачи условной оптимизации целевую функцию выбирают с таким знаком, чтобы решение задачи соответствовало поиску минимума этой функции. Поэтому формулировку общей задачи математического программирования обычно записывают так:

где
 -
множество возможных альтернатив,
рассматриваемых при поиске решения
задачи. Любую точку
-
множество возможных альтернатив,
рассматриваемых при поиске решения
задачи. Любую точку
 называют допустимым решением задачи
математического программирования, а
само множество – множеством
допустимых решений
или допустимым
множеством. Точку
,
в которой функция
называют допустимым решением задачи
математического программирования, а
само множество – множеством
допустимых решений
или допустимым
множеством. Точку
,
в которой функция
 достигает
своего наименьшего значения, называют
оптимальным
решением задачи.
достигает
своего наименьшего значения, называют
оптимальным
решением задачи.
Задачу (1) в дальнейшем будем называть задачей минимизации целевой функции на множестве Q. Но целевая функция может и не достигать на Q наименьшего значения. Тогда говорят о точной нижней грани функции на этом множестве и вместо (1) используют запись:

Отличие этих записей в том, что в первом случае предполагается существование конкретной точки , в которой целевая функция достигает своего наименьшего значения на множестве Q, а во втором случае такая точка может и не существовать.
Сформулируем
задачу многомерной
безусловной оптимизации:
найти минимум функции
 ,
при отсутствии ограничений на x,
при этом
,
при отсутствии ограничений на x,
при этом
 – это скалярная целевая функция,
непрерывно дифференцируемая.
– это скалярная целевая функция,
непрерывно дифференцируемая.
Методы численного решения задач многомерной безусловной минимизации многочисленны и разнообразны. Условно их можно разделить на три больших класса в зависимости от информации, используемой при реализации метода.
1. Методы нулевого порядка, или прямого поиска, стратегия которых основана на использовании информации только о свойствах целевой функции.
2. Методы первого порядка, в которых при построении итерационной процедуры наряду с информацией о целевой функции используется информация о значениях первых производных этой функции.
3. Методы второго порядка, в которых наряду с информацией о значениях целевой функции и ее производных первого порядка используется информация о вторых производных функции.
(32) Методы многомерной оптимизации нулевого порядка.
В методах прямого поиска минимума целевой функции (или методах нулевого порядка) используют информацию только о значениях этой функции.
Рассмотрим 2 метода нулевого порядка:
1. метод Гаусса-Зейделя;
 2.
метод Хука-Дживса.
2.
метод Хука-Дживса.
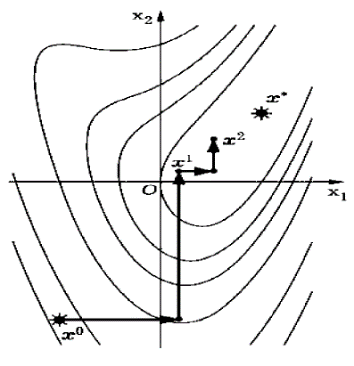
Метод Гаусса – Зейделя (на одной оси ищем минимальное значение, потом на другой)
В
качестве направлений поиска используются
координатные векторы
 Таким
образом, в поиске по направлению меняется
только переменная
Таким
образом, в поиске по направлению меняется
только переменная
 ,
остальные переменные фиксируются.
,
остальные переменные фиксируются.
Задаём
начальную точку
 .
Рассматриваем направление поиска
.
Рассматриваем направление поиска
 .
Находим параметр
.
Находим параметр
 из
условий одномерной минимизации
из
условий одномерной минимизации Обозначим промежуточную точку
Обозначим промежуточную точку
 .
Перейдём ко второму направлению
.
Перейдём ко второму направлению
 .
Находим параметр
.
Находим параметр
 из условия одномерной оптимизации
из условия одномерной оптимизации
 ,
обозначим
,
обозначим
 ,
проходим по всем направлениям координатных
осей, определяя
,
проходим по всем направлениям координатных
осей, определяя
 Следующая точка
Следующая точка
 .
Рассматриваем её как стартовую, далее
повторяем процесс поиска по направлениям
координатных осей. Процесс поиска
останавливаем при выполнении условия
.
Рассматриваем её как стартовую, далее
повторяем процесс поиска по направлениям
координатных осей. Процесс поиска
останавливаем при выполнении условия
 – заданная точность.
– заданная точность.
В
качестве оптимального решения выбираем

Метод Хука-Дживса (тут чуть посложнее, ещё выбираем нужное направление)
Эффективность
прямого поиска точки минимума ограниченной
снизу целевой функции можно повысить,
если на каждом k-м
шаге поиска соответствующим образом
выбирать направление спуска. Для этого
на каждом k-м
шаге выделяют предварительный этап
исследующего
поиска.
Целью этого этапа является выбор
направления спуска путем исследования
поведения целевой функции
в окрестности точки
 ,
найденной на предыдущем шаге. В результате
выполнения этапа исследующего поиска
находится точка
,
найденной на предыдущем шаге. В результате
выполнения этапа исследующего поиска
находится точка
 ,
для которой
,
для которой
 .
Направление спуска, завершающего k-й
шаг поиска, определяется вектором
.
Направление спуска, завершающего k-й
шаг поиска, определяется вектором
 .
.
 Исследующий
поиск
заключается в поиске базовой точки.
Перебираем точки вдоль координатных
направлений, аналогично методу Гаусса
- Зейделя. Если значение целевой функции
в пробной точке не превышает значения
в исходной, то шаг поиска рассматривается
как успешный. В противном случае
необходимо вернуться в предыдущую точку
и сделать шаг в противоположном
направлении. После перебора всех N
координат исследующий поиск заканчивается.
Полученная
точка называется
базовой.
Исследующий
поиск
заключается в поиске базовой точки.
Перебираем точки вдоль координатных
направлений, аналогично методу Гаусса
- Зейделя. Если значение целевой функции
в пробной точке не превышает значения
в исходной, то шаг поиска рассматривается
как успешный. В противном случае
необходимо вернуться в предыдущую точку
и сделать шаг в противоположном
направлении. После перебора всех N
координат исследующий поиск заканчивается.
Полученная
точка называется
базовой.
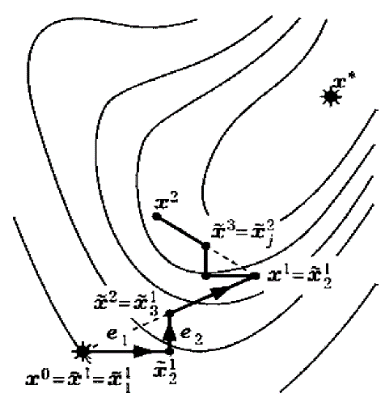
Поиск
по образцу
заключается в реализации единственного
шага из полученной базовой точки вдоль
прямой, соединяющей её с предыдущей
базовой точкой. На k-м
шаге переходим к этапу спуска в направлении
вектора
 ,
при этом
,
при этом
 .
Следующая точка находится по формуле
.
Следующая точка находится по формуле

Ускоряющий
множитель λk
находим методом одномерной оптимизации
 при этом
при этом
 ,
либо задаём постоянным, обычно полагаем
,
либо задаём постоянным, обычно полагаем .
.
На
рисунке иллюстрируются этапы исследующего
поиска и спуска для первых двух шагов
поиска точки минимума целевой функции
двух переменных при
из начальной точки
 .
.