

Методическое пособие 76
.pdf30
Рис. 5. Изменение оператора преобразования:
а – с использованием операции умножения; б – на основе логического способа
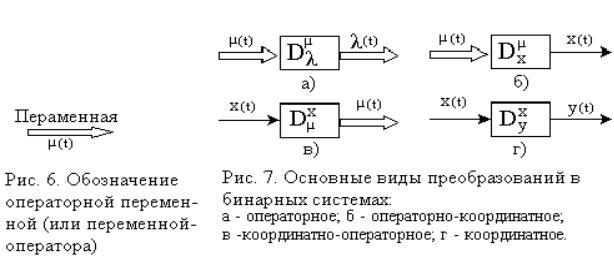
Нужно заметить, что введенное выше различие между переменнымикоординатами и переменными-операторами, конечно, условное. Для внешнего наблюдателя, незнакомого с указанным, выше содержательным разделением переменных на переменные-координаты и переменные-операторы, они суть одно и то же: переменные рассматриваемой им нелинейной динамической системы. Предлагаемое толкование переменных может служить лишь некоторым методологическим приемом. Ввиду важности этих понятий подчеркнем, что никакого формального различия между переменнымикоординатами, и переменными-операторами (см. рис. 6) не делается. Переменную называют координатой, если над ней осуществляется то или иное преобразование, и ту же самую переменную называют оператором, если ею определяется вид преобразования, выполняемого над какой-либо координатой. Такое двойственное толкование переменных состояния нелинейной динамической системы называем принципом бинарности. Динамические системы, построенные на основе, использования принципа бинарности,
назовем бинарными динамическими системами. В таких системах переменные-координаты и переменные-операторы выступают в качестве равноправных переменных состояния системы, а введенное выше различие играет важную роль лишь на этапе структурного синтеза системы.
31
Теперь опишем исходный понятийный аппарат, необходимый для построения теории бинарных систем автоматического управления, дополняя его по мере надобности. Как всякая переменная, переменная-оператор может подвергаться преобразованиям с постоянными операторами, и если выходная величина такого преобразования далее выступает в качестве оператора, то такое преобразование называют операторным и изображают в структурных схемах так, как это показано на рис. 7, а.. Если выходная величина в дальнейшем подвергается преобразованию, то такое преобразование называют операторно-координатным (рис. 7, б). Аналогичным образом определяются преобразования координатно-операторного типа (рис. 7, в) и координатного типа (рис. 7, г). Последнее преобразование обычное. Возможны и преобразования смешанного типа (рис. 8). Поскольку некоторые переменные могут участвовать в нескольких преобразованиях и в различном качестве, то имеет смысл ввести тождественные (прямое и обратное). преобразования переменных с обозначениями, указанными на рис. 9.
Использование введенных выше понятий, блоков и определений, сочетание их с различными принципами теории автоматического управления позволяет получить большое разнообразие структурных схем бинарных систем автоматического управления. Это расширяет возможности специалистов по теории управления в построении систем автоматического управления и расширения круга задач, решаемых автоматическими системами.

32
Теоретической предтечей предлагаемого адаптивного координатнооператорного подхода к проектированию технических систем, в частности, генерированию плодотворных инженерных идей, являются также и некоторые положения известных методов 1 4 морфологического, сенектики, ТРИЗа Г.С.Альтшуллера, АРП А.В.Шевырева, функционально-стоимостного анализа.
морфологического, сенектики, ТРИЗа Г.С.Альтшуллера, АРП А.В.Шевырева, функционально-стоимостного анализа.
Основной алгоритм достижения идеального конечного результата (ИКР) – рис. 10, сводится к формулировке исходного технического противоречия (ТП), построении модели технического объекта (МТО), включающего матрицу потока (МП) и матрицу элементов (МЭ), получении с помощью генератора изменений (ГИ) промежуточного результата (ПрР), корректировки его с помощью контура адаптации, и, наконец, получении ИКР.
Рис. 10. Структура алгоритма поиска ИКР.
Таким образом, основная направленность данного подхода совпадает с гегелевской диалектикой, утверждающей, что процесс познания возможен только через выявление до времени скрытых функциональных противоречий (ТП) в существующих системах знания и их преодоления путѐм отыскания действительных причин противоречивости и их устранения.
Основной решающий элемент – ГИ – представляет собой фактически измеритель рассогласования между исходным вектором и вектором целей, ставящим в соответствие каждой компоненте минимум два вектора изменений.
Таким образом, ГИ включает в себя  рис. 11
рис. 11  анализатор целей (АЦ), анализатор результатов (АР), анализатор изменений (АИ), базы данных
анализатор целей (АЦ), анализатор результатов (АР), анализатор изменений (АИ), базы данных типовых изменений потоков (БДТИП), типовых изменений элементов
типовых изменений потоков (БДТИП), типовых изменений элементов

33
(БДТИЭ), типовых структур (БДТС), кроме этого, конечно, существует и взаимосвязь между БДТИП и БДТИЭ.
Рис. 11. Структура генератора изменений.
Таким образом, типовые приемы управления ТП разделяются на как минимум координатные, операторные и структурные.
Пример применения данного подхода рассотрим на задаче уменьшения массы и габаритов технических объектов.
Для этого введѐм в рассмотрение универсальную модель технического объекта рис. 12.
Рис.12. Модель технического объекта
Модель построена в предположении, что любой объект представляет собой сложную динамическую систему – преобразователь максимум трѐх потоков  материального (МП) в размерностях выбранной системы координат – например – шестикоординатной (3 линейных и 3 угловых степени свободы)
материального (МП) в размерностях выбранной системы координат – например – шестикоординатной (3 линейных и 3 угловых степени свободы) информационного (ИП) в координатах диапазона (аналоговые сигналы) или разрядности (дискретные сигналы)
информационного (ИП) в координатах диапазона (аналоговые сигналы) или разрядности (дискретные сигналы) и, наконец, энергетического (ЭП) в координатах допустимого изменения параметров. Все потоки могут быть непрерывны или квантованы, кроме того, могут существовать различные
и, наконец, энергетического (ЭП) в координатах допустимого изменения параметров. Все потоки могут быть непрерывны или квантованы, кроме того, могут существовать различные
34
комбинированные случаи, определяемые числом сочетаний.
В модели идентифицированы координаты (потоки) К, операторы (элементы) О, структуры С. Кроме этого, конечно, присутствует и вектор результата.
Типовое решение задачи улучшения массогабаритных показателей состоит минимум из двух возможных вариантов
экстенсивного, связанного с увеличением степени использования потока (например, использование более качественных материалов, эффективный отвод теплопотерь и т.п.)
интенсивного, связанного с качественным преобразованием, переходом к новым формам, эффектам, нетрадиционным структурам.
Экстенсивный вариант связан чаще всего с чисто конструктивными доработками, эффективен при наличии резервов конструкции.
Использование интенсивного варианта связано с анализом минимум трѐх массивов (наподобие морфологических матриц), их сочетаний с точки зрения оценки массы и габаритов
 матрица структур (в двумерном варианте) фиксирует последовательное, параллельное, с ОС, концентричные соединения, а также структуры звездообразные, петлеобразные, кольцевые типа общая шина , кроме того, могут применяться развитые структуры – например – иерархическая, как развитие звездообразной
матрица структур (в двумерном варианте) фиксирует последовательное, параллельное, с ОС, концентричные соединения, а также структуры звездообразные, петлеобразные, кольцевые типа общая шина , кроме того, могут применяться развитые структуры – например – иерархическая, как развитие звездообразной
 матрица координат (потоков) – различные виды МП (механические, пневматические, гидравлические связи и т.п.), ИП (с указанием типа носителя информации) и ЭП с конкретизацией энергоносителя, целесообразно уже в этой матрице указать конструктивную привязку потока, поскольку для уменьшения массы, особенно, подвижных частей объекта, полезно перераспределение потоков с подвижных элементов на неподвижные;
матрица координат (потоков) – различные виды МП (механические, пневматические, гидравлические связи и т.п.), ИП (с указанием типа носителя информации) и ЭП с конкретизацией энергоносителя, целесообразно уже в этой матрице указать конструктивную привязку потока, поскольку для уменьшения массы, особенно, подвижных частей объекта, полезно перераспределение потоков с подвижных элементов на неподвижные;
матрица элементов (операторов) должна отражать конструктивные формы в физических координатах во взаимодействии с матрицами координат и структур и способы изменения этих форм, например, дробление и или объединение, разворачивание и или сворачивание, закручивание и или скручивание и т.п.
На этих принципах возможно стуктурирование типовых приемов устранения технических противоречий:
-структурные приемы: дробление, вынесение, объединение, интегрирующей концентрации, принцип «обратить вред в пользу», обратной связи, самообслуживания, отброса и регенерации;
–операторные приемы: принцип местного колеса, асимметрии, антивеса, эквипотенциальности, сфероидальности, динамичности, использования колебаний, периодического действия, непрерывности, проскока;
–координатные приемы: предварительное напряжения, предварительное исполнение, «посредника»;
–комбинированные: универсальность, переход в другое измерение, копирования, изменение физико-химических параметров объекта, применение

35
фазовых переходов, окислителей, композиционных материалов.
Перебор набора данных типовых противоречий в сочетании с известными матрицами объекта, приводит к достижению целей, типовыми из которых являются:
уменьшение массы и габаритов; приспособление формы к объекту; увеличение энергетических показателей;
увеличение продолжительности действия (сокращение потерь времени); уменьшение вредных факторов (потерь); увеличение точности измерения, изготовления; улучшение информации; увеличение степени автоматизации (роботизации); увеличение удобства эксплуатации; повышение надежности; повышение производительности.
Адаптивный координатно-операторный подход к проектированию состоит в одновременном движении к ИКР по трем направлениям – К,О и С, их возможных сочетаниям с анализом оценки приближения к ИКР при каждом шаге изменения по К,О и С.
В конкретном случае необходимости уменьшения массы и габаритов, кроме уже упоминавшегося перераспределения потоков эффективно введение форм высших порядков, например, двойная, тройная крутка спиральных элементов, орбитальное движение вращающихся тел, принцип фон Неймана в ИП, и т.п. Данные формы и структуры должны быть также включены в соответствующие матрицы.
Кроме уже упоминавшегося ТРИЗа, предложенный подход базируется также на теории конструирования на основе преобразования потоков Р.Коллера 6 , по которой все технические системы делятся на машины, аппараты и приборы – суть преобразователи энергии, веществ и информации, при этом выделяются описательные операции: излучение – поглощение, проводимость – изолирование, сбор – рассеивание, и т.д.
Однако, в отличие от теории Коллера, адаптивный координатнооператорный подход помимо большей общности и широты поля поиска, допускающей комбинации различных координат (потоков) и операторов, имеет и расширенный арсенал средств разрешения технических противоречий за счѐт операций перераспределения (вынос  концентрирование) потоков, введения форм высших порядков.
концентрирование) потоков, введения форм высших порядков.
При незначительном усложнении аппаратно-программных средств это даѐт возможность локализовать область приближения к заданным параметрам (например, массе и габаритам), что в конечном итоге, приведѐт к более быстрому нахождению параметров и структур ИКР. Это обусловлено, в основном, дополнением потокового принципа структурным и операторным, что расширяет возможности данного подхода по сравнению со всеми

36
известными.
На базе данного подхода были реализованы технические решения в области приводов промышленных роботов на базе орбитальных электромеханических систем. Достигнуто уменьшение массы и габаритов подвижных частей роботов, преимущественно работающих в цилиндрической системе координат, на основе принципа перераспределения ЭП. Данные технические решения защищены пакетом из более чем 50 авторских свидетельств и патентов 15-35 .
Контрольные вопросы
Осветите роль информации об изобретениях и методах генерации технических идей при проведении научно-исследовательских работ.
Как связано изобретательство с инженерной деятельностью? Изложите суть метода морфологического анализа.
Вчем сущность метода мозгового штурма? Каковы достоинства метода синектики?
Вчем состоит алгоритм АРИЗ – 62?
Вчем отличие АРИЗ – 71 от АРИЗ – 61? Каково основное положение кибернетики?
Вчем сходство и отличие бинарного подхода к изучению систем управления от традиционного?
Каков алгоритм поиска ИКР в рамках адаптивного координатнооператорного подхода?
Какая структура у генератора изменений?
Из каких элементов состоит обобщенная модель технического объекта?
Вчем заключается преимущество адаптивного координатно-операторного подхода к проектированию технических систем по сравнению с известными?
Литература
1.Пигоров Г.С., Таран Ю.Н., Бельгольский Б.П. Интенсификация
инженерного творчества: Потребности, методы, формы организации.  М.:
М.:
Профиздат, 1989. – 192 с., ил.
2.Альтшуллер Г.С. Алгоритм изобретения. – М.: Московский рабочий,
1973. – 296 с., ил.
3.Соломенцев Ю.М., Сосонкин В.Л. Управление гибкими призводственными системами. – М.: Машиностроение, 1988. – 352 с., ил.
4.Лопухина Е.М., Захаренко А.Б. Генерация идей и инженерное творчество Под ред. Т.С.Юргенсон. – М.: Издательство МЭИ, 1999. – 159с., ил.
Под ред. Т.С.Юргенсон. – М.: Издательство МЭИ, 1999. – 159с., ил.
5.Литвиненко А.М. Электроприводы промышленных роботов с внешними магнитными системами. – Воронеж: Изд-во ВГУ, 1989. – 160 с., ил.
6.Справочник по функционально-стоимостному анализу А.П.Ковылѐв и др.; Под ред. М.Г.Карпунина и Б.И.Майданчика. – М.: Финансы и статистика,
А.П.Ковылѐв и др.; Под ред. М.Г.Карпунина и Б.И.Майданчика. – М.: Финансы и статистика,
37
1988. – 431 с., ил.
7.Тринг М. , Лейтуэйт Э. Как изобретать ? Пер. с англ. – М.: Мир, 1980. 272 с.,ил.
8.Чяпеле Ю. М. Методы поиска изобретательских идей. – Л.: Машиностроение. Ленинград. отд-ние, 1990. – 96 с., ил.
9.Трушкин В.П. Записки конструктора. – М.: Моск. рабочий, 1981. – 320 с.,
ил.
10.У истоков НОТ. Забытые дискуссии и нереализованные идеи. Составитель Э. Б. Корицкий. Л.: Изд-во ЛГУ, 1990. – 336 с., ил.
11.Костюк В. И., Широков Л. А. Автоматическая параметрическая оптимизация систем регулирования. – М.: Энергоиздат, 1981 – 96 с., ил.
12.Повышение экономической эффективности проектов машиностроительных предприятий / Е. М. Карлик и др.; Под общ. Ред. Е. М. Карлика. – М.: Машиностроение, 1988. – 264 с., ил.
11.Эмерсон Г. Двенадцать принципов производительности. Пер. с англ. М.: Экономика, 1972. – 223 с., ил.
12.Промышленные роботы и их элементы. Аннотированный указатель изобретений / Под ред. Х. Ф. Рамхена. – Новосибирск.: ТПНТБ СО АН СССР, 1981. – 578 с., ил.
13.Литвиненко А. М. Электроприводы промышленных роботов с внешними магнитными системами. – Воронеж: Изд-во ВГУ, 1989 – 160 с.
14.Литвиненко А. М. Орбитально-планетарный электропривод с внешними магнитными системами // Электричество. – 1994. – №3 с.41-61.
15.Литвиненко А. М. Универсальный орбитальный электропривод // Автоматизация и современные топологии. – 1992. – №6 – с. 5-6.
16.Литвиненко А. М. Модульные приводы ПР с внешними магнитными системами // Механизация и автоматизация производства. – 1991. – №3 – с. 1921.
17.Литвиненко А. М. Электромеханический манипулятор // Электротехника. – 1988. – №6. С. 54-56.
18.Литвиненко А. М. Электромеханический манипулятор с внешними магнитными системами // Электричество. – 1988. – №7. – с. 57-62.
19.Литвиненко А. М. Двухскоростной орбитальный электропривод // Электричество. – 1997. – №1. – с. 43-50.
20.Патент 2071631 Российской Федерации, МКИ6 Н 02 К 41/06. Орбитальный мотор – редуктор / А. М. Литвиненко (РФ). – 4 с.: ил.
21.Патент 2074490 Российской Федерации, МКИ6 Н 02 К 41/06. Мотор – редуктор / А. М. Литвиненко (РФ). – 4 с.: ил.
22.Патент 2009880 Российской Федерации, МКИ6 F 16 H 13/00. Электромеханический волновой привод / А. М. Литвиненко (РФ). – 4 с.: ил.
23.А. с. №851660 СССР, Способ измерения температурных вариаций параметров электроприводов / Литвиненко А. М. – Опубл. в Б. И. №28, 1981, с.
266.
38
24.А, с. №890281 СССР, Способ определения изменения параметров электродвигателя при тепловых испытаниях / Литвиненко А. М. – Опубл. в Б. И. №46, 1981, с. 238.
25.А. с. №871279 СССР, Тепловая модель электродвигателя / Литвиненко А. М. – Опубл. в Б. И. №46, 1981, с. 238.
26.А. с. №765969 СССР, МКИЗ Н 02Р 7/42, – Электропривод переменного тока / А. М. Литвиненко – №260702/24-07, Заявлено 24.04.78, Опубл. 23.09.80, Бюл. №35.
27.А. с. №911664 СССР, МКИЗ Н 02Н7/08, Тепловая модель электродвигателя постоянного тока / А. М. Литвиненко – №2895663/24-07, Заявлено 18.03.80, Опубл. 07.03.82, Бюл. №9.
28.А. с. №871279 СССР, МКИЗ Н02К 11/00, Тепловая модель электродвигателя / А. И. Зайцев, А. М. Литвиненко, В. А. Носков – №2878395/24-07, Заявлено 29.01.80, Опубл.07.10.81, Бюл.№37.
29.А. с. №1034118 СССР, МКИЗ Н 02Н 7/085, Тепловая модель электродвигателя / А. М. Литвиненко – №2895662/24-07, Заявлено 18.03.83, Опубл.27.07.83.
30.А. с. №1037373 СССР, МКИЗ Н 02Н 7/085, Тепловая модель электродвигателя / А. М. Литвиненко – №3384267/24-07, Заявлено 10.12.81, Опубл.23.08.83.
31.А. с. №955332 СССР, МКИЗ Н 02Н 7/085, Тепловая модель электродвигателя / А. М. Литвиненко – №2928019/24-07, Заявлено 21.05.80, Опубл.30.08.82.
32.А. с. №1266730 СССР, МКИ4 В 25J119/08, Электромеханический модуль промышленного робота / А. М. Литвиненко – №380211/25-08, Заявлено 17.10.84, Опубл. 30.10.84, Бюл. №40.
33.А. с. №1266730 СССР, МКИ4 В 25J15/000, Схват манипулятора / А. М. Литвиненко – №3802504/25-08, Заявлено 17.10.84, Опубл. 07.12.86, Бюл. №40
34.А. с. №1274920 СССР, МКИ; В 25J0/08, Электромеханический модуль промышленного робота / А. М. Литвиненко – №3802106/25-08, Заявлено17.10.84, Опубл. 07.12.86,Бюл. №45
35.А. с. №1283082 СССР, МКИ4 В 25J9/00, Привод линейного перемещения / А. М. Литвиненко – №3828320/31-08, Заявлено 19.12.84, Опубл. 15.01.87, Бюл. №2.
36.А. с. №1266737 СССР, МКИ4 В 25J15/00, Привод схвата манипулятора / А. М. Литвиненко – №3813169/25-08, Заявлено 19.11.84, Опубл. 30.10.86, Бюл. №40.
37.А. с. №1269990 СССР, МКИ4 В 25J1/00, Манипулятор / А. М. Литвиненко – №3802951/25-08,Заявлено 16.10.84, Опубл. 15.11.86, Бюл.№42.
38.А. с. №1281407 СССР, МКИ; В 25J15/06, Схват робота / А. М. Литвиненко – №3963727/31-08, Заявлено 13.08.85, Опубл.07.01.87,бюл. №1.
39.А. с. №1323367 СССР, МКИ4 В 25J11/00, Привод манипулятора / А. М. Литвиненко – №4021954/31-08/ Заявлено 10.02.86,опубл. 15.07.87, Бюл. №26.
39
40.А. с. №1323363 СССР, МКИ4 В 25J1/00, Манипулятор / А. М. Литвиненко – №4021935/31-08, Заявлено 10.02.86, Опубл. 15.07.87, Бюл. №37.
41.А. с. №1404330 СССР, МКИ4 В 25J11/00, Промышленный робот / А. М. Литвиненко – №4157353/31-08, Заявлено 08.12.86, Опубл. 23.06.88, Бюл. №23.
Содержание
1.Роль информации об изобретениях и способах генерации технических идей при проведении научно-исследовательских работ……………………….3
2.Изобретательство в инженерной деятельности …………………………..4
3.Традиционные эвристические способы генерирования инженернотехнических решений…………………………………………………………….7
4.Теория решения изобретательских задач (ТРИЗ)………………………..15
5.Адаптивный координатно-операторный подход к проектированию технических систем………………………………………………………………27