

3.1.1. Электроприводы крановых механизмов
Механизмы подъёмных кранов работают в повторно-кратковременном режиме, характеризуемом определённой продолжительностью включения (ПВ). Как правило, электродвигатели крановых механизмов работают по произвольным, случайным графикам, не имеющим строго выраженных по нагрузке и по времени рабочих циклов [1, 8, 11]. В связи с этим, построение нагрузочных диаграмм крановых электроприводов затруднено, и в практике во многих случаях предварительный выбор двигателей для таких электроприводов принимают окончательным, особенно, если расчёт производится по уточненным формулам [11]. В данном курсовом проекте выбор двигателя следует выполнить в 2 этапа.
Предварительный выбор электродвигателей производится на основе расчётной статической нагрузки электропривода.
Электропривод механизма подъёма.
Мощность и момент на валу двигателя можно определить по формулам [1, 3]:
![]() , (1)
, (1)
![]() , (2)
, (2)
где G и G0 – вес (сила подъёма) груза и грузозахватного приспособления;
V – скорость подъёма груза;
D – диаметр барабана подъёмной лебёдки;
– КПД подъёмного механизма (с учётом всех передач),
i – полное передаточное отношение (редуктора и полиспаста).
Электропривод передвижения крана.
Расчёт статической нагрузки мощности и момента можно выполнить по формулам [1, 3],
![]() , (3)
, (3)
 , (4)
, (4)
где G и G1 – вес перемещаемого груза и собственный вес механизма передвижения;
k – коэффициент, учитывающий трение реборд колёс о рельсы;
– коэффициент трения скольжения;
f – коэффициент трения качения;
/значения коэффициентов K, , f даются в справочной литературе [2,7]/;
R – радиус колеса;
r – радиус шейки оси (цапфы ) колеса /в расчётах можно принимать r=0.15R/;
V – скорость движения механизма;
iП – передаточное отношение редуктора механизма передвижения;
П – КПД механизма передвижения;
FB – сила от ветровой нагрузки, которая может быть определена по формуле FB=PS,
здесь Р – удельная ветровая нагрузка, S – площадь, на которую действует ветровая нагрузка.
Электропривод механизма поворота.
Расчёт мощности и момента для предварительного выбора двигателя можно выполнить по формулам (1,3),
![]() , (5)
, (5)
![]() , (6)
, (6)
где G и G2 – вес груза и поворотной платформы;
k – коэффициент, учитывающий трение реборд поворотного круга (если есть реборды);
f – коэффициент трения качения;
DКР – диаметр поворотного круга;
dp – диаметр роликов (катков);
в – угловая скорость поворота платформы;
Р - удельная ветровая нагрузка;
S – площадь действия ветровой нагрузки;
l – длина (вылет) стрелы крана;
iB – передаточное отношение механизма поворота;
B – КПД механизма поворота.
По полученным расчётным значениям статической нагрузки (мощности или моменту) по каталогу [1] производится выбор соответствующего кранового электродвигателя со стандартным ПВ=25%, т.к. строительные краны, в основном, работают в лёгком или среднем режиме работы [1, 3, 6, 11].
3.1.2. Электроприводы конвейеров
Конвейеры относятся к механизмам непрерывного транспорта, работающим в основном в продолжительных режимах и с постоянной скоростью [9,10].
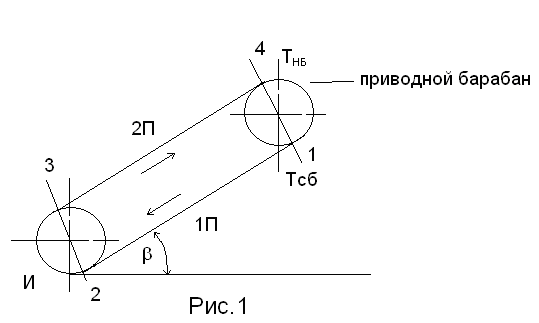
Для определения мощности ленточного конвейера, схема которого представлена на рис.1, можно воспользоваться формулой [4]:
![]() , (7)
, (7)
где kз – расчётный коэффициент запаса, kз = 1,1-1,3;
V – скорость движения конвейера;
P – КПД редуктора привода P = 0,8 – 0,9;
Тсб – натяжение в сбегающем участке ленты конвейера;
Тнб – натяжение в набегающем участке ленты конвейера.
Натяжение в сбегающем участке можно определить можно по формуле:
![]() , (8)
, (8)
где kдин – коэффициент запаса, учитывающий динамические нагрузки, kдин = 1,2 -1,3;
- коэффициент трения между тяговыми и приводными элементами;
- угол обхвата приводного барабана лентой;
kИ – коэффициент, учитывающий натяжение на участках изгиба ленты [4];
FП – расчётное усилие на прямолинейных участках конвейера, FП=F12 КИ + F34
F12 и F34 – соответствующие усилия сопротивления на прямолинейных участках “1-2” и “3-4” (см. рис.1).
Эти усилия могут быть определены по формулам
F12 = q0l12(CПcos - sin) , (9)
F34 = (q0+qГ)·l34 (CПcos + sin), (10)
где l12 и l34 – длины прямолинейных сбегающего и набегающего участков конвейера;
CП – коэффициент сопротивления движению на прямолинейном участке [4];
- угол наклона;
q0 и qГ – весовая нагрузка конвейера от ленты и полезного груза, Н/м.
Эти нагрузки соответственно определяются:
q0 = gm0 и qГ = gmГ,
где g – ускорение силы тяжести;
m0 и mГ – соответственно масса 1м ленты и размещенного на ней груза.
Масса 1м транспортируемого груза определяется по формуле:
![]() , (11)
, (11)
где П – производительность конвейера, кг/ч.
Натяжение в набегающем участке приводного барабана конвейера можно определять по формуле:
![]() , (12)
, (12)
где m - расчётная суммарная масса движущей части конвейера, m=m34+m12kИ,
адоп – допустимое ускорение конвейера, м/с2.
По расчётной статистической мощности конвейера по каталогу производится выбор соответствующего двигателя для электропривода.