

Планы ускорений механизма
Необходимо построить планы ускорений кривошипно-ползунного механизма лишь для двух цилиндров двигателя внутреннего сгорания.
Строим план ускорений для первого положения механизма.
Рассматриваем
вначале ускорения точек входного звена
АО. Ускорение точки О равно нулю, так
как эта точка неподвижна при работе
механизма:
![]() На плане ускорений вектор
На плане ускорений вектор
![]() поэтому отсутствует; точка
поэтому отсутствует; точка
![]() на плане ускорений совпадает с полюсом
(рис. 6.8).
на плане ускорений совпадает с полюсом
(рис. 6.8).
Для определения ускорения точки А составляем векторное уравнение ускорений:
![]() .
.
Величину
тангенциальной составляющей ускорения
определяем по формуле
![]() ,
где
,
где
![]() – угловое ускорение звена 1, на котором
расположены рассматриваемые точки,
– угловое ускорение звена 1, на котором
расположены рассматриваемые точки,
![]() –
расстояние между точками А и О.
–
расстояние между точками А и О.
По
заданию вращение входного звена механизма
(кривошипа АО) равномерное, поэтому
тангенциальная составляющая ускорения
точки А относительно точки О равна нулю.
Так как
![]() и
и
![]() то
то
![]() .
.
Величину этого ускорения определяем по формуле
![]()
![]()
Вектор (см. рис. 6.8) параллелен линии АО звена 1 на схеме механизма и направлен от точки А, движение которой рассматривается, к точке О, принятой в качестве полюса. Задаемся длиной этого вектора и проводим этот вектор.
Принимаем
![]() Тогда масштаб плана ускорений будет
Тогда масштаб плана ускорений будет
![]()
Рассматриваем далее точки структурной группы звеньев 2-3: А, В и В6.
б)
а)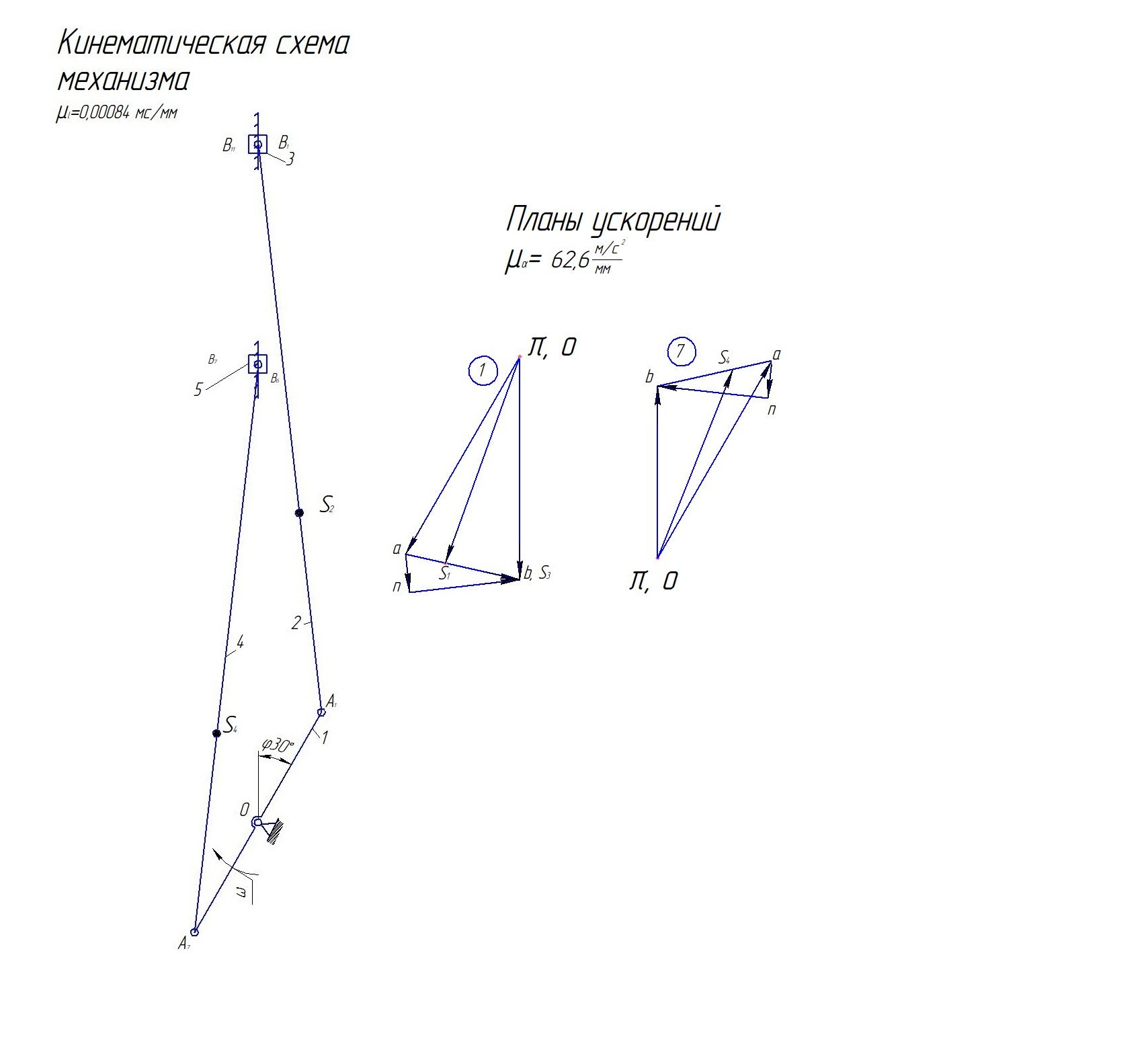



Рис.6.8. Кинематическая схема кривошипно-ползунного механизма двигателя (а)
и планы ускорений (б)
В поступательной кинематической паре соединения звеньев 3 и 6 взяты две точки: подвижная точка В, принадлежащая звену 3, и неподвижная точка В6, принадлежащая звену 6 (стойке). Обе эти точки в рассматриваемое мгновение по положению совпадают.
Ускорение точки В необходимо определить. Ускорения же двух остальных точек известны: ускорение точки А найдено, и его вектор на плане ускорений уже проведен, ускорение же точки В6 стойки равно нулю.
Составляем систему двух векторных уравнений ускорений:
![]() ;
;
![]() .
.
Приравниваем правые части этих двух уравнений, так как левые части их равны:
![]()
![]() .
.
Вычисляя
кориолисово ускорение, видим, что оно
равно нулю, так как ползун 3 и направляющая
стойки 6, входящие в поступательную
кинематическую пару, вращательного
движения совершать не могут:
![]()
![]()
Так
как
![]() и
и
![]() ,
то векторное уравнение для ускорений
точек механизма можно представить в
виде
,
то векторное уравнение для ускорений
точек механизма можно представить в
виде
![]()
![]() .
.
Определяем
величину и направление нормальной
составляющей ускорения
![]() .
.
![]() ,
,
где
![]()
Вектор
![]() (см. рис. 6.8) параллелен линии BА
звена на схеме механизма и направлен
от точки В, движение которой рассматривается,
к точке А, принятой в качестве полюса.
(см. рис. 6.8) параллелен линии BА
звена на схеме механизма и направлен
от точки В, движение которой рассматривается,
к точке А, принятой в качестве полюса.
Так
как по уравнению эту составляющую
необходимо прибавить к ускорению
![]() ,
то на плане ускорений точка
на конце вектора
будет началом вектора
.
Определяем длину этого вектора с
учетом
принятого масштаба плана ускорений:
,
то на плане ускорений точка
на конце вектора
будет началом вектора
.
Определяем длину этого вектора с
учетом
принятого масштаба плана ускорений:
![]() (
).
(
).
Проводим
этот вектор. По уравнению необходимо
далее прибавить вектор тангенциальной
составляющей ускорения
![]() ,
поэтому из точки
плана ускорений (см. рис. 6.8) проводим
линию вектора
.
Направление этого вектора известно:
он перпендикулярен прямой ВА схемы
механизма, а величину вычислить не
представляется возможным, так как
угловое ускорение звена АВ неизвестно.
,
поэтому из точки
плана ускорений (см. рис. 6.8) проводим
линию вектора
.
Направление этого вектора известно:
он перпендикулярен прямой ВА схемы
механизма, а величину вычислить не
представляется возможным, так как
угловое ускорение звена АВ неизвестно.
По
уравнению на плане ускорений необходимо
провести еще релятивное ускорение
![]() ,
направление которого известно: оно
параллельно направляющей относительного
поступательного движения звеньев 3 и
6, то есть параллельно линии ОВ механизма
(см. рис. 6.8). Величина вектора неизвестна.
,
направление которого известно: оно
параллельно направляющей относительного
поступательного движения звеньев 3 и
6, то есть параллельно линии ОВ механизма
(см. рис. 6.8). Величина вектора неизвестна.
Из полюса плана ускорений проводим линию вектора параллельно направляющей относительного поступательного движения звеньев 3 и 6, то есть параллельно линии АВ механизма. Находим точку пересечения этой линии с линией вектора . Это точка плана ускорений. В соответствии с уравнением обозначаем стрелки векторов ускорений на плане ускорений.
Находим положение точек s2 и s3 центров тяжести шатуна 2 и ползуна 3 на плане ускорений. Считаем, что точки В и S3 у механизма совпадают. Аналогичные точки должны совпадать и на плане ускорений. По заданию имеем следующее соотношение размеров:
AS2/AB=0,3.
По теореме подобия для планов ускорений аналогичное соотношение соответствующих размеров должно быть и на плане ускорений. Отсюда
![]()
![]() .
.
Откладывая это расстояние на плане ускорений, получаем точку s2. Соединяя точку полюса плана ускорений с найденной точкой s2, получаем вектор ускорения точки S2.
Ускорения центров тяжести шатуна и ползуна:
![]() ,
,
![]() .
.
Строим план ускорений для седьмого положения механизма в той же последовательности. На рис. П.3 приведен вид первого листа курсового проекта.