

Обыкновенные дифференциальные уравнения с приложениями к математическим моделям специальных дисциплин. Бырдин А.П., Сидоренко А.А
.pdfгде |
|
|
|
|
|
|
|
|
|
радиус - вектор точки, t - время, |
||||||||
|
|
x(t)i y(t) j z(t)k |
|
|||||||||||||||
r |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
d 2 |
|
|
|
|
|
|
dr |
|
|
|
v |
- скорость точки, |
r |
|
a |
- ускорение. Записанное |
||||||||
|
dt |
|
dt 2 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
уравнение выражает второй закон Ньютона. Спроектируем действующую на точку силу на оси декартовой системы координат:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
dr |
|
|
|
|
|
dr |
|
|
|
|
|
t, |
|
, |
dr |
|
|
|
|
|
|
t, |
|
, |
dr |
|
|
|
|
|||||||||
F t, |
|
, |
|
|
f t, |
|
, |
|
i f |
|
|
|
|
|
j |
f |
|
|
|
k . |
|||||||||||||||||||||||
r |
r |
2 |
r |
3 |
r |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
dt |
1 |
|
|
|
dt |
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
dt |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
Подставив разложения |
|
|
и F в |
уравнение |
(5.2), |
|||||||||||||||||||||||||||||||||||||
|
r |
||||||||||||||||||||||||||||||||||||||||||
приравняя |
проекции на координатные оси. Получим систему |
||||||||||||||||||||||||||||||||||||||||||
трех уравнений: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
m |
d 2 x |
|
|
f1(t, x, y, z, x, y, z), |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
dt 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
m |
d 2 y |
|
|
f 2 (t, x, y, z, x, y, z), |
|
|
|
|
|
|
|
|
|
(5.3) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
dt 2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
m |
d 2 z |
|
|
f3 (t, x, y, z, x, y, z), |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
dt 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где точка |
над буквой обозначает производную по t . Каждое |
||||||||||||||||||||||||||||||||||||||||||
из уравнений системы (5.3) является дифференциальным уравнением второго порядка. Для приведения системы к
нормальному виду введем функции u x , |
v y , |
w z - |
||||
|
|
|
|
|
|
|
проекции скорости |
dr |
|
на координатные |
оси. |
Получим |
|
dt |
|
|||||
|
|
|
|
|
||
систему уравнений вида
x mu mv mw
u, y v, z w,
 f1 (t, x, y, z, u, v, w),
f1 (t, x, y, z, u, v, w),
 f 2 (t, x, y, z, u, v, w),
f 2 (t, x, y, z, u, v, w),  f3 (t, x, y, z, u, v, w).
f3 (t, x, y, z, u, v, w).
150
При этом обычно задаются начальное положение точки
|
|
(t0 ) |
|
|
x0 , y0 , z0 |
и |
начальная |
скорость |
|||||||
r |
r0 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
dr |
(t0 ) |
|
|
r |
u |
0 |
, v |
0 |
, w . |
|
|
|||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
dt |
0 |
|
|
|
0 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Подобным образом и одному дифференциальному уравнению высшего порядка можно сопоставить систему дифференциальных уравнений первого порядка.
Система уравнений (5.1) называется линейной системой дифференциальных уравнений, если правые части зависят линейно от некоторых функций y1, y2 , , yn :
|
dy1 |
|
|
a11 |
(x) y1 |
|
|
a12 (x) y2 |
a1n (x) yn |
f1(x), |
|
|
|
dx |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dy2 |
|
|
a21(x) y1 |
|
|
a22 (x) y2 |
a2n (x) yn |
f 2 (x), |
|
||
|
dx |
|
|
|
|
(5.4) |
||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|||||||||||
|
dyn |
|
|
an1(x) y1 |
|
|
an2 (x) y2 |
ann (x) yn |
f n (x), |
|
||
|
dx |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
где aij (x) и |
fi (x) |
(i, j 1,2, , n) - заданные функции от x . |
||||||||||
|
Если правые части системы (5.1) не зависят явно от |
|||||||||||
независимой переменной x , т.е. если система имеет вид |
|
|||||||||||
|
|
|
|
|
|
dy1 |
|
|
f1( y1, y2 , , yn ), |
|
|
|
|
|
|
|
|
|
dx |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dy2 |
|
|
f 2 ( y1, y2 |
, , yn ), |
|
|
|
|
|
|
|
|
dx |
|
|
|
(5.5) |
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
dyn |
|
|
f n ( y1, y2 |
, , yn ), |
|
|
|
|
|
|
|
|
dx |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
то она называется автономной или стационарной системой.
Если в линейной системе (5.4) f1(x)  f 2 (x)
f 2 (x)  f n (x) 0 ,
f n (x) 0 ,
то имеем линейную автономную систему.
151
2. Решение системы. Геометрическое и механическое
истолкования нормальной системы. |
|
|
Совокупность |
n функций y 1(x), , y |
n (x), |
определенных и непрерывно дифференцируемых в интервале (a,b) , называется решением системы (5.1) в этом интервале, если она обращает все уравнения системы в тождества:
|
1(x) |
f1(x, |
1(x), |
2 (x), , n (x)), |
||||
|
2 (x) |
f 2 (x, |
1(x), |
2 (x), , n (x)), |
||||
|
||||||||
|
n (x) |
f n (x, |
|
1(x), |
2 (x), , n (x)), |
|||
справедливые при всех значениях x |
из интервала (a,b) . |
|||||||
Пример. |
Система уравнений |
|
||||||
|
|
|
|
dy |
7 y |
6z, |
||
|
|
|
|
|
|
|||
|
|
|
|
dx |
||||
|
|
|
|
|
|
|
||
|
|
|
|
dz |
|
6 y |
7z, |
|
|
|
|
|
|
|
|||
|
|
|
|
dx |
||||
|
|
|
|
|
|
|
||
имеет решение |
y |
e x , |
|
z |
|
ex . |
В этом можно убедиться, |
|
|
1 |
|
1 |
|
|
|
||
подставив эти функции в уравнения системы: |
||||||||
ex 7ex |
6ex , |
|
e x |
6e x 7e x . |
||||
Мы получили тождества, справедливые при x ( ; ) . Эта же система имеет и другие решения. Например, решением,
является другая совокупность функций: y2 |
e13x , z2 |
e13x |
||||||
при |
x ( |
; ) . |
Решением этой системы будет являться и |
|||||
двухпараметрическое |
семейство |
функций: |
y |
Ae x |
Be13x , |
|||
z |
Ae x |
Be13x , |
A |
и B – |
произвольные |
постоянные. |
||
Действительно, подставив эти функции в уравнения системы, получим:
Ae x |
13Be13x |
7(Ae x |
Be13x ) |
6( |
Ae x |
Be13x ) , |
Ae x |
13Be13x |
6(Ae x |
Be13x ) |
7( |
Ae x |
Be13x ). |
152

Эти уравнения удовлетворяются тождественно относительно x при любых числовых значениях параметров A и B.
Рассмотренный пример системы двух уравнений наводит на мысль, что всякая система двух уравнений имеет решение,
содержащее два произвольных параметра. |
|
||||
|
|
Перейдем к геометрическому истолкованию нормальной |
|||
системы. |
|
|
|
||
|
|
Изучая |
дифференциальные |
уравнения |
1-го порядка |
|
dy |
f (x, y) |
и рассматривая |
x, y как |
прямоугольные |
|
|
||||
|
dx |
||||
|
|
|
|
|
|
координаты, мы установили, что такие уравнения задают на плоскости XOY некоторое поле направлений и что направление касательной в каждой точке интегральной кривой y  (x) совпадает с направлением поля в этой точке. Аналогичную геометрическую интерпретацию можно дать и нормальной системе n дифференциальных уравнений (5.1).
(x) совпадает с направлением поля в этой точке. Аналогичную геометрическую интерпретацию можно дать и нормальной системе n дифференциальных уравнений (5.1).
Будем |
рассматривать |
(x, y1, , yn ) |
как координаты |
|||
точки в (n |
1) - |
мерном |
пространстве |
x, y1, , yn . Тогда |
||
решению |
y |
1(x), y |
2 (x), , y |
n (x) соответствует |
||
кривая в введенном (n |
1) - мерном пространстве. Эта кривая |
|||||
называется интегральной кривой системы (5.1). |
||||||
Пусть |
функции |
f1(x, y1, y2 , , yn ) , |
f 2 (x, y1, y2 , , yn ) , |
|||
, f n (x, y1, |
y2 , , yn ) |
в системе (5.1) определены и конечны |
||||
в некоторой области D изменения переменных x, y1, , yn . В
каждой точке M (x, y1, , yn ) |
D проведем |
отрезок |
прямой |
||
с |
направляющим |
|
вектором |
||
s |
1, f1(x, y1, y2 , , yn ), , f n (x, y1, y2 , , yn ) . |
|
Тогда |
||
получим поле направлений |
в области D |
(n |
1) - |
мерного |
|
пространства. Интегральная кривая в каждой своей точке касается вектора поля
(dx : dy1 : dy2 : : dyn 1 : f1 : f2 : fn ).
153
Если в точке M 0 (x0 , y1(x0 ), , yn (x0 )) |
все правые части |
|||||
системы (5.1) или некоторые |
из |
них |
обращаются |
в |
||
неопределенные выражения вида |
|
0 |
, то в этой точке поле |
|||
0 |
||||||
|
|
|
|
|||
направлений не определено и через такую точку не проходит ни одна интегральная кривая.
Рассмотрим механическое истолкование нормальной системы.
Если дифференциальные уравнения описывают движение механической системы, то независимую переменную обозначают t , искомые функции через x1, , xn ,
а производные этих функций по времени t обозначают xk
(k 1,2, , n) . В |
этих обозначениях нормальная система |
||
уравнений (5.1) записывается так: |
|
||
x1 |
X1(t, x1, x2 , , xn ), |
|
|
x2 |
X 2 (t, x1, x2 , , xn ), |
(5.6) |
|
|
|||
|
|||
xn |
X n (t, x1, x2 , , xn ). |
|
|
Вевклидовом пространстве с прямоугольными
координатами |
x1, x2 , , xn |
решение |
системы |
|
x1 |
1(t), , xn |
n (t) определяет |
закон движения или |
|
движение по некоторой траектории с течением времени |
t . |
|||||||||||||
Если ввести n - мерный вектор |
|
|
x1(t), x2 (t), , xn (t) |
|
, |
то |
||||||||
rn |
|
|||||||||||||
его производная по |
|
времени |
r (t) |
x |
(t), , x |
n |
(t) |
|||||||
|
|
|
|
|
|
|
|
|
n |
1 |
|
|
|
|
интерпретируется как скорость движения точки в |
n - мерном |
|||||||||||||
пространстве, xk (t) (k |
1,2, , n) - проекции вектора скорости |
|||||||||||||
на координатные оси. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При такой интерпретации, естественной |
в физических и |
|||||||||||||
механических задачах, система (5.6) или в векторной форме |
|
|||||||||||||
|
r |
|
|
|
|
) , |
|
|
|
(5.7) |
||||
|
F (t, |
|
|
|
|
|||||||||
|
r |
|
|
|
||||||||||
|
n |
|
|
|
n |
|
|
|
|
|
|
|||
154
где F (t, rn )  X1(t, x1,..., xn ), , X n (t, x1,..., xn ) , обычно называется динамической системой, пространство с
X1(t, x1,..., xn ), , X n (t, x1,..., xn ) , обычно называется динамической системой, пространство с
координатами |
x1, x2 ,..., xn |
|
|
|
называется |
фазовым |
||||
пространством, |
кривая |
|
|
|
|
|
(t) |
называется |
фазовой |
|
r |
r |
|||||||||
траекторией. |
В |
случае |
n 2 |
фазовое пространство |
||||||
называется фазовой плоскостью. |
|
|
||||||||
Если функции |
X k |
(k |
1,2,..., n) в системе |
(5.6) или |
||||||
вектор-функция F в векторном уравнении (5.7) не зависят от времени t , то система (5.6), или (5.7), называется автономной
динамической системой. |
|
|
|
|
||
|
Взаимосвязь между траекторией и движением состоит в |
|||||
том, |
что |
траектория |
есть |
проекция |
движения |
|
(расположенного в пространстве |
t, x1, x2 ,..., xn ) |
в |
||||
пространство x1, x2 ,..., xn . |
|
|
|
|
||
|
Таким |
образом, |
решение |
системы |
(5.6) |
- |
x1 |
1(t), x2 |
2 (t), , xn |
n (t) , |
понимается |
как |
|
параметрические уравнения траектории движения (в
пространстве x1, x2 ,..., xn ). Эти уравнению определяют
траекторию как однопараметрическое геометрическое место точек; они показывают, как происходит движение точки по траектории с течением времени. В соответствии с этим
решение системы x1 |
1(t), x2 |
2 (t), , xn |
n (t) обычно в |
механике называют движением. |
|
|
|
Основной задачей |
интегрирования системы (5.6) или |
||
(5.7) является нахождение всех движений, определяемых этой системой и изучение свойств движений.
Пример. Пусть задана система уравнений x y, y  x . Можно убедиться непосредственной подстановкой в
x . Можно убедиться непосредственной подстановкой в
уравнения, |
что |
семейство |
функций |
x |
C1 cos(t |
C2 ) , |
||
y |
C1 sin(t |
C2 ) |
является |
решением |
заданной |
системы |
||
уравнений. На фазовой плоскости |
XOY |
фазовыми |
||||||
траекториями является семейство окружностей |
x2 |
y2 |
C 2 |
|||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
155 |
|
|
|
|
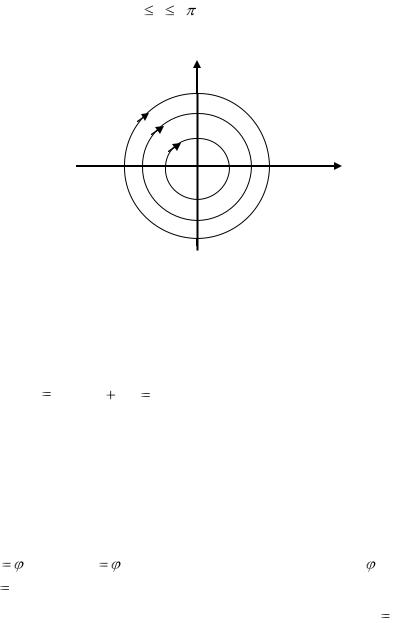
с центром в начале координат. Придавая параметру t числовые значения 0 t 2 , будем иметь перемещение точки по определенной траектории в направлении, показанном на рис. 10.
Рис. 10 Фазовые траектории системы
Отметим, что уравнение траектории на фазовой плоскости не зависит от C2 . Поэтому все движения при фиксированном C1 происходят по одной и той же траектории.
При C1 0 ( x2 y2 0 ) фазовая траектория состоит из
одной точки (точки О), называемой в этом случае точкой покоя системы.
5.2. Задача Коши. Достаточные условия существования и единственности решения задачи Коши. Общее, частное
иособое решения
1.Задача Коши для системы вида (5.1) ставится так:
среди всех |
решений |
системы найти |
такое |
решение |
||||
y1 |
1(x), , yn |
n (x) , |
в котором |
функции |
k (x) |
|||
(k |
1,2, , n) |
принимают |
заданные |
числовые |
значения |
|||
y1(0) , y2(0) , , yn(0) |
при |
заданном числовом |
значении x x0 |
|||||
независимой переменной: |
|
|
|
|
||||
156
|
1(x0 ) |
y1(0) , , |
n (x0 ) |
yn(0) . |
|
|
|
Совокупность |
чисел |
x0 , y1(0) , , yn(0) |
называется |
||||
начальными |
данными решения |
y1 |
1(x), , yn |
n (x) ; |
|||
число x0 |
называют |
начальным |
значением |
независимой |
|||
переменной; числа y1(0) , , yn(0) называются начальными
значениями искомых функций (начальные значения решения). Геометрический смысл задачи Коши заключается в том,
что среди всех интегральных кривых системы разыскивается та, которая проходит через заданную точку (x0 , y1(0) , , yn(0) ) .
Остановимся |
на механическом |
истолковании задачи |
Коши для нормальной системы (5.6): |
|
|
xk |
X k (t, x1, , xn ) (k |
1,2, , n) . |
Задача Коши состоит в том, чтобы из всех движений, определяемых этой динамической системой, найти такое движение x1  1(t), x2
1(t), x2  2 (t), , xn
2 (t), , xn  n (t) , в котором
n (t) , в котором
при t t0 x1 x1(0) , x2 x2(0) , , xn xn(0) ,
т.е. движущаяся |
точка |
в заданный |
момент |
времени t t0 |
|||||
находится |
в |
заданной |
точке |
фазового |
пространства |
||||
M 0 (x1(0) , x2(0) , , xn(0) ) . |
|
|
|
|
|||||
|
Совокупность |
чисел |
t0 , x1(0) , , xn(0) |
называется |
|||||
начальными |
|
|
данными |
движения; |
условия |
||||
x |
x(0) , , x |
n |
x(0) |
|
называются |
начальными условиями |
|||
1 |
1 |
|
n |
|
|
|
|
|
|
этого движения; t0 - начальным моментом времени; точка M 0 (x1(0) , , xn(0) ) - называется начальной точкой.
Пример. Найти решение автономной динамической системы
157
x y, y x,
удовлетворяющее начальным условиям: t0 0, x0 2, y0 1.
Решение. До сих пор мы не излагали систематические методы получения решений систем дифференциальных уравнений. Представленная в примере система обладает особенностью, позволяющей найти ее решение без привлечения специальных методов. Сложив уравнения системы, а затем, вычитая из 1-го уравнения второе, получим следующую систему уравнений:
|
d (x |
y) |
(x y), |
|
|
|
|
|
dt |
||
|
|
||
|
d (x |
y) |
(x y). |
|
|
|
|
|
dt |
||
|
|
||
Видим, что новая система представляет собой систему |
|||
независимых уравнений |
относительно функций (x y) и |
||
(x y) . Интегрируя уравнения, получим:
|
d (x |
y) |
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
C , |
|
ln(x |
y) |
t |
~ |
|
|
x |
y |
C et , |
|
|||||
|
(x |
y) |
|
|
|
|
||||||||||||||
|
|
1 |
|
C , |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
d (x |
y) |
|
~ |
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
t . |
|
|
|
ln(x |
y) |
t |
C2 |
, |
|
x |
y |
C |
|
e |
|||||||
|
(x |
y) |
t |
C2 |
, |
|
|
|
|
|
|
2 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Из начальных условий, полагая t |
0, |
x(0) |
2 , |
y(0) |
1, |
||||||||||||||
получим C1 3, |
C2 |
1. |
Подставив найденные постоянные в |
|||||||||||||||||
выражения для |
(x |
y) |
и |
(x |
y) , |
сложив, |
а затем вычтя их |
|||||||||||||
друг из друга, получим |
x |
|
1 |
(3et |
e |
t ), |
y |
|
1 |
(3et |
e t ) . |
|
||||||||
2 |
2 |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Уравнение фазовой траектории имеет вид: x2 y2 3 .
Это гипербола на плоскости XOY .
2*. Достаточные условия существования и единствен-
ности решения задачи Коши. В этом разделе мы приведем без доказательства и в упрощенной формулировке основную
158
теорему существования и единственности решений для системы (5.1).
Теорема (Пикара Э., 1856-1941, французский математик, почетный член АН СССР, 1924).
Пусть дана система уравнений (5.1)
dyk |
fk (x, y1 |
, , yn ) (k |
1,2, , n) |
|
dx |
||||
|
|
|
и поставлены начальные условия |
y |
y(0) |
, y |
2 |
y(0) |
, , y |
n |
y(0) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
2 |
|
n |
||||
при |
x |
x0 . |
Пусть |
функции |
f k (x, y1, , yn ) |
|
(k 1,2, , n) |
||||||||||||
определены в замкнутой ограниченной области |
D |
(n |
1) - |
||||||||||||||||
мерного пространства: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
y (0) |
|
|
|
y (0) |
|
|
|
|
|||
|
|
x |
x |
0 |
|
a , |
y |
b, , |
y |
|
|
b , |
|
|
|||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
1 |
1 |
|
|
|
n |
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
a и |
b |
- |
|
заданные |
положительные |
числа |
с |
точкой |
|||||||||||
M 0 (x0 , y1(0) , , yn(0) ) |
внутри |
D |
и |
удовлетворяют |
в |
D |
|||||||||||||
условиям:
функции f k (x, y1, , yn ) (k 1,2, , n) непрерывны по всем аргументам и потому ограничены
|
|
|
|
fk (x, y1, , yn ) |
|
M |
(k |
1,2, , n), |
|
|
|||
где |
M - положительное число, |
M (x, y1, , yn ) |
D ; |
|
|
||||||||
|
функции |
f k (x, y1, , yn ) |
(k |
1,2, , n) |
|
имеют |
|||||||
ограниченные частные производные |
|
|
|
|
|
||||||||
|
|
|
|
fk (x, y1, , yn ) |
|
K |
(k,l |
1,2, , n), |
|
|
|||
|
|
|
|
|
|
|
|||||||
|
|
|
|
yl |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
K - положительное число, |
M (x, y1, , yn ) |
D . |
|
|
||||||||
|
Тогда система имеет единственное решение |
|
|
||||||||||
|
|
|
|
y1 |
1(x), , yn |
n (x) , |
|
|
|
|
|||
удовлетворяющее начальным условиям |
y |
y (0) |
, , y |
n |
y (0) |
||||||||
|
|
|
|
|
|
|
|
|
1 |
1 |
|
n |
|
при |
x x0 . |
Это |
решение |
определено |
и |
непрерывно |
|||||||
159