

Повышение эффективности работы автогрейдера за счёт совершенствования системы управления отвалом. Иванов С.А., Кононов А.А
.pdfНа правах рукописи
Иванов Сергей Александрович
Повышение эффективности работы автогрейдера за счёт совершенствования системы управления отвалом
Специальность 05.05.04 – дорожные, строительные и подъёмно-транспортные машины
АВТОРЕФЕРАТ
диссертации на соискание учёной степени кандидата технических наук
Воронеж – 2012

Работа выполнена в Федеральном государственном бюджетном образовательном учреждении высшего профессионального образования «Воронежский государственный архитектурно-строительный университет»
Научный руководитель: - доктор технических наук, доцент,
Кононов Андрей Александрович
Официальные оппоненты: - Баженов Светослав Петрович,
доктор технических наук, профессор, Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Липецкий государственный технический университет», кафедра транспортных средств и техносферной безопасности, профессор
- Пурусов Юрий Михайлович, кандидат технических наук, профессор, Военный авиационный инженерный университет (г. Воронеж), 21 кафедра автомобильной подготовки, профессор
Ведущая организация: Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Воронежская государственная лесотехническая академия»
Защита диссертации состоится 24 мая 2012 г. в 1300 часов на заседании диссертационного совета Д 212.033.01 при Федеральном государственном бюджетном образовательном учреждении высшего профессионального образования «Воронежский государственный архитектурно-строительный университет» по адресу: 394006, г. Воронеж, ул. 20-летия Октября, 84, аудитория 3220,
тел. (факс): (473) 271-59-05.
С диссертацией можно ознакомиться в библиотеке Воронежского ГАСУ.
Автореферат разослан 23 апреля 2012 г.
Учёный секретарь |
|
|
диссертационного совета |
|
Власов Виктор Васильевич |
|
|
|
|
2 |
|
|
|
|
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность работы. В строительстве достаточно важной составляющей является проведение земляных работ, в частности, резания и перемещения грунта, которое в большинстве случаев осуществляется землеройнотранспортными машинами (ЗТМ). Одной из ЗТМ, выполняющей резание и перемещение грунта, является автогрейдер.
Качественное выполнение работ во многом зависит от квалификации оператора, который вынужден одновременно контролировать большое количество непрерывно меняющихся параметров. Однако даже высококвалифицированный оператор оценивает изменение параметров ориентировочно, что часто приводит к режимам работы далёким от рациональных.
Кроме того, до настоящего времени управление процессом резания и перемещения грунта осуществляется в основном изменением скорости движения машины и высотного положения отвала, что приводит к увеличению необходимого количества проходов.
Повышение производительности ЗТМ при резании и перемещении грунта возможно за счёт рационального выбора параметров рабочего процесса с помощью систем автоматического управления.
Многими авторами предложены разнообразные устройства управления рабочим оборудованием и другими системами автогрейдера, но эти разработки, в большинстве случаев, не устраняют полностью описанные выше недостатки в процессе резания и перемещения грунта.
В связи с этим актуальным является создание системы автоматического управления отвалом по параметру, характеризующему текущую производительность автогрейдера в процессе резания и перемещения грунта, использующей в качестве управляющего воздействия изменение угла захвата отвала при его неизменном высотном положении, что не только повысит производительность ЗТМ, но и уменьшит необходимое количество проходов, следовательно, также приведёт к увеличению производительности в целом, экономии топлива и времени на производство работ.
Исходя из вышесказанного можно сформулировать цель диссертационной работы: повышение производительности автогрейдера путём рационального управления косопоставленным отвалом при резании и перемещении грунта за счёт эффективного использования тягово-сцепных качеств.
Для достижения поставленной цели необходимо решить следующие за-
дачи:
1)адаптировать и исследовать математическую модель автогрейдера с колёсной формулой 1х2х3 для процесса резания и перемещения грунта с изменением угла захвата отвала;
2)разработать новый способ бесконтактного измерения текущего объёма грунта, разрабатываемого отвалом ЗТМ, и создать датчик с улучшенными эксплуатационными характеристиками;
3)разработать способ и алгоритм автоматического управления углом захвата основного отвала автогрейдера в процессе резания и перемещения
3
грунта по параметру, характеризующему текущую производительность;
4)разработать и создать экспериментальный макет системы автоматического управления отвалом автогрейдера по оценке относительной производительности с изменением угла захвата отвала;
5)провести экспериментальные исследования работоспособности и эффективности функционирования предложенной системы автоматического управления основным отвалом автогрейдера с управлением углом захвата в процессе резания и перемещения грунта для оценки технико-экономических показателей в различных режимах управления отвалом.
Объект исследований – автогрейдер ДЗ-199 с мощностью двигателя 160 л.с. и колёсной формулой 1х2х3 в процессе резания и перемещения грунта.
Предмет исследований – разработка способа и средств технической реализации эффективного управления косопоставленным отвалом ЗТМ в процессе резания и перемещения грунта с изменением угла захвата.
Научная новизна работы:
-математическая модель автогрейдера с колёсной формулой 1х2х3 в процессе разработки грунта основным косопоставленным отвалом адаптирована к рабочему процессу с изменением угла захвата за счёт определения текущего местоположения точки приложения равнодействующих сил сопротивления перемещению и скольжению грунта по отвалу;
-предложен новый способ бесконтактного измерения текущего объёма грунта, разрабатываемого отвалом ЗТМ, основанный на определении сдвига фаз между током и напряжением, а также изменяющегося сопротивления в контуре антенны;
-разработан способ автоматического управления углом захвата косопоставленного отвала автогрейдера в процессе резания и перемещения грунта по параметру, характеризующему текущую производительность;
-разработаны модели, позволяющие описывать процесс изменения объёма грунта, разрабатываемого косопоставленным отвалом, и оценивать разброс значений ширины полосы разработки грунта при управлении углом захвата по параметру, характеризующему текущую производительность.
Практическая значимость:
-предложена новая схема обработки информации об измеряемом объёме грунта, проведено имитационное моделирование для выбора характеристик измерителя и создан новый датчик текущего объёма грунта, разрабатываемого отвалом ЗТМ, с улучшенными эксплуатационными характеристиками;
-разработан алгоритм управления углом захвата косопоставленного отвала автогрейдера в процессе резания и перемещения грунта по параметру, характеризующему текущую производительность;
-получена зависимость для определения смещения в продольном направлении местоположения точки приложения равнодействующих сил сопротивления перемещению и скольжению грунта относительно точки приложения равнодействующих сил сопротивления резанию грунта от изменения угла захвата отвала автогрейдера;
4
- создана система автоматического управления углом захвата отвала по параметру, характеризующему текущую производительность автогрейдера, применение которой позволило повысить техническую производительность на 11,2 %, снизить расход топлива на 6 % и сократить затраты времени на 10–19 %, уменьшить психофизические нагрузки на оператора ЗТМ, что обеспечивает увеличение времени его высокопроизводительной безошибочной работы в течении смены.
На защиту выносятся:
-математическая модель автогрейдера с колёсной формулой 1х2х3, адаптированная к процессу резания и перемещения грунта косопоставленным отвалом с текущим изменением угла захвата, и результаты теоретических исследований;
-новый способ измерения текущего объёма грунта, разрабатываемого отвалом ЗТМ, и вариант обработки информации;
-способ и алгоритм автоматического управления основным косопоставленным отвалом автогрейдера в процессе резания и перемещения грунта по параметру, характеризующему текущую производительность ЗТМ;
-результаты экспериментальных исследований функционирования ЗТМ и эффективности применения на автогрейдере разработанной системы управления рабочим органом в процессе резания и перемещения грунта.
Результаты работы внедрены: в ООО «Управление автомобильного транспорта и механизации Зодиак» (309500, г.Старый Оскол, Белгородской обл., микрорайон Зелёный Лог, д. 5) путём применения разработанной системы управления основным отвалом автогрейдера; в Воронежском ГАСУ при обучении студентов дневной формы обучения специальности «Автоматизация технологических процессов и производств (в строительстве)» и «Сервис транспортных машин» при изучении учебных дисциплин «Моделирование систем» и «Новые информационные технологии», соответственно, и при проведении научных исследований землеройно-транспортных машин.
Достоверность полученных результатов обеспечена применением ме-
тодов высшей математики, теоретической механики, радиофизики при теоретических исследованиях, математической статистики при планировании эксперимента и обработке информации, хорошим соответствием полученных данных с ранее выполненными исследованиями других авторов и достаточной сходимостью результатов теоретических и экспериментальных исследований.
Апробация работы. Основные результаты работы докладывались на: седьмой международной научно– практической конференции “ Высокие технологии в экологии” ( Воронеж, 2004); второй международной научно– технической конференции “ Информационные технологии в науке, образовании и производстве” ( Орёл, 2006); международной научно-технической конференции “ Измерения в современном мире” ( Санкт-Петербург, 2007); четвертой международной научно-практической конференции “ Электронные средства и системы управления. Опыт инновационного развития” ( Томск, 2007); пятнадцатой международной научно-технической конференции “ Информационная среда ВУЗа” ( Иваново, 2008); на научно-практических конференциях профессорскопреподавательского состава Воронежского ГАСУ (Воронеж, 2006-2011).
5
Публикации. Всего по результатам диссертационных исследований опубликовано 14 работ, в том числе 3 в изданиях из перечня ВАК, получен 1 патент РФ на изобретение, 2 разработки зарегистрированы в отраслевом фонде алгоритмов и программ.
Объём и структура работы. Диссертационная работа состоит из введения, четырёх глав, основных выводов, изложена на 182 страницах и содержит 129 страниц машинописного текста, 3 таблицы, 46 рисунков, список использованных источников из 145 наименований, 6 приложений на 26 страницах.
ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ Во введении обусловлена актуальность темы диссертационной работы,
приведены цель и задачи исследований, обозначен объект исследований, показана научная новизна и практическая значимость результатов, сформулированы основные положения, выносимые на защиту.
Впервой главе проанализированы научные работы отечественных и зарубежных учёных, занимающихся вопросами повышения эффективности функционирования ЗТМ в рабочих режимах, в том числе с использованием автоматического управления рабочим оборудованием.
Вобласти повышения эффективности функционирования ЗТМ в рабочих режимах заметный вклад внесли: Т.В. Алексеева, В.Ф. Амельченко, Г.И. Асмолов, Ю.В. Варковастов, А.М. Васьковский, Д.П. Волков, В.Д. Глебов, С.Н. Деревянко, А.А. Ерофеев, В.А. Жулай, В.А. Зорин, Ю.И. Калинин, А.А. Кононов, Б.Д. Кононыхин, Е.М. Кудрявцев, Э.Н. Кузин, Е.Ю. Малиновский, И.А. Недорезов, В.Н. Тарасов, И.М. Тепляков, Н.А. Ульянов, Ю.Ф. Устинов, А.М. Холодов, В.К. Цветков, Л.Я. Цикерман, Б.Д. Щумаков, Каваути Масатака, Такэдо Онисиро, C.S.Draper, H.W. Rockwell.
Проведённый обзор научно-технической литературы по вопросу применения устройств управления процессом разработки грунта ЗТМ позволяет отметить, что в подходах к повышению эффективности рабочих процессов, выполняемых автогрейдером, можно условно выделить следующие основные направления:
1)учёт неровностей обрабатываемой грунтовой поверхности;
2)совершенствование конструкции элементов автогрейдера;
3)стабилизация пространственного положения отвала или параметров, связанных с траекторией движения машины;
4)выбор рациональных параметров работы ЗТМ.
Все эти направления в той или иной степени служат для повышения тех- нико-экономических показателей в процессе эксплуатации автогрейдеров.
Другие виды систем помогают оператору в визуализации процессов и принятии управленческих решений, значимо не увеличивая производительности и не снижая психофизическую нагрузку на оператора при управлении рабочим органом.
В результате анализа источников выяснено, что в настоящее время отсутствуют промышленно выпускаемые системы автоматического управления рабочим органом ЗТМ при резании и перемещении грунта, одновременно позво-
6
ляющие повысить производительность за счёт более полного использования тяговых возможностей колёсного движителя и добиться высокого качества получаемой поверхности.
Создание системы автоматического управления процессом резания и перемещения грунта автогрейдером является актуальной задачей, имеющей существенное значение для строительной отрасли страны, так как производительность ЗТМ даже при работе оператора высокой квалификации далека от максимально возможной. Применение автоматических систем управления позволяет существенно увеличить производительность ЗТМ по сравнению с ручным управлением при ограниченном энергетическом ресурсе установленного двигателя за счет более полного использования заложенных тяговых качеств колесного движителя, при этом возможно снижение удельного расхода топлива.
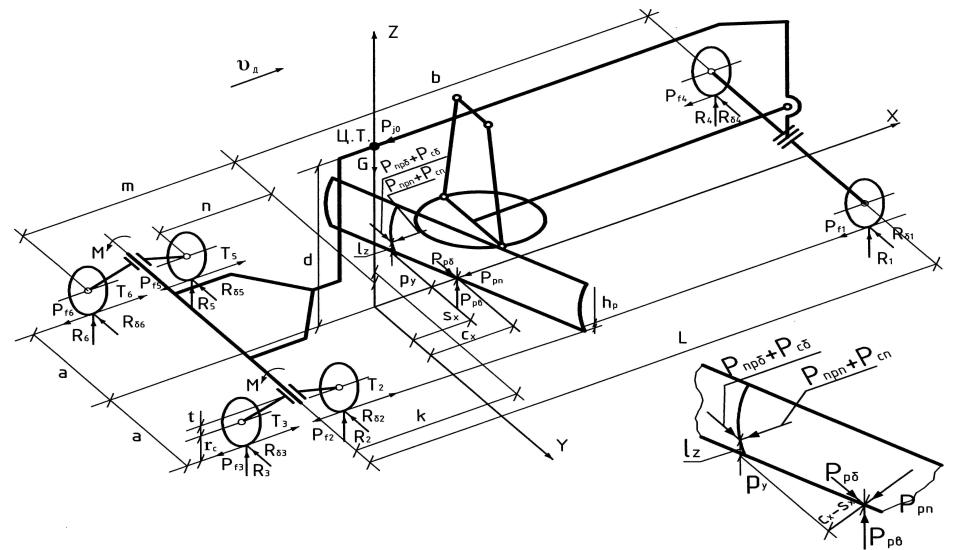
Во второй главе для прямолинейного поступательного движения автогрейдера при резании и перемещении грунта (рис. 1) уравнения действующих сил и моментов записаны следующим образом:
∑ F x = T 2 + T 3 - P f 1 - P f 4 |
- P р п - |
− Pп р п − Рсп − P j 0 + T 5 + T 6 |
(1) |
= 0 , |
∑ F y = Р р б − R б 1 − R б 2 − R
− R б 4 − R б 5 − R б 6 + Р п р б + Р
б3
сб
−
(2)
= 0 ,
∑ F z |
= R 1 + R 2 + R 3 + R 4 + R 5 + R 6 − G + P р в |
= 0 , |
(3) |
|
∑ M x = l z ( Рпрб + Рсб ) − h р ( R б1 + R б4 ) + |
|
(4) |
|
+ a ( R 4 + R 5 + R 6 ) − a ( R 1 + R 2 + R 3 ) = 0 , |
|
|
|
|
|
|
|
∑ M y = b ( R 1 + R 4 ) + c x × Pрв + |
|
|
|
+ М + d P j 0 − n ( R 2 + R 5 ) − m ( R 3 + R 6 |
) + |
(5) |
|
+ h р ( Р f1 + Р f4 ) + l z ( Рпрп + Рсп ) = 0 , |
|
|
|
∑ M z = p y ( Рпрп + Рсп ) + aPf4 − aPf1 + a (T2 + T3 ) − |
|
|
|
− a (T5 + T6 ) − n ( Rб2 + Rб5 ) − m ( Rб3 + Rб6 ) + |
|
(6) |
|
+b ( Rб1 + Rб4 ) − cx Ррб − sx (Рпрб + Рсб ) = 0, |
|
|
|
|
|
|
где Ррп – |
продольная составляющая силы сопротивления грунта резанию, кН; |
||
Рпрп |
– продольная составляющая силы сопротивления перемещению вы- |
||
резанного грунта, кН; |
|
|
|
Рсп – |
продольная составляющая силы сопротивления скольжению грунта |
||
по отвалу, кН; |
|
|
|
Ррб – |
боковая составляющая силы сопротивления грунта резанию, кН; |
|
|
|
7 |
|
|
8
Рис. 1 - Схема сил, действующих на автогрейдер при резании и перемещении грунта
Рпрб – боковая составляющая силы сопротивления перемещению вырезанного грунта, кН;
Рсб – боковая составляющая силы сопротивления скольжению грунта по отвалу, кН;
Рj0 – сила инерции поступательно движущихся масс, кН;
Ррв – вертикальная составляющая силы сопротивления грунта резанию,
кН;
Т2, Т3, Т5, Т6 – сила тяги, развиваемая каждым ведущим колесом, кН; Рf1, Рf4 – силы сопротивления качению ведомых колес, кН;
Rб1 – Rб6 – боковые реакции грунта на колеса движителя, кН;
R1 – R6 – нормальные реакции грунта на колеса автогрейдера, кН; G – сила тяжести автогрейдера, кН;
М – крутящий момент на центральных полуосях балансиров, кН×м;
sx, py, cx, lz, hр, b, n, m, d, a – расстояния, определяющие точки приложения соответствующих сил, м.
Адаптация математической модели автогрейдера для рабочего процесса с поворотом косопоставленного отвала в процессе разработки грунта достигается учетом текущего местоположения точки приложения равнодействующей сил сопротивления перемещению и скольжению грунта по отвалу, которое опреде-
ляется следующими известными зависимостями: |
|
|||
py |
= |
1 |
× B × sinαзх , |
(7) |
|
||||
|
4 |
|
|
|
lz |
= 0,33H + 0,67hр , |
(8) |
||
где рy – расстояние в поперечном направлении, определяющее точку прило-
жения равнодействующих сил сопротивления перемещению и скольжению
грунта, м;
lz – расстояние в вертикальном направлении, определяющее точку приложения равнодействующих сил сопротивления перемещению и скольжению грунта, м;
B – длина косопоставленного отвала, м;
αзх – угол захвата косопоставленного отвала, град; H – высота отвала, м;
и новым уравнением, найденным из геометрических соображений:
cx - sx |
= |
1 |
× B × cosα зх , |
(9) |
|
||||
|
4 |
|
|
|
где cx-sx – расстояние в продольном направлении, определяющее точку приложения равнодействующих сил сопротивления перемещению и скольжению грунта.
Кроме того, разработана модель процесса изменения текущего объёма грунта, разрабатываемого косопоставленным отвалом автогрейдера, предусматривающая учёт текущего изменения угла захвата (фрагмент модели представлен на рис. 2).
9
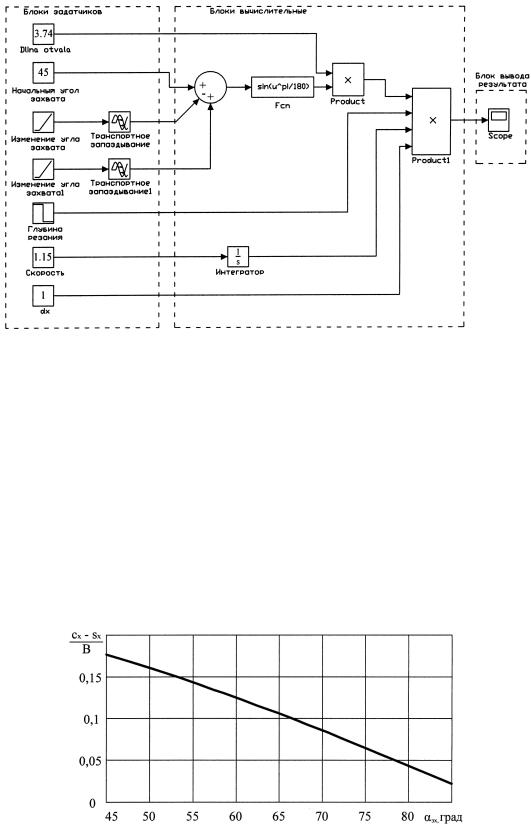
Рис. 2 – Фрагмент модели, описывающей процесс изменения текущего объёма грунта, разрабатываемого косопоставленным отвалом автогрейдера, в пакете SIMULINK программного комплекса MATLAB
В качестве некоторых результатов моделирования, проведенного на ЭВМ, на рис. 3-6 представлены графики зависимости смещения в продольной плоскости точки приложения равнодействующих сил сопротивления перемещению и скольжению грунта относительно точки приложения равнодействующих сил сопротивления резанию грунта от угла захвата отвала автогрейдера, зависимости силы тяги (а также коэффициента буксования) колесного движителя от угла захвата при различной толщине срезаемой стружки для автогрейдера ДЗ-199, зависимости между боковыми реакциями, действующими на ведущие и ведомые колёса автогрейдера, и углом захвата основного отвала ДЗ–199.
Рис. 3 - Зависимость смещения в продольной плоскости точки приложения равнодействующих сил сопротивления перемещению и скольжению грунта относительно точки приложения равнодействующих сил сопротивления резанию грунта
от угла захвата отвала автогрейдера
10