

3.5. Характеристики исполнительного механизма постоянной скорости
Исполнительный
механизм постоянной скорости подключается
к выходу релейного элемента. Поэтому
его структуру можно представить как
последовательное соединение
трехпозиционного нелинейного элемента
и интегрирующего звена. Их совместная
характеристика - зависимость выходной
величины от входного воздействия
![]() в общем виде имеет вид представленный
на рисунке 3.11, где
- входное воздействие,
в общем виде имеет вид представленный
на рисунке 3.11, где
- входное воздействие,
![]() -
зона нечувствительности,
-
зона нечувствительности,
![]() -
зона возврата, SН,
-
зона возврата, SН,
![]() -
номинальная скорость и перемещение ИМ
соответственно. Обычно нелинейная
характеристика определяется пусковым
устройством ИМ. Механизм может находиться
в трех состояниях.
-
номинальная скорость и перемещение ИМ
соответственно. Обычно нелинейная
характеристика определяется пусковым
устройством ИМ. Механизм может находиться
в трех состояниях.
1.
 при
при
 ;
;
2.
 при
при ;
;
3.
![]() при
при
 ;
;
4. Перемещение ИМ в зоне возврата определяется знаком производной (направлением изменения) входного воздействия.
Х арактеристика
ИМ не линейна. Характеристику близкую
в среднем к линейной можно получить,
если использовать импульсный режим
работы исполнительного механизма (ИМ).
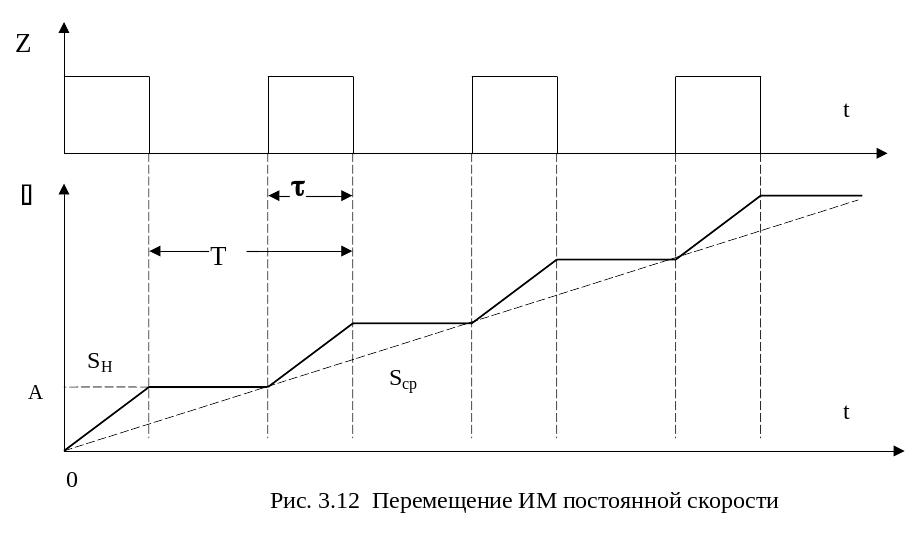
Действительно, пусть на ИМ поступает
импульсный сигнал z(t)
единичной амплитуды и следующими
параметрами импульсов:
- длительность импульса, T-
период следования импульсов,
арактеристика
ИМ не линейна. Характеристику близкую
в среднем к линейной можно получить,
если использовать импульсный режим
работы исполнительного механизма (ИМ).
Действительно, пусть на ИМ поступает
импульсный сигнал z(t)
единичной амплитуды и следующими
параметрами импульсов:
- длительность импульса, T-
период следования импульсов,
![]() - скважность следования импульсов (Рис.
3.12). При каждом импульсе ИМ перемещается
на величину h
с номинальной скоростью SН=
- скважность следования импульсов (Рис.
3.12). При каждом импульсе ИМ перемещается
на величину h
с номинальной скоростью SН=![]() =
=![]() =ОА/.
Средняя скорость S=ОА/T=Sн/T=Sн.
Тогда для среднего значения выходного
сигнала
=ОА/.
Средняя скорость S=ОА/T=Sн/T=Sн.
Тогда для среднего значения выходного
сигнала
![]() получим
уравнение
получим
уравнение
![]() ,
которое является уравнением интегрирующего
звена с передаточной функцией W(p)=Sср./p.
Таким образом, ИМ постоянной скорости,
работающий в импульсном режиме может
быть представлен интегрирующим звеном
с передаточной функцией W(p)=Sср./p.
,
которое является уравнением интегрирующего
звена с передаточной функцией W(p)=Sср./p.
Таким образом, ИМ постоянной скорости,
работающий в импульсном режиме может
быть представлен интегрирующим звеном
с передаточной функцией W(p)=Sср./p.
4. Регуляторы
4.1 Регуляторы прямого действия
4.2 Двухпозиционные регуляторы
4.3 Аналоговые регуляторы
4.4 Аппаратная реализация функциональных узлов регуляторов
4.5 Регуляторы с исполнительным механизмом постоянной скорости
4.6 Агрегатные комплексы средств автоматизации
4.7 Цифровые системы управления и регулирования
Электронные регуляторы широко используются для создания локальных систем регулирования различных технологических параметров. Регулирование ведется по релейному, П, ПИ, ПИД законам регулирования. Устройства имеют разные принципы действия, разное исполнение и условия эксплуатации.
Инженер в области автоматизации должен знать принцип действия различных регуляторов, их устройство, методы сопряжения с датчиками и исполнительными механизмами, уметь находить неисправности.
Цель главы – ознакомление с принципом действия и устройством различных типов электронных регуляторов.
ПОСЛЕ ИЗУЧЕНИЯ ГЛАВЫ НЕОБХОДИМО ЗНАТЬ
принципы построения релейных, и аналоговых П, ПИ, ПИД регуляторов,
принцип действия П, ПИ, ПИД регуляторов с исполнительными механизмами постоянной скорости,
классификацию приборов по роду используемой энергии носителем информации,
функциональный состав агрегатных комплексов и устройство входящих в них регуляторов,
состав и принцип действия функциональных узлов регуляторов.
Регуляторы по принципу функционирования можно разделить на регуляторы прямого действия и непрямого действия, которые, в свою очередь, можно разделить на три группы по виду управляющего сигнала на выходе:
Позиционные регуляторы, выходные сигналы которых могут принимать 2,3 и более дискретных значения (2,3 позиционные).
Аналоговые регуляторы, у которых на выходе присутствуют непрерывные аналоговые сигналы.
Аналого-импульсные (импульсные) регуляторы, управляющие сигналы на выходе которых представляют собой последовательность импульсов.