

Учебное пособие 800484
.pdfсчет увеличения Р2 , но одновременно быстрее Р2 возрастают переменные потери Рпер . Поэтому при некотором токе Iкр
рост КПД прекращается и в дальнейшем он начинает уменьшаться.
Коэффициент мощности двигателя cos 1 можно определить по схеме замещения АД (см. рисунок 3.3), зная значение активной составляющей тока статора Iа и входящее сопротивление схемы замещения Z :
cos |
|
IaZ |
|
|
|
|
(3.6) |
|
U1н |
|
|
|
|
||||
1 |
|
|
|
|
|
|
|
|
или |
|
|
Ia Ioa |
|
|
|
|
|
cos 1 |
|
|
|
, |
(3.7) |
|||
I 1 2R R |
|
|
||||||
|
|
1 |
1 |
|
|
|
||
где R – активное сопротивление намагничивающего
контура схемы замещения.
При переходе от режима холостого хода к режиму номинальной нагрузки коэффициент мощности возрастает от значения cos 1 0,08...0,15 до некоторой максимальной величины, равной; для двигателей мощностью от 1 до 100 кВт (0,7…0,9). При дальнейшем росте нагрузки cos 1 несколько уменьшается, что объясняется тем, что при возрастании механической нагрузки на валу уменьшается активная составляющая тока ротора I2 и увеличивается частота тока в роторе f2 f1S и его индуктивное сопротивление X2S .
91
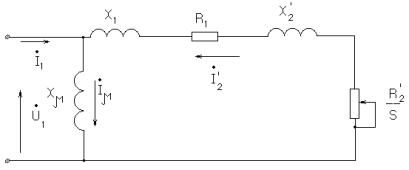
Рис. 3.3. Схема замещения одной фазы асинхронного двигателя
Работа асинхронного двигателя при малых нагрузках, когда cos 1 мал, в энергетическом отношении невыгодна. В случаях, когда двигатель работает с изменяющейся нагрузкой, целесообразно для повышения коэффициента мощности при степени нагрузки до 50 % от номинальной уменьшать напряжение, подаваемое на фазы обмотки статора (например, путем переключения с на Y). В этом случае уменьшается магнитный поток машины, а, следовательно, и реактивная мощность.
2.2. Работа асинхронного двигателя при неноминальных условиях
2.2.1. Изменение напряжения Обычно АД рассчитывают так, чтобы при
номинальном режиме КПД и cos 1 у них были близки к максимальным. С другой стороны, максимум КПД имеет место при Рпост Рпер . При увеличении напряжения
происходит возрастание магнитного потока, а, следовательно, увеличение тока холостого хода и магнитных потерь в стали. Вследствие этого КПД и cos 1 уменьшаются.
92
Уменьшение напряжения опасно тем, что пропорционально квадрату напряжения изменяется Мmax и при большом моменте нагрузки может произойти нарушение устойчивости двигателя. Колебания напряжения по ГОСТ 32144-2013 должны быть ограничены от -5 до +10 %. При одновременном отклонении частоты и напряжения асинхронный двигатель должен отдавать номинальную мощность, если сумма процентных отклонений этих параметров не превосходит 10 % (без учета их знаков).
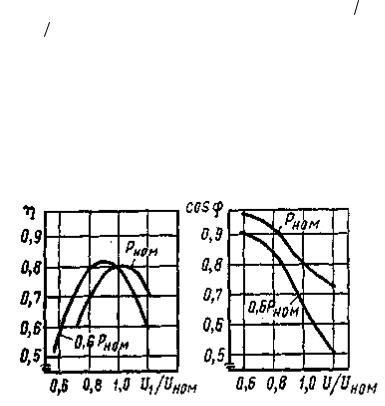
На |
рис. |
3.4 показаны зависимости f U |
Uн и |
cos f U |
Uном |
при двух значениях мощности Рн и |
0,6Рн , |
для двигателя мощностью 1,5 кВт при 3000 об/мин. Из этих кривых следует, что при допустимых стандартом отклонениях напряжения от номинального КПД при Р2н
уменьшается на 2 %, а при Р 0,6Рн и U 1,1Uном – на 8 %. При этом наихудший и довольно часто встречающийся случай – работа недогруженного двигателя при 1,1Uном дает максимальное уменьшение cos 1 на 24 %.
а) б)
Рис. 3.4. Зависимости КПД и cosφ от коэффициента регулирования напряжения
93
При частичной нагрузке, когда нет угрозы нарушения устойчивости, уменьшение напряжения позволяет увеличить КПД и cos 1, т.к. пропорционально напряжению уменьшается магнитный поток Фm, ток холостого хода I0 и магнитные потери Pмаг. Из рассмотрения рис. 4 следует, что каждой нагрузке соответствует свое оптимальное значение напряжения, при котором постоянные потери равны переменным. Чем меньше нагрузка, тем меньше это оптимальное напряжение.
Таким образом, желательно при частичных нагрузках снижать напряжение питания для того, чтобы КПД и cos 1 поддерживать на высоком уровне.
Для рассмотрения влияния изменения напряжения на рабочие характеристики АД изучим это влияние на зависимости при U var. Согласно схеме замещения (см. рис. 3.3):
|
|
|
|
I |
|
|
|
|
|
I |
0 |
cos |
0 |
I |
cos |
2 |
|
|
|
|
|
|
cos 1 |
|
|
1a |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
I0 cos 0 I2 cos 2 2 I0 sin 0 |
I2 sin 2 2 |
|||||||||||||||
|
|
|
|
I12a I12p |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.8) |
||
Пренебрегая активными потерями при холостом ходе ( |
||||||||||||||||||||||
sin 0 1) и вводя относительные величины, получим: |
||||||||||||||||||||||
cos 1 |
|
|
|
|
|
|
|
|
|
I2н M* Ки |
|
|
|
|
|
|
|
|
, |
(3.9) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
I0нКи I2н M*2 2MmaxКи3 2 |
I2н М* |
Ки 2 |
|||||||||||||||||||
где Ки U1 U1н |
– коэффициент регулирования напряжения. |
|||||||||||||||||||||
На рис. 5а и 5б приведены теоретические |
||||||||||||||||||||||
характеристики |
|
и |
cos от коэффициента регулирования |
|||||||||||||||||||
напряжения для указанного выше электродвигателя при различных значениях нагрузочного момента М*.
Из рассмотрения этих зависимостей вытекает, что наиболее целесообразной мерой является регулирование напряжения по законам, обеспечивающим максимум или
94

при cos 1 cos 1ном . При регулировании напряжения по максимальному значению cos 1 КПД оказывается значительно ниже, чем при других законах регулирования.
а) |
б) |
Рис. 3.5. Зависимости КПД и cosφ от нагрузки
Проще всего осуществить уменьшение напряжения при снижении нагрузки путем переключения обмотки статора со схемы на схему Y. На рис. 3.6а, 3.6б, 3.6в показаны рабочие характеристики АД при таком переключении.
95

а) б) в) Рис. 3.6. Рабочие характеристики при различных схемах
обмоток АД
Степень загрузки двигателя Р2  Р2н , при которой целесообразно переключать обмотку его статора, определяется путем расчета или экспериментально. Значительную экономию электроэнергии может дать управление частотой вращения электродвигателей вентиляторов, насосов, компрессоров и т.д., где используется до 60 % всех выпускаемых асинхронных электродвигателей. Экономия электроэнергии при регулировании частоты вращения таких механизмов может быть более 50 %.
Р2н , при которой целесообразно переключать обмотку его статора, определяется путем расчета или экспериментально. Значительную экономию электроэнергии может дать управление частотой вращения электродвигателей вентиляторов, насосов, компрессоров и т.д., где используется до 60 % всех выпускаемых асинхронных электродвигателей. Экономия электроэнергии при регулировании частоты вращения таких механизмов может быть более 50 %.
2.2.2. Обрыв фазы обмотки статора В рассматриваемом случае систему несимметричных
напряжений принято раскладывать на симметричные составляющие прямой, обратной и нулевой последовательностей. Проанализируем влияние каждой на работу двигателя. На рис.3.7 показаны схемы замещения асинхронного двигателя для токов прямой и обратной последовательности.
96

a) |
rSA xSA |
|
|
xRA |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rRA |
|
|
|
IA1 |
|
|
|
-IRA1 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
xmA |
|
|
|
|
s |
|||||||
zA1 |
|
ImA1 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
rSA xSA |
|
|
xRA |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
rRA |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
IA2 |
|
|
-IRA2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
2-s |
|||||||
zA2 |
|
|
ImA2 |
|
xmA |
|
|
|
|
|||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.7. Схема замещения сопротивлений прямой (а) и обратной (б) последовательностей
Так как электромагнитная мощность несимметричной машины складывается из двух мощностей – прямой и обратной последовательностей, которые передаются ротору полями, вращающимися в противоположных направлениях, то результирующий вращающий момент М в данном случае не может быть определен как частное от деления суммарной электромагнитной мощности на синхронную угловую скорость. Его следует определять как сумму двух моментов (рис. 8) - прямого Мпр и обратного Мобр с учетом знака скорости:
M Mпр Мобр |
Рэм1 |
|
Рэм2 |
|
Рэм1 Рэм2 |
. |
(3.10) |
с |
с |
|
|||||
|
|
|
с |
|
|||
Выразив угловую скорость с через скорость вращения nc (об/мин):
97
|
с |
2 nc /60 , |
|
|
|
|
(3.11) |
||||||
после несложных преобразований получим (в Н·м): |
|
||||||||||||
M |
Рэм1 Рэм2 |
9,55 |
Рэм1 Рэм2 |
, |
(3.12) |
||||||||
2 nc /60 |
|
||||||||||||
|
|
|
|
|
nc |
|
|
|
|
||||
или |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
2(I2 |
r |
|
I |
2 |
r |
) |
. |
|
(3.13) |
||
М 9,55 |
|
A1 |
RA1 |
|
A2 |
RA2 |
|
|
|||||
|
|
|
|
|
|
|
|
||||||
nc
Двигатель будет иметь, кроме момента от прямой последовательности поля Мпр, определяющийся по (3.1), момент обратно вращающегося поля Мобр, определяемый при скольжении обратно вращающегося поля sобр:
sобр = 2 - sпр, где sпр - скольжение прямого поля.
|
|
MобрI |
|
ms(2 s)(1 sk2) |
|
|
|
|
|
|
|
|
(3.14) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
(2 s)2 sk2 |
|
|
|
|
|
|
|
|
|
|
|
I |
I |
|
I |
|
|
|
2 |
|
|
|
|
|
2s |
|
|
||||
|
|
|
|
2ms(1 sk )(1 s) |
|
|
|
||||||||||||
M* |
Mпр |
Mобр |
|
|
|
|
|
|
|
|
|
|
1 |
||||||
2 |
|
2 |
] |
|
2 |
s |
2 |
||||||||||||
|
|
|
|
|
|
|
|
sk[sk (2 s) |
|
|
|
sk |
|
|
|||||
и окончательно |
|
|
(3.15) |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M*I |
|
2ms(1 sk2 )(s 1)(s2 sk2 |
2s) |
|
(3.16) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
(s2 sk2)[sk2 (2 s)2] |
|
|
|
|
||||||||||
Для определения значения Мmax, необходимо взять |
|||||||||||||||||||
производные в (3.15) по s. При этом получим |
|
|
|
|
|
|
|
|
|||||||||||
|
|
I |
|
|
|
ms(1 sk2)(1 sk )2 |
|
|
|
|
|
|
|
|
|||||
|
Mmax |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
sk (sk2 2sk 2) |
|
|
|
|
|
|
|
|
|
(3.17) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
2ms(1 sk2) |
|
|
|
|
|
|
|
|
|
||||||
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
M0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sk2 4 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
98

Мпр
Рис. 3.8. Зависимость ω0 от прямого Мпр, обратного и результирующего М вращающих моментов
При пуске трехфазного асинхронного двигателя с оборванной фазой создаются такие же условия, как и в однофазном двигателе, т.е. его результирующий момент при пуске равен нулю. Ротор двигателя находится в неподвижном состоянии и не может разогнаться. Пусковой ток в оставшихся в работе фазах будет приблизительно в 5 раз больше номинального. Это приведет к выходу из строя машины, если защита не отключит ее быстро от сети.
Если ротор двигателя в момент обрыва находится во вращении, то Мпр>Мобр и при Мрез>Мн двигатель продолжает вращаться, однако максимальный момент оказывается существенно меньшим, чем при неповрежденной фазе. При переходе двигателя в однофазный режим частота вращения практически не изменяется, поэтому мощность на валу также остается приблизительно одинаковой. Если двигатель работает при нагрузке, близкой к номинальной, то его ток
99

становится в 3,5-5,0 раз больше номинального и двигатель быстро перегревается и выходит из строя.
2.2.3. Характеристики двигателя при снижении напряжения на одной из фаз
В реальном двигателе действуют две магнитодвижущие силы (см. рис. 3.7), которые создают свои потоки, вращающиеся в противоположные стороны и создающие электромагнитные моменты прямого Мпр и обратного Мобр направления вращения.
Для расчета механических характеристик двигателя вычислим векторы Unp и Uобр. Поскольку система питания двигателя не имеет нулевого провода, то отсутствует и нулевая система напряжений. Определение параметров симметричных систем напряжений проще выполнить графическим построением. Для этого строят в удобном масштабе несимметричную систему линейных напряжений ABC (рисунок 3.9). Затем на одной из сторон (ВС) возводят два равносторонних треугольника ВДС и ВСЕ. Отрезок AD в соответствующем масштабе изображает 3Unp, а отрезок АЕ - 3Uобр, где Unp и Uo6p - модули симметричных систем фазных напряжений. Затем вычислим значения критических моментов:
Uпр |
|
2 |
|
|
|||
|
|
|
|
|
|
, |
(3.18) |
|
|
|
|||||
Мкр.пр Мк |
|
|
|
||||
Uном |
|
|
|||||
U |
обр |
|
2 |
|
|
||
|
|
|
|
, |
(3.19) |
||
Мкр.обр Мк |
|
|
|
||||
Uном |
|
|
|||||
где Мк - критический момент двигателя при нормальной схеме питания (симметричная система).
|
|
mU12 |
|
||
Мк |
|
|
|
, |
(3.20) |
|
|
|
|||
|
|||||
|
2 0 |
r12 X1 X2 2 r1 |
|
||
где Uн - номинальное фазное напряжение.
100