

Авиаперспектива. региональный сборник научных трудов
.pdfвляют данный метод чаще является термоэлектрический дефекто- скоп-толщиномер ТЭС-364М.
Так же к методам неразрушающего контроля относится радиационный контроль. Исследуемый объект подвергается ионизации. Метод также в некоторых источниках называют «рентгеновским» или «нейронным». Дефекты в определяемом объекте будут определяться по изменению плотности излучения. С помощью радиационного контроля определяют глубинные и поверхностные трещины, рыхлоты, шлаковые включения. Из-за дороговизны и громоздкости оборудования, производящего контроль, он проводится только по особому предписанию, или когда другими методами нет возможности воспользоваться. Данный метод контроля следует проводить только специалистам, допущенным к проведению таких работ, ознакомленному с правилами пользования измерительных приборов и рисками.
Метод неразрушающего контроля с проникающими веществами основан на индикации нарушений в целостности исследуемого объекта индикаторными веществами. После их нанесения визуально определяют оставшиеся следы, предполагая тот или иной вид несоответствия состояния объекта заданных характеристикам. Поверхность материала смачивается индикаторной жидкостью, затем её излишки удаляют с поверхности и визуально оценивают характер и глубину дефектов. Смачивающая жидкость может проявляться ярко-оранжевым цветом или обнаруживаться при ультрафиолетовом свечении. Стоит сказать, что метод требует значительных затрат времени и считается наиболее продолжительным по сравнению с остальными.
Акустический метод неразрушающего контроля основывается на фиксации показателей упругих волн, которые возникают или возбуждаются в исследуемом объекте. Как правило, используются упругие волны ультразвукового диапазона. В литературе данный метод ещё называют «ультразвуковым». Физический смысл ультразвукового метода заключается в отражении упругих волн от дефектов: трещин в материале, негерметичных швов. Использование метода отлично подходит для всех материалов, проводящих акустические волны. Точность измерений зависит от ме-
120
ры загрязненности исследуемой поверхности, посторонних шумов, температуры объекта.
На практике каждый из представленных методов более сложную разветвленную структуру. Для обеспечения сохранения эксплуатационных качеств к каждому объекту исследования подбираются собственные методы контроля.
Литература
1.Канаевский И.Н Неразрушающие методы контроля: учеб. пособие / И.Н Канаевский, Е.Н Сальникова. - Владивосток: Изд-во ДВГТУ, 2007. - 243 с.
2.Клюев В.В. Неразрушающий контроль. Том 1. Книга 1. - М.: Машиностроение, 2008. - 323 с.
Воронежский государственный технический университет
УДК 621.9.047
С.Ю. Жачкин, д-р техн. наук, проф., Н.А. Пеньков, канд. техн. наук, нач. лаб., О.А. Сидоркин, канд. техн. наук,
преподаватель
СРАВНИТЕЛЬНАЯ ОЦЕНКА КАЧЕСТВ СИСТЕМ РУЧНОГО УПРАВЛЕНИЯ
Приводятся различные методики оценки качества систем ручного управления. Излагаются экспериментальные данные по исследованию рассогласования в зависимости от зоны манипулирования
Ключевые слова: манипулятор, мнемоничность, ручное управление
При всех исследованиях (независимо от конкретной конструкции стенда) двигательная задача включала обведение (по возможности быстрое и точное) двумерной плоской фигуры — эталона. В этой статье будет сказано о результатах только одной из выполненных по этой методике экспериментальных работ, которая представляет особый интерес для изучения мнемоничности
— важного свойства систем ручного управления [1].
При всех их достоинствах такие устройства не свободны от недостатков. Так, выполнение рабочих операций в некоторых
121
зонах рабочего пространства манипулятора вынуждает оператора принимать неудобные позы, что значительно снижает точность и производительность работы. Кроме того, в ряде приложений пространство движений оператора оказывается существенно ограниченным (по техническим условиям), что обусловливает неоправданные ограничения рабочего объема исполнительных рук. Попытка устранить эти недостатки путем увеличения коэффициента масштабности связана с уменьшением разрешающей способности системы «оператор — манипулятор», с возрастанием усилий, необходимых для управления, и также ведет к снижению эффективности работы.
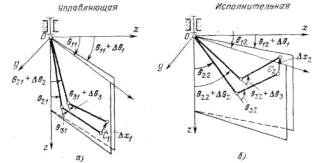
Экспериментальное исследование, о котором идет речь, имело целью проверить целесообразность применения способа управления, допускающего, что положения задающих и исполнительных рук манипулятора могут быть рассогласованы на ту или иную величину (рис. 1) за счет изменения положения, например, исполнительных рук. Такое рассогласование приводит к двум последствиям. Рабочее пространство исполнительных рук может быть значительно увеличено, в то время как рабочее пространство задающих рук остается неизменным. Однако достигаемый при этом выигрыш — увеличение зоны обслуживания — даром не дается. По мере увеличения рассогласования системы следует, очевидно, ожидать ухудшения ее управляемости, поскольку снижается мнемоничность. Задача состояла в том, чтобы проверить эти предположения и оценить качество такого «управления с рассогласованием».
Рис. 1. Графическая схема поведения манипулятора
122

Первым этапом исследования явились предварительные опыты. Они проводились на копирующем манипуляторе на производственных площадях компании «Промэнерго». Операторы по возможности быстро и точно выполняли некоторые простые операции по переносу предметов из одних положений в другие при различных величинах рассогласований 1 = 12 - 11 задающих и исполнительных органов манипулятора по углу 1 в пределах от 0° до 180°. При этом замерялось время выполнения операций.
В результате опытов оказалось, что при рассогласованиях до величин порядка 45° время, затрачиваемое на операцию, увеличивалось незначительно. При дальнейшем увеличении рассогласования оно быстро возрастало и в пределах углов 100—150° увеличивалось в 15—25 раз (рис. 2). Далее, оказалось, что при «зеркальном» рассогласовании рук (в окрестности 180°) оператор довольно быстро приспосабливался и времена, которые он затрачивал на выполнение операций, практически оказывались равными временам, затрачиваемым при рассогласованиях до 45°. Из выполненных опытов следовало, что человек-оператор обладает существенной компенсаторной приспособляемостью и может легко приспособиться к работе с манипулятором, в котором искусственно вводятся рассогласования задающих и исполнительных рук по углу 1 в сравнительно широких пределах. Складывалось впечатление, что эти адаптивные возможности оператора могут оказаться достаточными для успешной компенсации понижения (вследствие введенных рассогласований) мнемоничности системы.
Рис. 2. Зависимость рассогласования от зоны действия
123
Однако объективно мотивированное заключение об эффективности управления с рассогласованием требовало не только качественного суждения, но и количественных оценок. А это в свою очередь связано с определением количественных оценок мнемоничности систем ручного управления. При разработке таких оценок необходимо учитывать две существенные особенности копирующих манипуляторов. Одна из них отражает тот хорошо известный факт, что опытный, тренированный оператор в процессе ручного управления обычно сосредоточивает внимание на объекте манипулирования, на рабочей зоне, на анализе и оценке возникающих ситуаций, на разработке «тактики» и «стратегии» управляющих движений.
В силу особенностей мышечного чувства для квалифицированного оператора, управляющего манипулятором, рукоятки задающих рук оказываются как бы совмещенными с захватами исполнительных рук. Это первое из обстоятельств, которое хорошо известно из опыта и может служить основой для построения количественных оценок мнемоничности копирующих устройств робототехники.
Если обе части устройства — задающая и исполнительнаяидентичны по структуре и подобны геометрически и если они установлены без рассогласования, то движения плеча и предплечья исполнительной руки, как и движения центров трех ее крупных суставов, в точности воспроизводят движения задающей; при этом совершенно одинаково движутся рукоятка и захват, и, значит, есть все основания считать, что в этом случае достигается максимальный уровень мнемоничности.
Учитывая сказанное, представляется обоснованным требовать, чтобы оценка уровня мнемоничности характеризовала, насколько отличается вектор перемещения захвата в некоторой точке рабочего пространства исполнительной руки от вектора перемещения управляющей рукоятки в соответствующей точке ее рабочего пространства. Не лишено оснований предположение о том, что подобный подход можно использовать для оценки мнемоничности других систем ручного управления.
О другом обстоятельстве, которое следует учитывать при формировании любых оценок манипуляционных систем (МС),
124
уже говорилось ранее. Оно связано с высокой функциональностью последних, в силу которой оценки должны носить глобальный характер, и относиться не к одной или нескольким точкам рабочего пространства, а охватывать множество возможных конфигураций МС в пределах всего рабочего пространства.
Литература 1. Диметбергер Ф.М. Теория пространственных механиз-
мов. М.: Наука, 1982. 159 с.
ВУНЦ ВВС «ВВА имени профессора Н.Е. Жуковского и Ю.А. Гагарина», г. Воронеж
УДК 621.9.047
С.Ю. Жачкин, д-р техн. наук, проф., Н.А. Пеньков, канд. техн. наук, нач. лаб., О.А. Сидоркин, канд. техн. наук,
преподаватель
КОЛИЧЕСТВЕННАЯ ОЦЕНКА МНЕМОНИЧНОСТИ КОПИРУЮЩИХ МАНИПУЛЯЦИОННЫХ СИСТЕМ
Приводится количественная оценка мнемоничности копирующих манипуляционных систем. Дается количественная оценка рассогласования задающего и реализуемого перемещения в зависимости от локального коэффициента усиления копирующего устройства
Ключевые слова: манипулятор, мнемоничнсть, оценка качества
Перейдем теперь к формированию количественных оценок мнемоничности копирующих манипуляционных систем (МС), для чего рассмотрим рисунок.
Любое движение захвата исполнительной руки, реализуемое оператором в различных точках рабочего пространства, можно представить в виде последовательности малых изменений конфигурации МС. Введем элементарную операцию перемещения захвата МС: «переместить захват из точки х2 рабочего пространства в близкую точку х2+ х2». Чтобы реализовать такую элементарную операцию в фиксированной конфигурации МС, необходимо сообщить обобщенным координатам 12, 22, 32 исполнительной руки приращения 12, 22, 32.
125
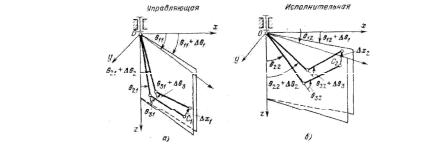
Графическая схема поведения манипулятора
Для рассматриваемой здесь системы прямого копирования эти приращения тождественны приращениям j1 (j = 1, 2, 3) на задающей руке. Если рассогласование отсутствует, то тождественными оказываются и перемещения точек С1 и С2 ( x1= x2). При наличии рассогласования в силу нелинейности геометрических характеристик МС задающее перемещение х1 будет отличаться от реализуемого по величине и направлению.
Количественная оценка рассогласования задающего и реализуемого перемещений выражается комплексной величиной, модуль которой представляет собой локальный коэффициент усиления копирующей МС, аргумент равен углу между векторами х1 их2. Эти две скалярные величины могут рассматриваться как два различных показателя («критерия») качества копирующей МС наряду с третьим критерием — увеличением объема рабочего пространства исполнительной руки по отношению к задающей. Здесь ограничимся анализом только одного из этих показателей - рассогласования по углу, характеризуя его величиной [1]
K , x2 |
|
|
x1 T x2 |
(1) |
|||
|
x1 |
|
x2 |
|
|
||
|
|
|
|
|
|||
равной косинусу угла между х1 и х2. Такую меру рассогласования, учитывая ее зависимость от вектора х2 элементарной операции перемещения, будем называть локальным коэффициентом мнемоничности.
Представим элементарное перемещение в виде x2= , где= = | х2|, — единичный вектор. Можно показать, что для малых в преобразование, переводящее х2 в х1 является линейным при
126
фиксированной конфигурации , хотя коэффициенты этого преобразования нелинейно зависят от углов j2. Значит, если рассмотреть множество всевозможных элементарных перемещенийх2 одинаковой величины , образующих сферу радиуса с центром в точке С2, то соответствующие перемещения х1 описывают эллипсоид с центром в точке C1.
Нетрудно видеть, что значение локального коэффициента мнемоничности (1) зависит только от направления , т. е. K( , ) представляет функцию, определенную на единичной сфере. Среднее значение K функции K( , ) будем называть коэффициентом мнемоничности конфигурации :
K |
1 |
K , d |
(2) |
|
4 |
||||
|
|
|
Здесь d — элемент поверхности единичной сферы. Поскольку K( , ) = K( ,- ), то при вычислении (2) можно ограничиться лишь полусферой.
Среднее значение К множества коэффициентов мнемоничности К , вычисленных по всему пространству возможных конфигураций, представляет собой глобальную оценку мнемоничности копирующей МС.
K 1 K d |
(3) |
где d — элемент объема, а - полный объем пространства конфигураций, рассматриваемого как область многомерного евклидова пространства (в рассматриваемом случае - трехмерного).
Использование в качестве оценок мнемоничности интегральных средних К и К функции K( , ) основано на следующих соображениях. Несомненно, что различные операторы, решая одну и ту же двигательную задачу, формируют различные последовательности элементарных операций. Усреднение по всем операциям позволяет «исключить» из оценки мнемоничности «человеческие» качества, вносимые оператором, и охарактеризовать мнемоничность как собственное, чисто геометрическое свойство копирующей МС.
Такое совпадение элементарных операций при анализе различных собственных свойств отнюдь не случайно. Дело в том,
127
что функции оператора в копирующих МС, как и функции подсистемы искусственного интеллекта в автоматических МС, заключаются в построении движений исполнительной руки. То обстоятельство, что эти функции реализуются в одном случае путем перемещения вручную задающей рукоятки, а в другом — за счет автоматического привода звеньев кинематической цепи, при этом оказывается несущественным.
Можно сделать еще два замечания методического характера. В каждой конфигурации МС оператор может реализовать множество различных элементарных операций (отличающихся вектором ). При анализе геометрических свойств — достижимости и манипулятивности — оказывается, что каждой конфигурации МС отвечает единственная элементарная операция (позиционирования либо ориентирования). В этом отношении свойство мнемоничности отличается от других геометрических свойств. Оценку мнемоничности (2) следует формировать как зависящую от конфигурации , а затем строить глобальную оценку как среднее по всему множеству конфигураций. Заметим также, что элементарные операции, вводимые при анализе геометрических и механических свойств, характеризуют мгновенные состояния МС, а элементарная операция перемещения, используемая при рассмотрении мнемоничности и алгоритмических свойств, связана с малым движением, т. е. с переходом от одного состояния к другому. Другими словами, в обоих случаях исследуются вопросы построения движений, анализ которых нельзя проводить в рамках единственного состояния МС.
Свойство мнемоничности копирующих МС, будучи чисто геометрическим, вместе с тем определенным образом «синтезирует» особенности, свойственные рассматриваемым геометрическим, механическим и алгоритмическим свойствам.
Литература 1. Медведев М.С., Лесков А.Г., Ющенко А.С. Системы
управления манипуляционных роботов. М.: Наука, 1978, 173 с.
ВУНЦ ВВС «ВВА имени профессора Н.Е. Жуковского и Ю.А. Гагарина», г. Воронеж
128
УДК 53.087:620.19
М.Н. Давыдов, студент, Ю.С. Ткаченко, д-р техн. наук, проф.
ОСОБЕННОСТИ ВЫЯВЛЕНИЯ РАЗЛИЧНООРИЕНТИРОВАННЫХ В ПРОСТРАНСТВЕ ДЕФЕКТОВ
УЛЬТРАЗВУКОВЫМ МЕТОДОМ, С ПРИМЕНЕНИЕМ АНТЕННЫХ РЕШЕТОК
В данной статье рассмотрены методы определения допустимых раз- лично-ориентированных в пространстве дефектов ультразвуковым методом неразрушающего контроля, с применением цифро-фокусированных антенных решеток
Ключевые слова: неразрушающий контроль, ультразвуковой контроль, антенные решетки, настройка прибора
Одними из наиболее сложных объектов для ультразвукового контроля (УЗК) являются стальные отливки. УЗК отливок имеет свои особенности, такие как:
- сложная форма, разность толщин и кривизна поверхно-
сти;
-сложность определения размеров и ориентации дефектов
визделии.
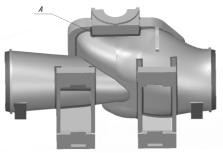
В данной статье рассмотрены особенности УЗК на примере литого корпуса магистрального насоса (рис. 1).
Рис. 1. Корпус магистрального насоса
129