

Клещевой захват. методические указания к выполнению виртуальной лабораторной работы для студентов всех форм обучения. Калинин Ю.И., Иванищев П.И
.pdfФедеральное государственное бюджетное образовательное учреждение высшего образования
«Воронежский государственный технический университет»
Кафедра строительной техники и инженерной механики имени доктора технических наук, профессора Н.А. Ульянова
170-2017
Клещевой захват
Методические указания
к выполнению виртуальной лабораторной работы для студентов всех форм обучения направлений подготовки
23.03.02"Наземные транспортно-технологические комплексы",
23.03.03"Эксплуатация транспортно-технологических машин и комплексов", специальности 23.05.01 "Наземные транспортно-технологические средства"
Воронеж 2017
УДК 621.86 ББК 38.6 – 44я7
Составители: Калинин Ю.И., Иванищев П.И., Ульянов А.В.
Клещевой захват : методические указания к выполнению виртуальной лабораторной работы для студентов всех форм обучения направлений подготовки 23.03.02 "Наземные транспортно-технологические комплексы", 23.03.03. "Эксплуатация транспортно-технологических машин и комплексов", специальности 23.05.01 "Наземные транспортно-технологические средства" / ВГТУ; сост.: Ю.И. Калинин, П.И.Иванищев, А.В. Ульянов. – Воронеж, 2017. – 6 с.
Лабораторные работы по дисциплинам "Грузоподъемные машины", "Подъемно-транспортные машины и оборудование", "Конструкция подъемнотранспортных машин и оборудование" разработаны для изучения данных дисциплин при дистанционном обучении.
Предназначены для студентов всех форм обучения по направлениям подготовки 23.03.02. "Наземные транспортно-технологические комплексы", 23.03.03. "Эксплуатация транспортно-технологических машин и комплексов" и специальности 23.05.01 "Наземные транспортно-технологические средства".
Издание подготовлено в электронном виде и содержится в файле «МУ Клещевой захват.pdf».
Ил. 3. Табл. 2. Библиогр.: 4 назв.
УДК 621.86 ББК 38.6 – 44я7
Издается по решению учебно-методического совета ВГТУ
Рецензент – А.А. Кононов, д-р техн. наук, профессор кафедры информатики и графики ВГТУ
© ФГБОУ ВО «Воронежский государственный технический университет», 2017
Лабораторная работа
Клещевой захват
Цель работы.
Познакомится с конструкцией, принципом работы, расчетными положениями грузовых захватов клещевого типа.
1.Общий порядок выполнения лабораторной работы
1.1.Познакомиться с конструкцией клещевых захватов по литературе [1-4]
ип.2. настоящих методических указаний. Уяснить принцип действия лабораторного макета клещевого захвата и ответить на контрольные вопросы.
1.2.Познакомиться с виртуальной моделью клещевого захвата.
1.3.Провести с виртуальной моделью опыты по определению параметров, характеризующих условия надежного удержания груза захватом. Для чего выполнить действия по п. 4 настоящих методических указаний.
1.4.Отчет по лабораторной работе должен содержать название работы с указанием выполняемого варианта, ФИО исполнителя, обозначение учебной группы. Титульный лист отчета можно выполнить по титульному листу настоящих указаний с добавлением адресных данных исполнителя, указанных выше.
В отчете необходимо привести расчетную схему лабораторной установки, ответы на контрольные вопросы, табл. 2 с результатами расчетов по формулам
итабл. 3 с результатами опытов на виртуальной модели, анализ полученных результатов и выводы по работе.
Литература:
1.Вайнсон А.А. Подъемно-транспортные машины: учебник – М.: Машиностроение, 1989. – 536 с.
2.Ю.И. Калинин Ю.И., Ульянов А.В. Грузоподъемные машины: лабораторный практикум. Воронежский ГАСУ – Воронеж, 2012. - 192 с.
3.Козлов Ю.Т., Обермейстер А.М. Протасов Л.П. и др. Грузозахватные устройства: справочник – М .: Транспорт, 1980 – 223 с.
4.Федеральные нормы и правила безопасности опасных производственных объектов, на которых используются подъемные сооружения: нормативный документ – www.gosnadzor. ru, 2014. – 148 c.
2. Лабораторный макет "Клещевой захват"
Лабораторный макет клещевого захвата позволяет наглядно продемонстрировать принцип действия большого семейства захватов для штучных, пакетированных и тарных грузов. На рис. 1 показаны некоторые виды клещевых захватов для различных грузов.
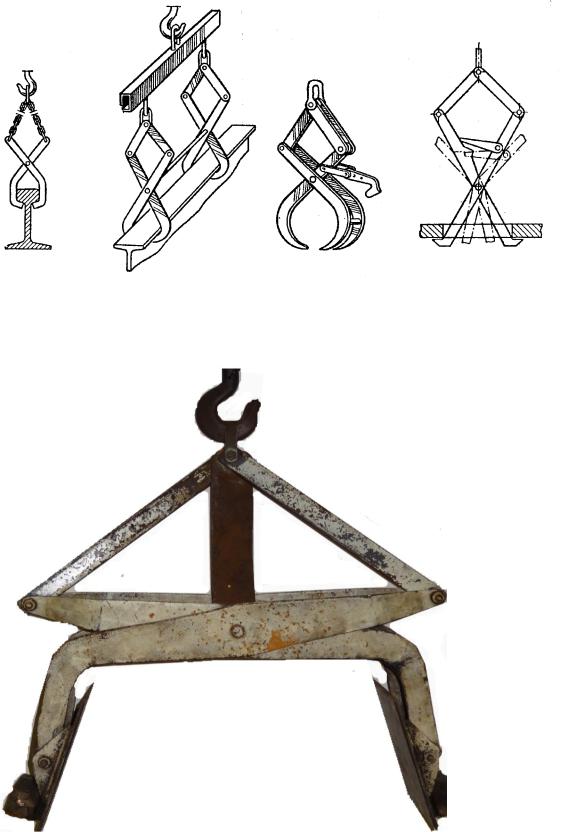
Рис. 1. Конструкция захватов для различных видов грузов
Лабораторный макет клещевого захвата показан на рис. 2.
Рис. 2. Общий вид лабораторного макета клещевого захвата
Захват состоит из двух пар рычагов, соединенных между собой шарниром по принципу "ножницы". Каждая пара свободными концами рычагов соединена шарнирами с пластинами, образующими две зажимные щеки.
2
Другие концы рычагов шарнирно соединены тягами в замкнутый четырехзвенник. К общему шарниру тяг присоединена петля для навески захвата на крюк крана. Для удержания щек захвата в открытом положении при наведении захвата на груз предусмотрен блокировочный крюк временной связи общего шарнира тяг с центральным шарниром «ножниц». Блокировочный крюк управляется стропальщиком.
Контрольные вопросы
1. Какое основное требование предъявляется к грузозахватным устройст-
вам?
2. Какие условия необходимо соблюдать при работе с клещевым захва-
том?
3.Какие факторы определяют возможность удержания груза клещевым захватом?
4.Кто осуществляет осмотр захватов при эксплуатации?
5.Какова периодичность проверки захватов при эксплуатации?
6. Какой эксплуатационный эффект дает применение клещевых захватов? 7. Какой нагрузкой должны испытываться захваты при изготовлении?
8. Что характеризует безопасность применяемого захвата?
9. Как обеспечивают в непредвиденных случаях безопасность работ при подъеме грузов с использованием захватов?
3. Виртуальный макет клещевого захвата
Виртуальный макет клещевого захвата состоит из трехмерной интерактивной модели, представленной плоским механизмом, отражающим конфигурацию лабораторного макета. Модель имеет грузоподъемный механизм и динамометр для измерения усилия зажатия груза. На монитор выведено табло, имеющее кнопки управления грузоподъемным механизмом, и лимб с динамометром.
При работе с моделью осуществляют управление изображением (перемещения и повороты) для получения полного представления о конструкции лабораторного макета и управление оборудованием (подъем, опускание захвата, управление блокировочным крюком, измерение зажимающего усилия, специальная подвеска груза).
3.1. Управление изображением
Управление изображением производится компьютерной мышью.
Перемещение изображения по экрану – перемещением мыши при нажа-
том колесе.
Смещение ближе-дальше – вращением колеса мыши.
Вращение вокруг оси Х – вращением колеса при нажатой кн. Shift. Вращение вокруг оси Y – перемещением мыши, колесо и кн. Shift нажаты.
3
Вращение вокруг оси Z – перемещением мыши, колесо и кн. Сtrl нажаты.
Перемещение табло по экрану монитора – нажатием правой (левой)
кнопки мыши при установленном курсоре в точках Х, У, Z на иконке в правом углу монитора.
3.2. Управление оборудованием
Подъем (опускание) и горизонтальное перемещение захвата вправо (влево)
– производится посредством тали, управляемой соответствующими кнопками, входящими в ее состав, а также с помощью кнопок, находящихся на дополнительной панели управления рядом с динамометром.
Зацепление (отцепление) блокировочного крюка – производится щелчками мыши по нему.
Зацепление (отцепление) измерительного динамометров – выполняется щелчками мыши по синим осям крепления щек захвата.
Подвеска грузов к осям крепления щек захвата – осуществляется щелчка-
ми мыши по цепям, прикрепленным к верхним плоскостям грузов.
Растягивание захвата динамометрами – производится воздействием мы-
ши на свободные красные кольца динамометров.
Уменьшение (увеличение) ширины груза – производится удержанием кур-
сора левой (правой) кнопкой мыши на надписи с размером груза.
Изменение массы груза и коэффициента трения - выполняется посредст-
вом элементов управления, расположенных на панели в нижнем правом углу экрана.
Для отображения (скрытия) геометрических параметров захвата – сле-
дует поставить или снять галочку на панели в нижнем правом углу экрана. Запись параметров в протокол выполняется нажатием кнопки "Запись" на
панели в правом нижнем углу экрана.
4. Порядок выполнения лабораторной работы
4.1. Рассчитать величину коэффициентов запаса при удержании клещевым захватом груза с параметрами согласно варианту задания в табл. 1.
Расчетная схема сил, действующих на рычаг захвата, изображена на рис. 3.
Таблица 1
Параметры задания по варианту
Вариант задания |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
Размер груза в захвате, мм |
50 |
80 |
100 |
150 |
200 |
250 |
300 |
350 |
Сила тяжести груза G, кг |
3,5 |
4,0 |
5,0 |
6,0 |
7,0 |
8,0 |
9,0 |
10,0 |
Коэфф. трения груза в захвате f |
0,1 |
0,15 |
0.2 |
0,25 |
0,3 |
0.35 |
0,4 |
0,45 |
Величины расчетных параметров занести в таблицу 2.
4
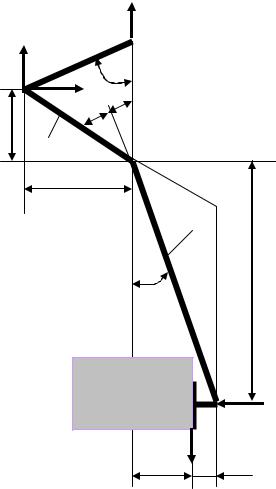
Таблица 2
Расчетные параметры захвата
№ п/п |
Наименование параметра |
Обозначение и формула |
Величина |
|
|
|
|
|
|
1 |
Сила тяжести груза по заданию, Н |
Gг |
|
|
2 |
Размер груза для захвата по заданию, м |
l |
|
|
3 |
Коэффициент трения груза по заданию |
f |
|
|
4 |
Сила тяжести захвата, Н |
Gз |
210 |
|
5 |
Размер проушины щеки, мм |
е |
25 |
|
6 |
Расчетная длина плеча полурычага, мм |
m |
265 |
|
7 |
Длина плеча полурычага, мм |
к |
230 |
|
8 |
Длина тяги захвата, мм |
lт |
290 |
|
9 |
Угол излома рычага, град. |
δ° |
30 |
|
10 |
Расчетный угол рычага, град. |
γ° = arc sin (0,5l+e)/m |
|
|
11 |
Размер b, |
мм |
b = m·cos γ |
|
12 |
Размер c, |
мм |
c = k·sin(γ+δ) |
|
13 |
Размер d, |
мм |
d = k·cos(γ+δ) |
|
14 |
Угол α, град |
α° = arc sin (d / lт) |
|
|
15 |
Горизонтальная составляющая в тяге, Н |
Тх =[(Gг+Gз)/2]tg α |
|
|
16 |
Вертикальная составляющая в тяге, Н |
Ту =(Gг+Gз)/2 |
|
|
17 |
Усилие сжатия груза, Н |
N =(Gг ·l/2+ Тх·c+ Тy·d)/b |
|
|
18 |
Силы трения, удерживающие груз, Н |
Fтр = 2N·f |
|
|
19 |
Расчетный коэффициент запаса |
Кзап = Fтр / Gг |
|
|
|
|
Gгр+Gз |
Ту |
lm |
α |
|
|
Тх |
с |
|
γ |
|
k |
δ |
|
d |
|
|
|
т |
|
|
γ |
|
|
b |
|
N |
Gг/2 |
|
l/2 |
e |
Рис. 3. Схема действия сил на рычаг захвата
5
4.2.На виртуальной модели переместить таль в крайнее левое положение, полностью опустить захват на пол, отцепить блокировочный крюк, произвести попытку подъема груза с параметрами согласно варианту задания. Рассчитать коэффициент запаса при удержании груза.
4.3.Построить график зависимости коэффициента запаса для удержания груза в зависимости от размера груза при массе груза и коэффициенте трения согласно заданному варианту. Для этого надо переместить таль на максимально поднятой высоте в крайнее правое положение с прицепленным блокировочным крюком. Прицепить динамометры и грузы к рычагам. Отцепить блокировочный крюк захвата. Воздействуя кнопкой мыши на свободное красное кольцо одного из динамометров изменять расстояние между щеками захвата с шагом 20 мм. Для каждого расстояния фиксировать результаты замеров нажатием кнопки «Запись».
Результаты замеров, представленные в табличной и графической формах, можно посмотреть, обратившись к пунктам «Протокол» и «Графики» главного меню программы.
Проанализировать полученные результаты и сделать выводы по работе. Таблицу и график сохранить в текстовом и графическом файлах соответст-
венно для представления в отчете по лабораторной работе.
СОДЕРЖАНИЕ
Лабораторная работа. Клещевой захват …………………………………………...1
1.Общий порядок выполнения лабораторной работы ……………………1
2.Лабораторный макет «Клещевой захват» ……………………………….1
3.Виртуальный макет клещевого захвата …………………………………3
3.1.Управление изображением ………………………………………...3
3.2.Управление оборудованием ………………………………………..4
4.Порядок выполнения лабораторной работы …………………………….4
6
Клещевой захват
Методические указания
к выполнению виртуальной лабораторной работы для студентов всех форм обучения направлений подготовки
23.03.02"Наземные транспортно-технологические комплексы",
23.03.03"Эксплуатация транспортно-технологических машин и комплексов", специальности 23.05.01 "Наземные транспортно-технологические средства"
Составители: Калинин Юрий Иванович Иванищев Павел Иванович
Ульянов Алексей Васильевич
В авторской редакции
Подписано к изданию 28.12.2017. Уч.-изд. л. 0,4
ФГБОУ ВО «Воронежский государственный технический университет» 394026 Воронеж, Московский проспект, 14.