

Учебники 80205
.pdfnон – количество потребителей наружного освещения; nов – количество потребителей внутреннего освещения;
cosϕ –коэффициент мощности в сети [29, прил.14], [47, табл.16.2], [48,табл.10.16];
кс1, кс2, кс3, кс4 –коэффициенты спроса [29, прил.14], [47, табл.16.2], [48, табл.10.16].
|
Расчёт потребности во временном электроснабжении |
Таблица 19 |
|||||||||
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Наимено- |
|
|
Норма расхода |
|
к |
ϕ |
|
|
Потребляемая |
||
вание |
|
|
|
Коэффициент мощностив сети , cos |
|
|
|||||
потреби- |
Количествоединиц потребления электроэнергии |
электроэнергии |
|
4с |
|
Коэффициент потерьмощности к |
мощность, |
||||
|
3с |
|
|||||||||
|
|
|
|
, |
|
|
|
||||
телей, |
р , р , р , р , |
Коэффициенты |
,к |
|
Р Р , Р , Р , |
||||||
энергии |
с пр он |
ов |
спросак |
|
с, |
пр он ов |
|||||
единица |
|
|
кВт / единица |
|
к |
|
|
|
|
кВт |
|
потреб- |
|
|
потребления |
|
с |
|
|
|
|
|
|
|
|
|
1 с |
|
|
|
|
|
|||
|
|
|
|
|
|
, |
|
|
|
|
|
ления |
|
|
электроэнергии |
|
|
|
|
|
|
|
|
электро- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
3 |
|
4 |
5 |
|
6 |
|
7 |
|
На основе |
подсчитанной |
мощности |
Робщ, по |
справочной |
литературе |
||||||
[47, табл.16.4], [48, табл.10.18] подбирается трансформаторная подстанция для временного электроснабжения строительной площадки.
Подводка временной электросети производится по |
воздуху на столбах |
с шагом 40 ÷ 50 м. |
|
Количество прожекторов n для освещения строительного участка |
|
определяется по формуле |
|
n = P E S / Pл, |
(43) |
где P – нормативная удельная мощность (0,25 ÷0,4 Вт / м2 · лк); E – освещённость (0,5 ÷100 Вт / м2 · лк);
S – площадь участка, подлежащего освещению, м2; Pл – мощность лампы прожектора (500, 1000, 1500 Вт).
Прожекторы следует располагать на мачтах по периметру строительной площадки. Высота установки осветительных приборов Hосв зависит от мощности
лампы Pл:
Hосв = 7м – при Pл = 0,5 кВт;
Hосв = 25м – при Pл = 1,5 кВт.
Расстояние между прожекторными мачтами не должно превышать четырёхкратной высоты их установки (30÷100 м).
31
3.2.Проектирование стройгенплана
3.2.1.Размещение монтажных кранов и подъёмников
Размещение монтажных и подъёмных механизмов на строительной площадке производится на основе обеспечения безопасных условий производства работ [5] в соответствии с выбранными технологическими схемами монтажа конструкций.
При проектировании СГП на возведение промышленных зданий размещение монтажных кранов на строительной площадке производиться в соответствии с [26, 27, 28, 29, 31, 35, 39, 47, 48].
При проектировании СГП на возведение жилищных и общественных зданий размещение монтажных механизмов на строительной площадке производиться в соответствии с [29, 31, 35, 38, 39, 40, 47, 48].
Порядок действий при расположении монтажных механизмов на стройгенплане имеет следующий вид:
–поперечная привязка крана;
–продольная привязка крана и подкрановых путей (для башенных кранов);
–расчёт зон действия крана;
–введение ограничений в зону действия крана (при размещении
башенных кранов в стеснённых условиях).
Поперечная привязка монтажных кранов производится исходя из необходимости соблюдения безопасного расстояния между зданием и краном (рис. 3; рис. 5, а), по формулам (44) или (45):
B = Rпов + lбез, |
(44) |
где B – минимальное расстояние от оси движения крана до наружной грани возводимого здания (или ранее смонтированных конструкций), м;
Rпов – радиус поворотной платформы или другой выступающей части крана (рис. 7, рис. 8), (принимается по паспортным данным крана), м;
lбез – минимально допустимое расстояние от выступающей части крана до
наружной грани возводимого здания или ранее смонтированных конструкций, м (lбез = 0,7 ÷ 1,0м).
B = акр /2 + b, |
(45) |
где акр – ширина кранового пути, м (табл. 8), (рис. 3; рис. 5, а);
b– расстояние между ближними друг к другу наружной гранью возводимого здания и осью головки рельса подкранового пути, м (табл. 8), (рис. 3; рис. 5, а).
32
Продольная привязка выполняется только для башенных кранов и заключается в расчёте длины подкрановых путей Lп.п исходя из графического определения точек, соответствующих крайним стоянкам монтажного механизма
(рис. 5).
Графический метод определения крайних стоянок башенного крана на рельсовом ходу заключается в последовательном нанесении на ось передвижения крана засечек в следующем порядке:
–нанесение засечек раствором циркуля, соответствующим
максимальному вылету стрелы lmax, из крайних углов внешнего габарита здания со стороны, противоположной крану (рис. 5, а);
–нанесение засечек раствором циркуля, соответствующим
минимальному вылету стрелы lmin, из середины внутреннего контура здания (рис. 5,б);
–нанесение засечек раствором циркуля, соответствующим требуемому вылету стрелы lстртр согласно грузовой характеристике крана, из центра тяжести наиболее тяжёлых элементов (рис. 5, в);
–определение крайних стоянок крана по крайним засечкам и
расстояния между ними lкр (рис. 5, г). |
|
|
Длина подкрановых |
путей Lп.п определяется по формуле |
(46) или (47) |
(рис.5, д): |
Lп.п = lкр + Hкр + 2 lторм + 2 lтуп |
(46) |
|
||
или приближённо |
Lп.п ≥ lкр + Hкр + 4, |
(47) |
где lкр – расстояние между крайними стоянками крана, м;
Hкр – база крана, м;
lторм – величина тормозного пути крана, м (не менее 1,5 м); lтуп – расстояние от конца рельса до тупиков, м (0,5 м);
4 – сумма величин тормозного пути крана в обоих направлениях (2 по 1,5 м) и расстояния от конца рельса до тупиков (2 по 0,5 м), м.
Полученную величину длины подкрановых путей Lп.п необходимо скорректировать в сторону увеличения с учётом кратности длины полузвена –
6,25 м.
Согласно минимально допустимой длине подкрановых путей, соответствующей длине двух рельсовых звеньев (25 м), окончательно принимаемая величина Lп.п должна удовлетворять следующему условию:
Lп.п = 6,25 nзв ≥ 25, |
(48) |
где 6,25 – длина одного полузвена подкрановых путей, м; nзв – количество полузвеньев;
25 – минимально допустимая длина подкрановых путей, м.
33
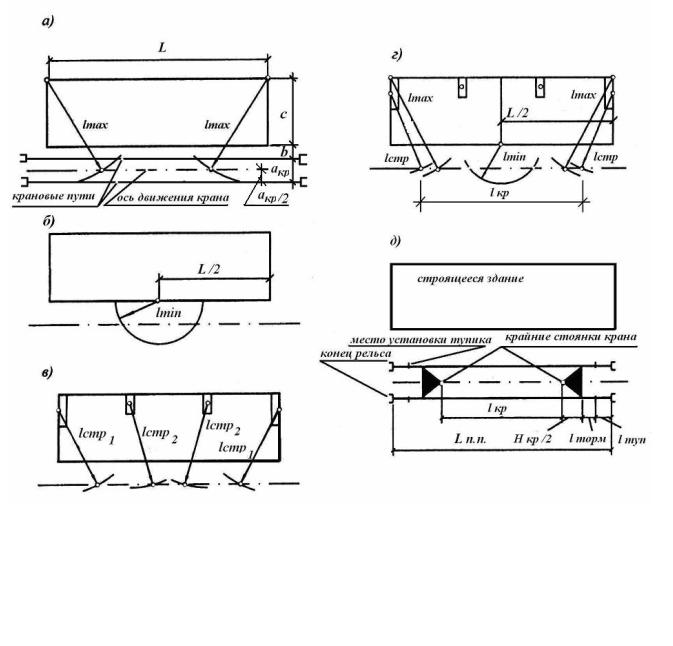
Рис. 5. Схема определения минимальной длины подкрановых путей монтажных кранов на рельсовом ходу: а - определение крайних стоянок из условия максимального вылета стрелы lmax; б - определение крайних стоянок из условия минимального вылета стрелы lmin; в - определение крайних стоянок из условия необходимого вылета стрелы; г - определение крайних стоянок крана; д -
определение минимальной длины подкрановых путей
Для обеспечения условий безопасного ведения работ необходимо определить следующие зоны действия крана (рис. 6, 7, 8 и 10):
–монтажная зона;
–зона обслуживания;
–опасная зона.
Монтажная зона представляет собой часть территории строительной площадки, внутри которой существует потенциальная опасность падения груза при установке и закреплении элементов. Граница монтажной зоны определяется привязкой к контуру здания C (рис. 6, а), величина которой определяется по
формуле
34
С = x2 + b, |
(49) |
где x2 – минимальное расстояние отлёта груза в случае их падения со здания согласно табл. Г.1 [5] или табл. 20, м;
b – наибольший габарит перемещаемого груза, м.
Зона обслуживания представляет собой часть территории строительной площадки, внутри которой существует возможность производить погрузо- разгрузочные работы, зацепление грузов для подачи на монтаж и другие работы, связанные с применением монтажного механизма. Граница зоны обслуживания определяется величиной максимального вылета стрелы крана lmax (рис. 6, б; рис.8,
рис.10).
Опасная зона работы крана представляет собой часть территории строительной площадки, внутри которой существует потенциальная опасность падения груза при его перемещении (рис. 6, в; рис.7, рис. 8, рис. 10).
Границы опасной зоны при перемещении грузов монтажными кранами в соответствии с [5, табл. П.Г.1] определяются величиной радиуса опасной зоны Rоп (рис. 7), рассчитываемой по формуле
Rоп = lmax + 0,5 a + x1 + b, |
(50) |
где Rоп – радиус опасной зоны, м;
lmax – максимальный вылет стрелы крана, м;
a – наименьший габарит перемещаемого груза;
x1 – минимальное расстояние отлёта груза, перемещаемого краном согласно табл. Г.1 [5] или табл. 20;
b – наибольший габарит перемещаемого груза.
Схема для определения границ зоны обслуживания и опасной зоны при работе башенного крана представлена на рис. 8.
Опасная зона работы подъёмника представляет собой часть территории строительной площадки, внутри которой существует потенциальная опасность падения поднимаемого груза (рис. 6, в; рис. 9). Привязка границы опасной зоны к габаритам подъёмника А принимается равной:
при Нпод ≤ 20 м |
– |
А = 5 м; |
|
при Нпод > 20 м |
– |
на каждые 15 м подъёма следует добавлять по 1 м, т.е.: |
|
|
|
А = 5 + (Нпод – 20) / 15, |
(51) |
где А – привязка границы опасной зоны к габаритам подъёмника, м; Нпод – высота подъёма груза, м.
35
|
|
Таблица 20 |
|
Данные для определения зон действия монтажных кранов |
|||
|
|
|
|
Высота возможного |
Минимальное расстояние |
||
падения груза (предмета), |
отлета груза (предмета), м |
||
(высота здания Нзд), м |
|
|
|
перемещаемого краном |
предметов в случае их |
||
|
|||
|
груза в случае его |
падения со здания |
|
|
падения (x1) |
(x2) |
|
|
|
|
|
До 10 |
4 |
3,5 |
|
» 20 |
7 |
5 |
|
» 70 |
10 |
7 |
|
» 120 |
15 |
10 |
|
» 200 |
20 |
15 |
|
» 300 |
25 |
20 |
|
» 450 |
30 |
25 |
|
Примечание — При промежуточных значениях высоты возможного падения грузов |
|||
(предметов) минимальное расстояние их отлета допускается определять методом |
|||
интерполяции |
|
|
|
Опасные зоны дорог, подъездов, подходов – это часть территории строительной площадки в пределах опасной зоны работы крана, где осуществляется движение транспортных средств, работа других механизмов или могут находиться люди, не участвующие в работе с краном. Эти зоны на СГП необходимо выделять особо и обозначать с помощью штриховки (рис. 10).
При привязке башенных кранов в стеснённых условиях возникает необходимость введения ограничений в их работу (ограничения поворота стрелы, вылета стрелы, передвижения крана). Различаются принудительные и условные ограничения.
Принудительные ограничения заключаются в установке датчиков и концевых выключателей, обеспечивающих аварийное отключение крана в заданных пределах.
Условные ограничения рассчитаны на внимание и опыт крановщика, стропальщиков, монтажников и представляют собой условное обозначение строительной площадки предупреждающими сигналами: днём – красными флажками, в тёмное время суток – красными гирляндами из ламп и фонарей.
Размещение сигналов с указанием способа их исполнения необходимо отразить на СГП.
Дополнительные рекомендации по размещению монтажных кранов, подъёмников, по введению ограничений в их работу, а также сведения об условных обозначениях на СГП смотри в [29, 35, 38, 39, 40, 47,48].
36
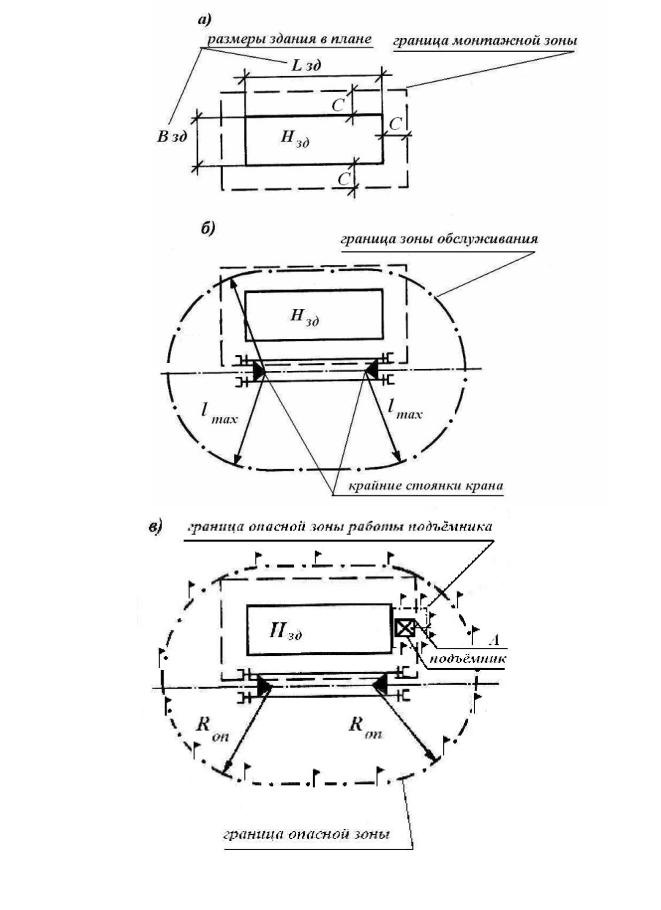
Рис. 6. Схема определения зон действия башенного крана при возведении надземной части здания: а - монтажной зоны; б - зоны обслуживания; в - опасной зоны
37
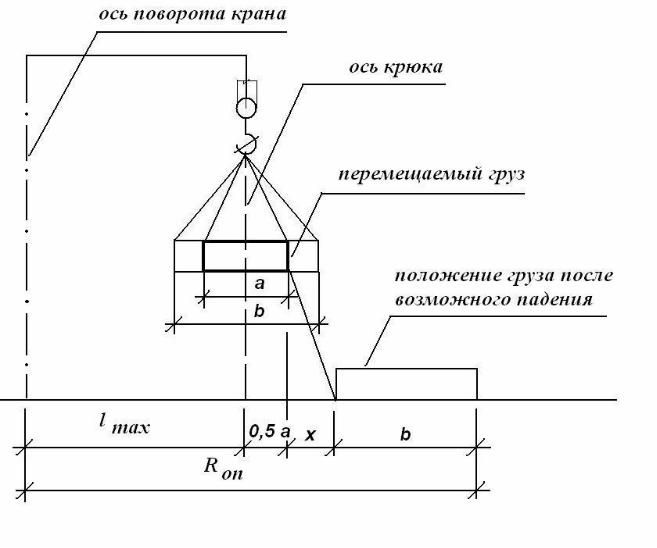
Рис.7. Схема для определения границы опасной зоны перемещаемого краном груза:
Rоп – радиус опасной зоны;
lmax – максимальный вылет стрелы крана;
a– наименьший габарит перемещаемого груза;
b– наибольший габарит перемещаемого груза;
x– минимальное расстояние отлёта груза согласно [5, табл. П. Г.1] или табл. 20
38
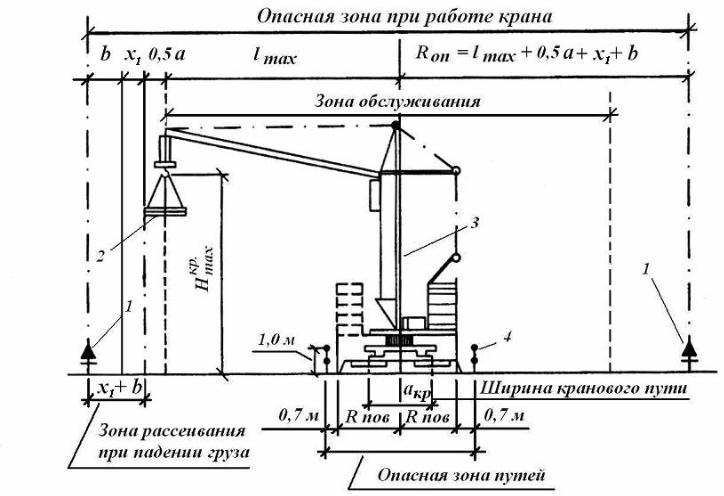
Рис. 8. Схема для расчета зон башенного крана:
1 – знак по технике безопасности на границе опасной зоны;
2 – груз;
3 – ось подкрановых путей (ось поворота крана);
4 – ограждение подкрановых путей
39

Рис.9. Схема определения опасной зоны при работе грузового подъёмника:
1 – подъёмник; А – привязка границы опасной зоны при работе подъёмника
Рис.10. Схема размещения элементов СГП внутри опасной зоны работы крана на рельсовом ходу: 1 – строящееся здание; 2 – площадка для складирования; 3 – площадка для разгрузки автотранспорта; 4 – площадка для приёма раствора; 5 – место нахождения контрольного груза; 6 – место хранения грузозахватных приспособлений и тары; 7 – стенд со схемами строповки грузов; 8 – шкаф электропитания крана
40