

4.5.5. Нормируемые параметры (показатели),
характеризующие плавность работы
Показатели плавности работы и охватываемые степени точности приведены в табл. 11 (желательно запомнить только обозначения и названия параметров).
Особенность нормирования требований к точности в отношении плавности работы заключается в том, что даются раздельные требования для колес и передачи, которые в табл. 11 названы широкими косозубыми, и для колес прямозубых вместе с узкими косозубыми.
В стандарте эти термины не используются, но нормы задаются с учетом осевого перекрытия, что отражает существо работы колес. Дело в том, что настоящим косозубым колесом с проявлением всех его достоинств в работе является колесо, в котором есть осевое перекрытие, т.е. одновременно при зацеплении находится более одной пары зубьев в сечении осевой плоскостью. Если такого перекрытия нет, то колеса даже с косыми зубьями по нормам точности относятся к прямозубым.
Принципиальный подход при нормировании точности по плавности работы тот же, что и при нормировании кинематической точности, т.е. нормируются требования по одному параметру либо комплексу из двух параметров.
Таблица 11
Колеса или передача |
NN п/п |
Нормируемые показатели точности или комплексы показателей |
Условные обозначения |
Степени точнос-ти |
|
Прямо-зубые и узкие косозубые |
колеса |
1 |
Местная кинематическая погрешность зубчатого колеса |
f`` ir |
3…6 |
2 |
Циклическая погрешность зубцовой частоты колеса |
fzzr |
3…6 |
||
3 |
Отклонение шага зацепления и погрешность профиля зуба |
fpbr и ffr |
3…6 |
||
4 |
Отклонение шага зацепления и отклонение шага |
fpbr и fptr |
3…6 |
||
5 |
Колебание измерительного межосевого расстояния на одном зубе |
fir |
5…8 |
||
пере-дачи |
6 |
Местная кинематическая погрешность передачи |
f` ior |
3…8 |
|
7 |
Циклическая погрешность зубцовой частоты в передаче |
fzzor |
3…8 |
||
Любые колеса |
8 |
Колебание измерительного межосевого расстояния на одном зубе |
fir |
9…12 |
|
9 |
Отклонение шага зацепления |
fpbr |
9…12 |
||
10 |
Отклонение шага |
fptr |
9…12 |
||
Широ-кие косозу-бые |
колеса |
11 |
Циклическая погрешность зубчатого колеса |
fzkr |
3…8 |
12 |
Отклонение шага |
fptr |
3…8 |
||
пере-дачи |
13 |
Циклическая погрешность передачи |
fzkor |
3…8 |
|
Из приведенных в табл. 11 параметров колебание измерительного расстояния на одном зубе fir отличается от ранее рассмотренного, только выявлением этой погрешности ориентировочно на одном зубе.
Местная кинематическая погрешность колеса (f ` ir) и передачи (f ` ior) циклическая погрешность зубцовой частоты колеса (fzzг) и передачи (fzzor), циклическая погрешность колеса (fzkr) и передачи (fzkor) получаются по результатам измерения кинематической погрешности колеса или передачи,
а) Местной кинематической погрешностью колеса (f ` ir) и передачи (f ` ior) называется наибольшая разность между местными соседними экстремальными (минимальным!: и максимальными) значениями кинематической погрешности колес в пределах одного оборота (f ` ir, рис. 66) или за полный цикл изменения относительного положения зубчатых колес передач (f ` ior) - Эти погрешности выявляются непосредственно по кривой записи погрешности.
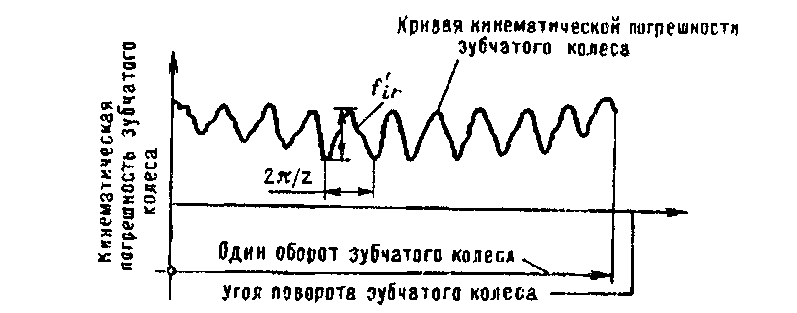
Рис. 66. Местная кинематическая погрешность зубчатого колеса
б) Циклической погрешностью колес (fzkr) и передачи (fzkor) называется удвоенная амплитуда (размах) гармонической составляющей кинематической погрешности колеса или передачи (рис. 67).
в) Циклической погрешностью зубцовой частоты колеса (fzzr) и передачи (fzzor) называется циклическая погрешность с частотой повторения, равной частоте входа зубьев в зацепление с измерительным зубчатым колесом (fzzr) или при зацеплении в паре (fzzor).
Все циклические погрешности выявляются по результатам гармонического анализа данных, полученных при измерении кинематической погрешности. Использование этих параметров на практике пока еще не распространено, но можно предположить, что в дальнейшем они получат распространение в связи с развитием и широким использованием электронных приборов и для анализа точности технологического процесса.

Рис. 67. Циклическая погрешность колеса (а) и передачи (б)
г) Отклонением шага зацепления (fpbr) называется разность между действительным (измеренным) и номинальным шагами зацепления. Под действительным шагом зацепления понимается кратчайшее расстояние между двумя параллельными плоскостями, касательными к двум одноименным активным боковым поверхностям соседних зубьев зубчатого колеса (рис. 68). Раньше этот параметр назывался основным шагом.

Рис. 68. Шаг зацепления
д) Отклонением шага зубчатого колеса (fptr) (раньше этот параметр назывался окружным шагом) называется дискретное значение кинематической погрешности зубчатого колеса при повороте его на один номинальный угловой шаг. Однако, как и в случае накопленной погрешности шага, определяется положение рабочих поверхностей по положению одной точки на поверхности зуба. Вместо отклонения шага стандарт допускает нормировать разность шагов (fuptr), т.е. разность между двумя отклонениями шагов в любых участках зубчатого колеса.
е) Профилем цилиндрических зубчатых колес называется линия пересечения действительной боковой поверхности зуба плоскостью, перпендикулярной его рабочей оси. Погрешностью профиля (ffr) (рис. 69) называется расстояние по нормали между двумя ближайшими друг к другу номинальными торцевыми профилями зуба, между которыми размещается действительный (измеренный) торцовый активный профиль зуба зубчатого колеса.

Рис. 69. Погрешность профиля зуба
В цилиндрических зубчатых колесах, в основном, используются эвольвентные поверхности для получения профиля.