

Методическое пособие 567
.pdf
|
Параметр 32 |
Параметр 35 |
|
|
АЦП |
G |
|
|
|
|
|
|
|||
AN1 АЦП S1 |
|
ПИД- |
|
ШИП |
M |
||
|
|
|
|
регулятор |
|||
|
|
|
К |
|
|
||
|
|
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
AN2 |
АЦП |
S2 |
|
EN |
|
|
|
|
|
|
|
|
|
|
|
|
|
SrcParam |
|
Внешнее |
|
||
|
|
|
управление |
|
|||
|
|
|
|
|
|||
|
Sоп |
|
|
|
EnRot |
|
|
|
|
|
|
|
|
||
Параметр 31 |
|
Программное |
|
||||
|
управление |
|
|||||
|
|
|
|
|
|||
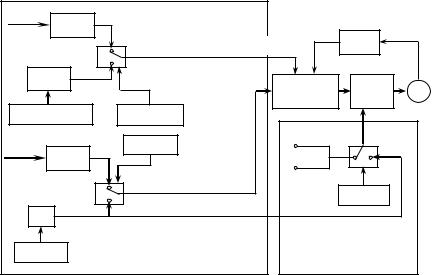
Рис. 9. Выбор сигналов и команд управления в режиме Сл Таблица 5
SrcParam |
Описание состояния |
0Уровень опорного сигнала задаётся параметром
31
1Уровень опорного сигнала задаётся аналоговым сигналом на входе AN2
Выбор источника команды разрешения слежения определяется состоянием флага IntrfEn в регистре конфигурации блока управления.
В табл. 6 приведено описание работы флага IntrfEn. Таблица 6
IntrfEn |
Описание состояния |
0Разрешение слежения определяется сигналом на цифровом входе EN
1Начало слежения задаётся командой EnRot по интерфейсу RS-485
31
Режим ограничения момента на валу двигателя
Режим стабилизации момента позволяет реализовать стабилизацию скорости вращения двигателя по сигналам про- тиво-ЭДС; при этом ограничение момента двигателя может осуществляться одним из следующих способов:
внешним аналоговым сигналом; внешним потенциометром; командами по интерфейсу RS-485.
Скорость и направление вращения может задаваться: внешними потенциометром и кнопками; внешним аналоговым и дискретными сигналами; командами по интерфейсу RS-485.
Сигналы и команды управления режима М схематично представлены на рис. 10.
AN2 |
АЦП S2 |
|
|
|
|
|
|
|
|
|
Ограничение скорости |
|
АЦП |
|
|
ωд max |
|
|
ПИД- |
ШИП |
M |
||
|
|
|
|
регулятор |
|||
|
|
|
|
|
|
||
Параметр 36 |
|
SrcParam |
|
|
|
|
|
|
|
|
IntrfVal |
|
Forw |
|
|
AN1 |
АЦП S1 |
|
Rev |
|
|
||
|
|
|
|
||||
|
|
|
Величина момента |
|
|
IntrfDir |
|
|
|
|
|
|
|
|
|
Мд |
|
|
|
Управление |
|
||
|
|
|
|
|
|
||
SetRot |
Управление скоростью |
|
направлением |
|
|||
|
|
|
вращения |
|
|||
|
|
|
|
|
|
||
Рис. 10. Выбор сигналов и команд управления в режиме М |
|||||||
Величина момента формируется либо непосредственно с аналогового входа AN1, либо командой SetRot. Выбор источника величины момента определяется состоянием флага IntrfVal в регистре конфигурации блока управления (табл. 7).
32

Таблица 7
IntrfVal |
Описание состояния |
0Величина момента двигателя формируется непосредственно с аналогового входа AN1
1Величина момента двигателя задаётся значением параметра Data команды SetRot
Ограничение максимальной скорости вращения двигателя задается либо величиной параметра 36, либо непосредственно формируется с аналогового входа AN2 блока управления. Выбор способа задания максимальной скорости определяется состоянием флага SrcParam в регистре конфигурации и описан в табл. 8.
Таблица 8
SrcParam |
Описание состояния |
0Максимальная скорость вращения двигателя определяется значением параметра 36
1Максимальная скорость вращения двигателя задаётся уровнем сигнала на аналоговом входе AN2
Направление вращения двигателя задается либо знаком параметра Data команды SetRot, передаваемой по интерфейсу RS-485, либо непосредственно подается на цифровой вход Forw или Rev. Выбор способа управления направлением определяется состоянием флага IntrfDir и описан в табл. 9.
Таблица 9
IntrfDir |
Описание состояния |
0Направление вращения определяется состоянием цифровых входов Forw и Rev
1Направление вращения определяется знаком значения параметра Data команды SetRot
33
ПРЕДВАРИТЕЛЬНОЕ ЗАДАНИЕ
1.Получить выражения для определения дискретной передаточной функции цифрового регулятора.
2.Изучить условия реализуемости желаемой динамики цифрового контура регулирования при заданном объекте.
3.Освоить процедуру синтеза требуемой динамики цифрового контура.
РАБОЧЕЕ ЗАДАНИЕ
1.Запустить программу AWD10_Setup, на вкладке «Порт» установить COM порт – 6, адрес устройства – 1.
2.Перейти на вкладку «Графики», установить время обновления 100 мс и получение графиков аналоговых сигналов на входах Авх.1 и Авх.2.
3.Перейти на вкладку «Режим» и установить следующие параметры режима работы блока управления:
1) слежение за внешним сигналом;
2) не использовать сигналы от концевых выключателей;
3) не удерживать двигатель при срабатывании концевого выключателя;
4) не удерживать двигатель при остановке вращения;
5) управлять разрешением вращения через интерфейс
RS-485;
6) управлять скоростью с помощью внешних сигналов;
7) управлять направлением с помощью внешних сиг-
налов;
8) использовать аналоговый вход № 2. Нажать кнопку «Запись».
4.Переключатель задания направления вращения, находящийся в левой части стенда, установить в среднее положение.
5.Настроить коэффициента ПИД-регулятора:
1)перейти на вкладку «Настройка» и обнулить дифференциальный коэффициент регулятора;
2)установить пропорциональный и интегральный коэффициенты регулятора равными 10.
34
6.Перейти на вкладку «Графики». Проверить систему с тахогенератором на стабильность, задавая различные значения скорости изменением аналогового сигнала за счет вращения ручки потенциометра, находящегося в левой части стенда. Записать полученные графики сигналов на входах Авх.1 (сигнал задания скорости) и Авх.2 (фактическая скорость).
7.Перейти на вкладку «Режим» и установить “использовать параметр № 31” вместо “использовать аналоговый вход
№2” . Нажать кнопку «Запись».
8.Получить и записать переходную характеристику системы без отрицательной обратной связи по скорости.
9.Перейти на вкладку «Режим» и установить следующие параметры режима работы блока управления:
1) ограничение момента;
2) не использовать сигналы от концевых выключателей;
3) не удерживать двигатель при срабатывании концевого выключателя;
4) не удерживать двигатель при остановке вращения;
5) управлять разрешением вращения через интерфейс
RS-485;
6) управлять скоростью через интерфейс RS-485;
7) управлять направлением через интерфейс RS-485;
8) использовать параметр № 31.
Нажать кнопку «Запись».
10.Перейти на вкладку «Скорость». Проверить систему на стабильность, задавая различные значения момента (0, 1, 2, 3, 4, 5, 6, 7, 8, 7, 6, 5, 4, 3, 2, 1, 0) и записать полученные графики скорости, перейдя на вкладку «Графики».
11.Временные диаграммы изменения тока при различных значениях момента снять с помощью осциллографа С1-83.
12.Перейти на вкладку «Режим» и установить “управлять скоростью с помощью внешних сигналов” вместо “управлять скоростью через интерфейс RS-485” и “управлять направлением с помощью внешних сигналов” вместо “управлять направлением через интерфейс RS-485”. Нажать кнопку «Запись».
35
13.Перейти на вкладку «Графики». Проверить систему ограничения момента на стабильность, задавая различные значения момента изменением аналогового сигнала за счет вращения ручки потенциометра, находящегося в левой части стенда. Использовать переключатель задания направления вращения, находящийся в левой части стенда. Записать полученные графики аналоговых сигналов на входах Авх.1 (сигнал задания величины момента) и Авх.2 (фактическая скорость).
14.Составить отчет по работе.
СОДЕРЖАНИЕ ОТЧЕТА
1.Цель работы.
2.Рабочее задание.
3.Схемы выбора сигналов и команд управления в режимах Сл и М.
4.Переходные процессы изменения скоростей и токов, построенные в соответствии с рабочим заданием.
5.Анализ результатов и выводы.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Условие определения дискретной передаточной функции цифрового регулятора.
2.Процедура синтеза цифрового регулятора.
3.Условия реализуемости желаемой динамики цифрового контура регулирования.
4.Получение передаточной функции цифрового регулятора в соответствии с уравнением реализуемости заданной динамики.
5.Возможности подрежима слежения за внешним аналоговым сигналом.
6.Описание состояния флага SrcParam.
7.Описание работы флага IntrfEn.
8.Возможности режима ограничения момента на валу двигателя.
9.Описание состояния флага IntrfVal.
10.Описание работы флага IntrfDir.
36
ЛАБОРАТОРНАЯ РАБОТА № 3
УПРАВЛЕНИЕ МНОГОКООРДИНАТНЫМ СЛЕДЯЩИМ ЭЛЕКТРОПРИВОДОМ
Цель работы: изучение программы интерполяции задающих сигналов по методу кубических сплайнов и приобретение практических навыков управления многокоординатным электроприводом.
ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
В соответствии с требованиями технологического процесса формируется массив значений координат qj электропривода в ряде опорных точек на траектории движения. Интерполяция траектории между опорными точками при планировании движения осуществляется с помощью сплайн-функций [1] [4].
Рассмотрим задачу о приближении функции qj (t ) на отрезке времени дижения [0, T ]. Отрезок разбит на части
[t0 ,t1], [t1,t2 ],..., [ts 1,ts ],..., [tm 1,tm ], |
(46) |
причем t0 0, tm T.
Сплайном S (qj ,t) порядка  называется функция, являющаяся многочленом степени
называется функция, являющаяся многочленом степени  на каждом из временных интервалов [ts 1 , ts ] :
на каждом из временных интервалов [ts 1 , ts ] :
S  (q j , t) Pj ,s
(q j , t) Pj ,s (t) a j ,s 0 a j ,s1t ... a j ,s
(t) a j ,s 0 a j ,s1t ... a j ,s t
t , ts 1 t ts , (47)
, ts 1 t ts , (47)
удовлетворяющая условиям непрерывности самой функции и непрерывности ее производных до порядка –1 в точках t1, t2, ... , tm –1:
P(k)j,s (ts) = P(k)j,s +1, (ts) |
(48) |
при k = 0 , ... , –1, s = 1, 2 , ... , m– 1.
Интерполяция траектории кубическими полиномами, обеспечивающими непрерывность первых двух производных в узловых точках, называется кубическим сплайном. Преимуществом такой интерполяции является то, что относительно
37

низкая степень полинома сокращает вычислительные затраты и в то же время сигналы задания перемещений, скоростей и ускорений являются непрерывными.
Кубический сплайн записывается следующим образом:
Pj , s 3 (t )=aj , s 0 +aj , s 1 t+a j , s 2 t2 +aj , s 3 t3 , ts–1<t<ts. (49)
Число параметров a j, s , подлежащих определению, равно 4m, а число условий пока равно 3m–1: 2m условий непрерывности и приближения
Pj ,s3 (ts ) |
Pj ,s 1,3 (ts ), |
s |
1, 2,..., m 1, |
(50) |
|
Pj ,13 (t0 ) |
q j ,0 , Pj ,s3 (ts ) |
q j ,s , |
s 1, 2,..., m, |
||
|
и m–1 условий непрерывности первой производной по времени от кубического сплайна (сигнала задания скорости)
Pj ,s3 (ts ) |
Pj ,s 1,3 (ts ), |
s 1, 2,..., m 1, |
(51) |
|
|
|
|
Кроме этого, имеется m–1 условий непрерывности сигнала задания ускорения
Pj ,s3 (ts ) |
Pj ,s 1,3 (ts ), |
s 1, 2,..., m 1, |
(52) |
|
|
|
|
а также требуемые граничные условия.
Если никаких дополнительных условий на концах траектории не накладывается, то принимаются следующие граничные условия для ускорения:
Pj ,13 (t0 ) |
Pj ,m3 (tm ) 0. |
(53) |
|
|
|
Однако необходимо учитывать практические потребности. Если движение начинается из состояния покоя и заканчивается состоянием покоя, то, прежде всего, необходимо потребовать наложения условий на начальную и конечную скорость
Pj ,13 (t0 ) |
Pj ,m3 (tm ) 0 |
, |
(54) |
|
|
|
|
но тогда ограничение на ускорения (53) в общем случае не будет выполняться. Одновременное выполнение условий (53) и
38

(54) в общем случае невозможно при использовании только кубических сплайнов: ограничений оказывается больше, чем определяемых параметров. Поэтому задачу решают с граничными условиями (54), а возникающие при этом ненулевые ускорения устраняют путем добавления к первому и последнему сплайнам специальных функций. Например, вместо Pj , 1 3 (t ) и Pj , m 3 (t ) можно взять на первом и последнем отрезках траектории многочлены пятого порядка
|
Pj , 1 5 (t )=Pj , 1 3 |
(t)+cj 1 (t–t0 )2 (t1 –t )3 / (t1 –t0 )3 , |
(55) |
|||
Pj , m 5 (t )=Pj , m 3 (t)+cj m (t m –t )2 (t–t m – 1 )3 /(t m –t m – 1 )3 |
||||||
, |
||||||
где cj 1 |
= |
Pj ,13 (t0 ) / 2 |
, cj m = |
Pj ,m3 (tm ) / 2. |
(56) |
|
|
|
|
|
|
|
|
Эти функции не нарушают предыдущих ограничений, но обеспечивают также и выполнение условия (53).
Определим параметры сплайнов P ( t ), s = 1, ... , m, из условий (50), (51), (52) и (54). Этот сплайн является сигналом задания перемещения координаты с номером j и может быть представлен в следующем виде:
|
|
|
|
(t s –t )3 |
(t– ts – 1 )3 |
|
|||||||||
Pj , s 3 (t )= Mj , s – 1 |
|
|
|
|
+ Mj s |
|
|
|
|
+ (qj , s – 1 – |
|||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
6hs |
6 hs |
|
|
|
|||||
|
|
hs 2 |
ts – t |
|
h s 2 |
t–ts – 1 |
|
||||||||
– Mj , s – 1 |
|
|
) |
|
|
|
+(qj s – Mj s |
|
) |
|
, |
(57) |
|||
|
|
|
|
|
|
|
|||||||||
|
6 |
|
|
|
hs |
|
6 |
|
|
h s |
|
||||
где j – номер координаты; |
|
|
|
|
|
|
|
||||||||
s = 1, 2, ... , m – номер временного интервала; |
|
||||||||||||||
M j, s –1 , M j s |
– постоянные параметры для интервала вре- |
||||||||||||||
мени с номером |
s и координаты с номером j, являющиеся |
||||||||||||||
сигналами задания ускорения в моменты времени ts – 1 |
и ts ; |
||||||||||||||
hs = ts –ts – 1 – длительность временного интервала с номе- |
|||||||||||||||
ром s; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t – текущее время; |
|
|
|
|
|
|
|
|
|
|
|
|
|||
qj , s – 1 , qj s – значения координаты |
j |
в начале и конце вре- |
|||||||||||||
менного интервала с номером s. |
|
|
|
|
|
|
|
||||||||
39

Сплайн, описываемый выражением (57), удовлетворяет условиям (50) и (52). При любых значениях Mj s сигнал задания ускорения непрерывен и изменяется по кусочно-линейному закону
.. |
ts – t |
|
t – ts – 1 |
|||
Pj , s 3 (t ) = Mj , s – 1 |
|
+ Mj s |
|
|
(58) |
|
|
|
|||||
|
|
hs |
|
|
hs |
|
на отрезке времени [t s –1 , ts ].
Из уравнения (57) следуют выражения для определения сигнала задания скорости координаты номером j на интерва-
лах времени с номерами s и s+1: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
. |
|
|
|
|
(t – ts–1) 2 |
(ts – t) 2 |
|
|
|
|
|
|
|
||||||||||||
Pj,s3(t) = Mjs |
|
|
|
|
|
|
– Mj,s–1 |
|
|
|
|
– |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
2hs |
|
|
2hs |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
hs 2 |
1 |
|
|
|
|
|
hs 2 |
1 |
|
|
|
|
||||||||
– (qj,s–1 – Mj,s–1 |
|
|
) |
|
|
+ (qjs – Mjs |
|
) |
|
|
|
, |
|
|
(59) |
||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
6 |
|
|
|
hs |
|
|
6 |
|
|
|
|
hs |
|
|
||||||
. |
|
|
|
|
|
|
(t – ts) 2 |
(ts+1 – t) 2 |
|
|
|||||||||||||||
Pj,s+1,3(t) = Mj,s+1 |
|
|
|
|
|
– Mjs |
|
|
|
|
|
|
|
– |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
2hs+1 |
2hs+1 |
|
|
|
|
|
|
|
|||||||||
|
hs+1 |
2 |
|
1 |
|
|
|
|
|
|
|
2 |
|
1 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
hs+1 |
|
|
|
||||||||||
– (qjs – Mjs |
|
|
) |
|
|
|
+ (qj,s+1– Mj,s+1 |
|
|
) |
|
|
|
. |
(60) |
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
6 |
|
|
hs+1 |
|
|
|
|
|
|
6 |
|
|
|
|
|
hs+1 |
|
|
|||||||
Условия непрерывности скоростей (51) позволяют получить из выражений (59), (60) следующее уравнение:
|
hs |
|
|
hs+ hs+1 |
|
hs+1 |
||||
Mj,s–1 + Mjs |
|
+ Mj,s+1 |
|
= |
||||||
|
|
|||||||||
6 |
|
|
|
3 |
|
|
|
6 |
|
|
qj,s+1 – qjs |
qjs – qj,s–1 |
|
|
|
||||||
= |
|
|
– |
|
|
, |
s =1, ... , m–1. (61) |
|||
|
|
|
|
|||||||
|
hs+1 |
|
|
hs |
|
|
|
|||
Условия равенства нулю скорости входного сигнала (54) дают на основе системы уравнений (59), (60) недостающие уравнения для определения параметров M j 0 , M j 1, ..., M j m:
40