

Учебники 80178
.pdfк.п.д. датчика, т.к. неизбежны потери энергии в конструкции и в согласующих элементах датчика.
Таким образом, к.п.д. характеризует связь энергетических параметров с такими метрологическими параметрами как чувствительность и порог чувствительности. Эти метрологические параметры значительно зависят от к.п.д. у генераторных преобразователей, применяемых в фотодатчиках, пьезодатчиках, термодатчиках и др.
4. ЭЛЕКТРИЧЕСКИЕ ЦЕПИ ДЛЯ ИЗМЕРЕНИЯ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
Измерительные электрические цепи применяются в измерительных каналах и в измерительных приборах для измерения неэлектрических величин. Эти цепи подразделяются на два структурных класса – цепи прямого преобразования и цепи уравновешивающего преобразования. Цепи прямого преобразования более просты и надежны, благодаря чему при технических измерениях они применяются чаще.
В свою очередь, измерительные цепи прямого преобразования делятся на две группы:
−цепи для работы с параметрическими преобразователями н.э.в.;
−цепи для работы с генераторными преобразователями н.э.в.
При использовании параметрических преобразователей следует различать три вида цепей:
−цепи последовательного включения преобразователей;
−цепи в виде делителей (тока, напряжения, светового, теплового, магнитного, ионизационного и других потоков);
−цепи в виде неравновесных мостов (электрических, магнитных, оптических и др.).
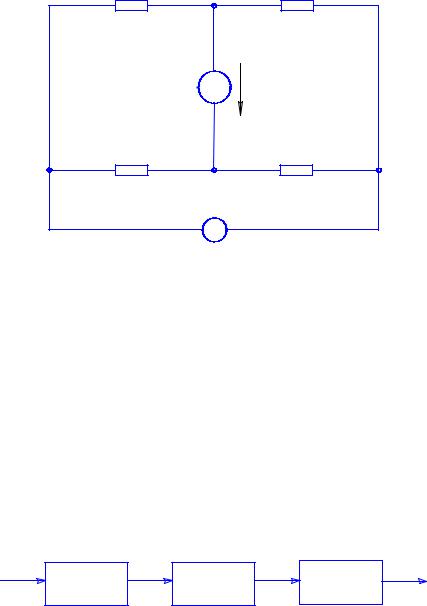
Рассмотрим последовательную схему с параметрическим преобразователем на примере прибора для измерения скорости газов (термоанемометра) (рис. 2).
E
V R
I Rc
Рис. 2
10
Датчик представляет собой платиновую проволоку с сопротивлением R, которая с помощью проводов включена в электрическую сеть и нагревается током I, идущим от источника Е. При протекании тока I по рамке измерительного механизма его стрелка отклоняется. Символом Rc обозначено суммарное сопротивление проводов, измерительного механизма и источника питания.
В рассматриваемом термоанемометре можно выделить следующие элементарные преобразователи, включенные последовательно:
1 – нагретая проволока, преобразующая V потока, например, воздуха в изменение температуры t;
2– та же проволока, выполняющая функцию термометра сопротивления
ипреобразующая изменение температуры в изменение сопротивления R;
3 – электрическая цепь, преобразующая изменение сопротивления R в изменение тока I;
4 – измерительный механизм, преобразующий изменение тока I в изменение отклонения стрелки прибора α .
При последовательном соединении преобразователей чувствительность схемы будет равна произведению чувствительностей, входящих в него преобразователей:
S = S1 S2 S3 S4.
Для определения проходной функции преобразования схемы должны быть известны функции преобразования отдельных преобразователей.
Функция преобразования первого преобразователя представляет собой зависимость температуры проволоки термоанемометра t от скорости воздушного потока V и выражается аналитической зависимостью, которую обозначим
t = f (V ) .
Функция преобразования второго преобразователя является зависимость сопротивления платиновой проволоки R от температуры t и выражается уравнением
R = R0 (1+αt) ,
где R0 – ее сопротивление при 0оС, α - температурный коэффициент сопротивления.
Функция преобразования третьего преобразователя – зависимость тока I в цепи от значения сопротивления R:
α = Sпр I ,
где Sпр – чувствительность магнитоэлектрического миллиамперметра. Функция преобразования всего прибора (схемы) получается путем по-
следовательной подстановки функций преобразования элементарных преобразователей в функцию преобразования последнего (четвертого) преобразователя:
α = SпрI = |
SпрE |
= |
SпрE |
|
= |
SпрE |
|
. |
|
[Rc + Ro (1 |
+αt)] |
(Rc + Ro [1+αf (V )] |
|||||
|
R + Rc |
|
|
|||||
11
Это выражение определяет зависимость отклонения стрелки прибора от измеряемой скорости воздушного потока.
Погрешность прибора будет равна сумме пересчитанных к выходу погрешностей всех входящих в него преобразователей.
Преимуществом приборов с последовательным соединением преобразователей является их простота. Недостатком – довольно большие погрешности. Последние могут быть особенно велики при нелинейных функциях преобразования отдельных звеньев.
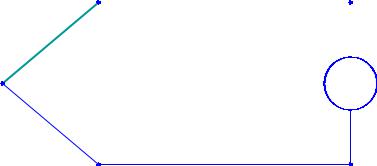
Рассмотрим схему неравновесного моста с параметрическим преобразователем на примере тензорезистивных преобразователей деформации (рис. 3).
R1=R0+R |
R2=R0 |
И Iи
R3=R0 |
R4=R0 |
E
+ = -
Рис. 3
В одно плечо моста включен тензорезистор R1, наклеенный на деформируемую деталь. Параметры моста выбраны такими, что при отсутствии деформации (R1=R0) мост уравновешен, т.е. Iи=0. При наличии деформации сопротивление тензорезистора R1 изменяется ( R1=R0+ ∆R), а сопротивления остальных плеч моста остаются неизменными. При этом равновесие моста нарушается и в выходной диагонали моста возникает ток Iи, зависящий от величины приращения сопротивления ∆R , а следовательно и от деформации.
Рассматриваемая мостовая схема может быть представлена структурно в виде последовательного соединения трех преобразователей: тензопреобразователя (ТП), моста (М) и индикатора (И) (рис. 4).
Єl |
ТП |
ЄR |
М |
І |
|
|
И |
Рис. 4
12

Каждый из этих звеньев характеризуется определенной чувствительностью:
SТП = |
εR = |
∆R / R0 |
, |
|
εl |
∆l /l |
|
где ∆R / R0 − относительное изменение сопротивления тензорезистора,
∆l / l − относительное изменение его длины.
Полная чувствительность всей измерительной цепи определится как произведение чувствительностей всех звеньев:
S= α = SТП SМI SИ ,
εl
где α − показание индикатора (высоко чувствительного гальванометра постоянного тока);
SТП – чувствительность тензорезистора к деформации; SМI – чувствительность мостовой схемы по току;
SИ – чувствительность индикатора по току.
Чувствительности SТП и SИ являются постоянными и зависят от типов применяемых тензорезисторов и индикаторов.
Чувствительность SМI при малых значениях εR , т.е. при значениях де-
формаций в пределах упругих деформаций, можно считать линейной и постоянной и определить по формуле
SМI = 4(R0 E+ RИ ) ,
где R0 – сопротивление тензорезистора при отсутствии деформации; RИ – внутреннее сопротивление индикатора;
Е – напряжение (э.д.с.), приложенное к генераторной диагонали мостовой схемы.
Достоинства мостовых схем включения параметрических преобразователей перед схемами прямого преобразования:
−при наличии разных знаков деформации чувствительность мостовой схемы увеличивается в 2 раза и в 4 раза при двух и четырех рабочих тензорезисторах соответственно;
−включение с соседнее плечо моста аналогичного тензорезистора, не подвергающегося деформации, позволяет осуществить компенсацию влияния изменений температуры на напряжение или ток в выходной диагонали моста, т.е. уменьшить температурную погрешность;
−мостовые схемы позволяют уменьшить нелинейность проходной функции, и тем самым увеличить рабочий диапазон, за счет уменьшения погрешности линейности.
При использовании генераторных преобразователей н.э.в. измерительные цепи могут быть как очень простыми, так и достаточно сложными.
Основным принципом наиболее эффективного построения измерительных цепей с генераторными преобразователями н.э.в. является принцип согласования сопротивлений (рис. 5).
13
|
r |
|
Tо |
|
|
|
mV |
|
Ri |
|
RПР |
r
Рис. 5
Так, для получения рамкой милливольтметра mV с сопротивлением RПР наибольшей мощности от термопары с сопротивлением Ri необходимо, чтобы RПР=Ri. При этом необходимо обратить внимание на то, что максимальную мощность желательно получить именно в нагрузке (в рамке милливольтметра, поэтому сопротивления подводящих проводов 2r должны быть отнесены к Ri, а не к RПР. При этом напряжение на рамке прибора равно
|
|
RПР |
|
VПР = E |
|
. |
|
R + 2r + R |
|||
|
i |
ПР |
|
Следует также учесть, что шкалу милливольтметра можно градуировать в температуре при условии строгого постоянства значений Ri и r. В противном случае их изменение будет вызывать большие погрешности измерения температуры. В случае необходимости использования разных термопар с одним указателем необходимо обеспечивать условие
Ri + 2r = const
вне зависимости от длины линии и сопротивления самой термопары. В этом случае поступаются условием оптимального согласования по мощности и идут на значительное понижение чувствительности ради удобства эксплуатации.
К генераторным преобразователям также относятся индукционные датчики угловой скорости вращения объектов (тахометры), частота и э.д.с. которых пропорциональны частоте вращения, т.к. принцип их действия основан на законе электромагнитной индукции.
Индукционный метод применяется также для измерения расхода воды и электропроводящих жидкостей. Этот метод основан на возникновении э.д.с. в электропроводящей жидкости при движении ее в поперечном магнитном поле. При движении жидкости, например, в цилиндрическом трубопроводе диаметром D в постоянном магнитном поле, индуцируемая э.д.с. равна
E = BDυ ,
где В – магнитная индукция, υ − скорость потока жидкости.
14
В переменном магнитном поле индуцируется переменная э.д.с.
e = Bm Dυsinωt .
Для градуировки прибора в единицах расхода жидкости должно быть известно с достаточно высокой точностью сечение трубопровода в месте установки электродов.
5. ОЦЕНКА РЕЗУЛЬТИРУЮЩИХ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЬНЫХ КАНАЛОВ
При оценке результирующей погрешности измерительного канала из последовательно соединенных звеньев не всегда корректно простое суммирование погрешностей его звеньев. Это связано с разным характером самих погрешностей и как следствие с различными способами их нормирования.
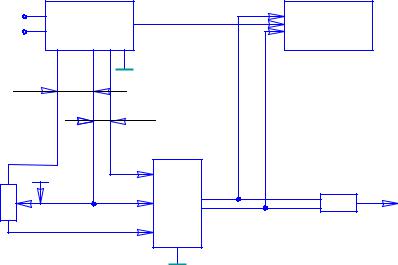
На рис. 5 приведена структурная схема измерительной установки, собранная из следующих элементов: реостатный датчик Д, усилитель У, регистратор Р, цифровой измерительный прибор ЦИП. Неэлектрическая величина Хнэв, воздействует на подвижный контакт проволочного реостата.
g220 |
Блок питания |
Р |
|
|
UД |
|
|
|
UУ |
|
|
|
Хнэв |
|
к ЭВМ |
Д |
У |
ЦИП |
Рис. 6
Исходные данные:
сопротивление датчика RД = 200 Ом; число витков N = 70;
предал его приведенной погрешности γД = 0,2 %;
коэффициент стабилизации источника питания К=25; относительная нестабильность коэффициента усиления усилителя (У)
по напряжению не превышает δУ =+0,5 %; 15

изменение температуры на 100С приводит к смещению его нуля
δОУ =+0,2 %;
коэффициент усиления усилителя КУ=10.
В качестве регистратора применен автоматический потенциометр класса точности 0,5. Время прохода регистратором всей шкалы (от 0 до ХВ) составляет не более 2 с. Изменение температуры на 100С вызывает смещение нуля регистратора на δОР =+1 %. Цифровой вольтметр имеет класс точности 0,2/0,1.
Установка питается от рабочей сети 220 В, 50 Гц с нестабильностью напряжения +15 %.
Объект испытаний, на котором установлен датчик, находится в цехе или ангаре, где обычно поддерживается 200С, но летом может достичь +350С, а зимой падать до +50С.
Усилитель, регистратор и ЦИП установлены в лаборатории, где температура колеблется в пределах от +17 до +250С.
В качестве электрической линии связи используются три жилы неэкранированной стандартной проводки, проложенной по траншеи цеха, каждая жила имеет сопротивление 2 Ом. Напряжение наводки промышленной частоты 50 Гц, измеренное между проводом линии (обычно проводом, соединенным с подвижным контактом датчика) и одной из потенциальных жил, с помощь электронного вольтметра с входным сопротивлением 1 Мом, составляет 1,0 В.
Оценим составляющие суммарной погрешности.
1. Погрешность от сетевой наводки на линию связи.
При измерении напряжения наводки электронным вольтметром, подключенным вместо одного плеча датчика, через него проходил ток
I = 1МОм10В =1 10−6 А. При замыкании линии на датчик, падение напряжения на нем составит Uн = RД I = 0,2мВ. Приведенный уровень наводки к максимальному
напряжению (сигналу) с датчика, равному 0,2 В будет γнав = Uн 100% = 0,1% .
Uс
Так как вольтметр измеряет действующее (среднее квадратическое) значение, то полученная оценка погрешности от наводки, есть также средняя квад-
ратическая (σнав = 0,1% ). Ее максимальное значение σ max=σнав 
 2 = 0,141% , а закон
2 = 0,141% , а закон
распределения – арксинусный. Причем напряжение наводки возрастает линейно с ростом входного напряжения усилителя, т.е. эта погрешность имеет характер погрешности чувствительности.
2. Основная погрешность датчика задана по паспорту максимальным значением γД =+1 %. Для оценки среднего квадратического отклонения (с.к.о.)
необходимо знать закон распределения этой погрешности. Очевидно, что основная составляющая γД - есть погрешность дискретности, обусловленная чис-
лом витков его обмотки. Такая погрешность имеет равномерное распределение.
16

Тогда γД =1% можно считать половиной ширины этого распределения, а с.к.о.
σД =γД 
 3 =1,73% , и имеет характер аддитивной погрешности.
3 =1,73% , и имеет характер аддитивной погрешности.
3.Температурная погрешность датчика. Температурная погрешность датчика равна нулю, т.к. коэффициент деления напряжения 0,2 В не зависит от температуры (при отсутствии температурного градиента обмотки) и определяется отношением числа витков обоих плеч датчика. Но в нашем случае датчик с
RД = 200 Ом соединен последовательно с двумя жилами из медного провода линии сопротивлением 2 Ом каждая. При сезонном изменении температуры в
цехе в пределах (20+15)0С |
и температурным коэффициентом |
меди |
||||
α =+4%/100С |
изменение |
сопротивления |
двух |
жил |
составит |
|
∆R = ∆Q α 2R = 0,24 Ом, что по отношению к RД=200 Ом составит 0,12 |
%, т.е. |
|||||
величину, соизмеримую с другими погрешностями.
Для перехода от максимального значения этой погрешности к с.к.о., при предельных отклонениях температуры до 50С или до 350С, необходимо знать закон распределения температуры в цехе. Обычно температура в течение года распределена по нормальному закону, т.е. только 10-15 дней в году бывает ниже +50С и 10-15 дней – выше +350С, а остальные 365-30=335 дней, т.е. 335/365=0,9 случаев не выходит за эти пределы. По таблице для нормального распределения доверительной вероятности 0,9 соответствует доверительный интервал шириной +2σ . Отсюда искомая погрешностьσЕД =0,12/2=0,06 %. Сле-
дует заметить, что если подвижный контакт находится в среднем положении, то эта погрешность отсутствует. При крайнем положении контакта эта погрешность, имеющая характер аддитивной (погрешность смещения нуля) оказывается соизмеримой с другими составляющими.
4. Погрешность датчика от нестабильности напряжения питания. Эта погрешность имеет чисто мультипликативный характер. Закон распределения колебаний сети обычно близок к треугольному распределению. Стабилизатор уменьшает нестабильность напряжения сети 220 В+15% в К=25 раз, т.е. на в ы- ходе стабилизатора размах нестабильности питания составит 15%/25=0,6 %, с.к.о. напряжения питания датчика для треугольного распределения
σ= γ6 = 0,66 = 0,245% .
5.Погрешность от нестабильности коэффициента усиления усилителя. Эта погрешность мультипликативного характера и распределена также по тре-
угольному закону, т.к. вызвана нестабильностью напряжения питания UУ. Ее максимальное значение составит
γУД =σУ ККу = 0,5% 1025 = 0,2 , а σиу = 0,62 = 0,08%.
6. Температурная погрешность смещения нуля усилителя. Эта погрешность является аддитивной, а закон изменения температуры в лаборатории, где установлен усилитель, обычно считают равномерным со средним значением 220С и размахом +50С. Максимальное значение этой погрешности (при
17
δОУ = +0,2% /100 С) составит γоу = 0,2%(50 С/100 С) = 0,1% , а |
σоу = |
0,1 |
≈ 0,06% при |
||
|
|
|
|||
3 |
|
||||
|
|
|
|
||
равномерном законе распределения.
7. Основная погрешность потенциометра с регистратором.
Предел приведенной погрешности, равный его классу точности, определяется, прежде всего, погрешностью реохорда и всегда аддитивен. Закон распределения, как и у реостатного датчика равномерный с шириной +0,5%. Тогда
с.к.о. составит σоу = 0,35 ≈ 0,3% .
8. Температурная погрешность регистратора проявляется в виде смещения нуля на величину δор = 10−10%С , также аддитивна и, при принятом выше равномерном законе распределения температуры в лаборатории в полосе +50С, ее
1% |
|
5 |
|
|
||
с.к.о. составит σор = |
|
|
× |
|
|
≈ 0,3% . |
|
|
|||||
3 |
|
|||||
|
|
10 |
|
|
||
9. Погрешность цифрового прибора, работающего в режиме вольтметра, нормирована двухчленной формулой. Первая составляющая 0,2 % не зависит от значения измеряемого напряжения и характеризует предел относительной мультипликативной погрешности, вторая – зависит от отношения верхнего значения поддиапазона и значения измеряемой величины и характеризует предел относительной аддитивной погрешности.
Максимальное напряжение с выхода усилителя U =Um ky = 0,2B 10 = 2B . Это напряжение можно измерять на пределе вольтметра Uпр=10 В. Относитель-
|
|
U |
|
|
ная погрешность определится по формуле UB = a +b( |
|
) % . Для минимально- |
||
U −1 |
||||
|
|
|
||
го выходного напряжения, снятого с одного |
витка |
датчика (w=70 Вит.) |
||
Umin = 0,2B / 70 ≈ 3 мВ и усиленного в 10 раз, относительная погрешность вольтметра на Uпр=0,1 В составит δ UН ≈ 0,44% . Абсолютная максимальная погреш-
ность измерения U=2В, будет ∆2В =δВ 100UB = 0,012 В, а приведенная
γmax = ∆2B /UB = 0,12% .
Для перехода от максимальной погрешности к с.к.о. необходимо знание закона распределения этой погрешности. Обычно у цифровой измерительной техники суммарная погрешность формируется как композиция законов распределения погрешностей квантования, компаратора, аналоговых цепей и других элементов схемы. У рабочих приборов низкой и средней точности распределение погрешности можно считать близким к равномерному и
σцв =γмах / 
 3 = 0,07% . Таким образом, оценены все составляющие основных и до-
3 = 0,07% . Таким образом, оценены все составляющие основных и до-
полнительных погрешностей аналогового и цифрового каналов и разделены на аддитивные и мультипликативные составляющие с учетом законов их распределения.
18
10. Оценка результирующей погрешности измерительного канала с аналоговым регистратором. Оценка – этой погрешности сводится к вычислению суммарной приведенной погрешности при входной величине Хнэв=0, которая складывается из аддитивных составляющих, и в конце диапазона, из аддитивных и мультипликативных составляющих. Выбор метода суммирования зависит от того, являются ли суммируемые составляющие погрешностей коррелированными или независимыми. Коррелированными будут погрешности, вызванные одной и той же причиной, а поэтому имеют одинаковую форму закона распределения, которая не изменяется при их алгебраическом суммировании. Так очевидно, что коэффициент усиления усилителя с увеличением напряжения питания возрастает т.е. погрешность σиу положительна. Также положительной
будет погрешность от колебаний напряжения питания датчика σид . Поэтому результирующее значение этих погрешностей равно их сумме
σи(д+у) =σи = [σид +σиу ]= 0,245 +0,08 ≈ 0,26% ,
азакон распределения этой суммарной погрешности сохраняется треугольным. Температурная погрешность усилителя положительно, т.к. с ростом
температуры падение напряжения на переходе база-эмиттер падает, а напряжение на выходе растет. Температурная же погрешность регистратора дана как отрицательная, следовательно,
σв = [σву −σвр ]= 0,06 −0,03 = 0,03% .
После учета корреляционных связей, все полученные погрешности можно суммировать как независимые.
Погрешность аналогового канала в начале диапазона (при Хнэв=0) складывается из четырех аддитивных составляющих σд,σр,σад,σв( у+ р) . Двумя послед-
ними составляющими можно пренебречь, тогда с.к.о. погрешности нуля определится как
σв = 
 σл2 +σр2 =
σл2 +σр2 = 
 1,732 +0,32 ≈1,77% .
1,732 +0,32 ≈1,77% .
Обе суммарные составляющие σд,σр распределены равномерно, поэто-
му результатирующее распределение в общем случае будет трапецеидальным. При этом максимальную приведенную погрешность необходимо опре-
делять с учетом «веса» дисперсии второго слагаемого, т.е. с учетом
q = σд2 = 0,027 . При незначительном весе второго слагаемого (при q<<1) компо-
σр2
зиционный закон оказывается очень близок к исходному равномерному закону распределения для σд . Поэтому вполне допустимо применение соотношения
между приведенной погрешностью и с.к.о. как для равномерного, т.е. γн =σ0 
 3 ≈ 3% . Для расчета погрешности в конце диапазона к полученному значению σ0 ≈1,77% нужно добавить мультипликативные составляющие σи и σнав .
3 ≈ 3% . Для расчета погрешности в конце диапазона к полученному значению σ0 ≈1,77% нужно добавить мультипликативные составляющие σи и σнав .
В общем случае все эти погрешности должны быть просуммированы поочередно. Однако на нашем примере погрешностями от колебаний напряжения пита-
19